

Устройство цветного лазерного принтера
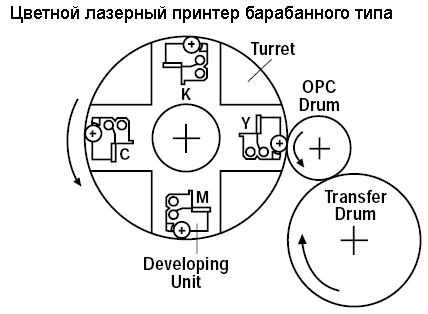
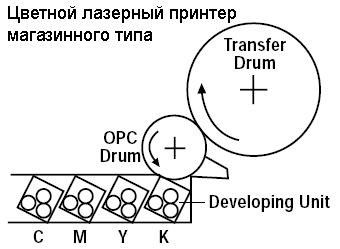
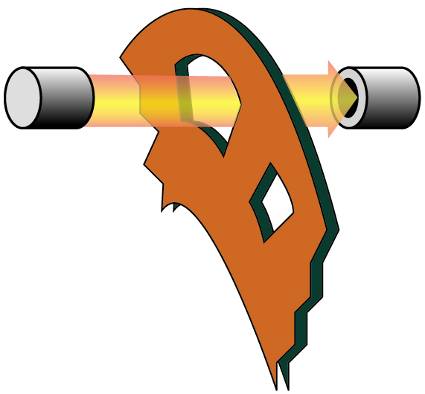
Цветные лазерные принтеры значительно сложнее черно-белых по кинематике. Это связано с необходимостью наносить на бумагу не одну краску, а четыре (циановую, маджентовую, желтую и черную). В зависимости от того, как подаются к бумаге картриджи с соответствующим тонером, различают барабанный и магазинный типы цветных лазерных принтеров. Их схематическое устройство показано на рисунках ниже.
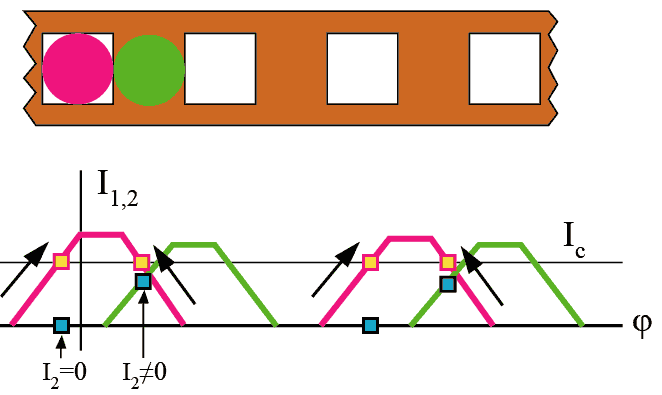
ТЕХНОЛОГИЯ ПОЛУЧЕНИЯ НАПЕЧАТАННОЙ ПОЛУТОНОВОЙ ТОЧКИ
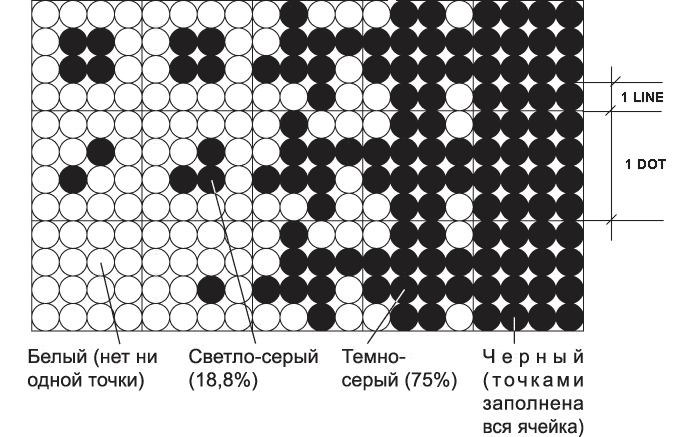
Полутоновая напечатанная точка (dot) в растровых устройствах вывода моделируется частичным заполнением ее площади красителем. В силу этого дот соответствует обычно квадрату из 16 элементарных точек диаметром в одну микрокаплю струйного принтера или в ширину следа луча лазерного принтера (line).
Один из вариантов получения полутоновых точек серой шкалы показан на рисунке.
Итоги раздела
Первая группа устройств графического вывода – для вывода «живого» компьютерного изображения, нередко с движением, то есть динамического. На сегодняшний день все они – растровые и все они реализуют цветовую модель RGB.
Мониторы – сегодня практически 100% это устройства на жидкокристаллических оптических затворах. Кинескопные практически «сошли со сцены».
Проекторы – второй тип оперативных устройств вывода на большие экраны. Наиболее оптимальный тип – на микрозеркальных матрицах.
ВТОРАЯ ГРУППА устройств графического вывода – для получения т.н. «твердых» копий (бумажных, на ткани, пластмассе и т.д.) Для бумажных отпечатков сегодня практически 100% - это растровые устройства (принтеры) и все они реализуют цветовую модель CMYK. Мы рассмотрели только две технологии печати – лазерную (на принципе электрографии) и струйную (которую правильнее следовало бы называть капельной).
В работе всех устройств графического вывода применяются самые современные технологии и технические решения, часто основанные на необычных физических эффектах.
18Устройства графического ввода
План раздела
Конструкция и принцип работы манипулятора «мышь».
Трекболл.
Конструкция и принцип работы электромагнитного графического планшета.
Конструкция и принцип работы джойстика.
Конструкция и принцип работы сенсорной панели.
Конструкция и принцип работы сканера.
КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ МАНИПУЛЯТОРА «МЫШЬ»
Кинематика механической «мыши»
ОПТОПАРА = светодиод + фотодиод
Шар, покрытый резиной, вращает два ролика, на осях которых находятся «крыльчатки». Они открывают и перекрывают свет, излучаемый светодиодами, меняя тем самым сигнал фотодиодов. Два ролика нужны для выработки двух сигналов перемещения мыши – вдоль горизонтали и вдоль вертикали.
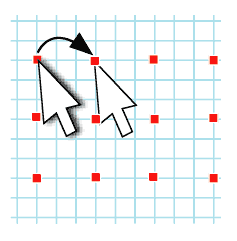
Выработка сигнала прыжка указателя
Указатель мыши перемещается на экране дискретно, с заданным шагом в пикселах.
Один «прыжок» происходит от сигналов двух оптопар, установленных на каждой крыльчатке. Одна оптопара вырабатывает сигнал «сделать прыжок», вторая – сигнал направления прыжка (в направлении положительном или отрицательном). Существенно то, что первая оптопара вырабатывает сигнал «сделать прыжок» только на нарастающем фронте ее сигнала. Поэтому при этом при одном направлении движения вторая оптопара имеет нулевой сигнал, а при противоположном – ненулевой. Именно так распознается направление движения мыши.
КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ ОПТИЧЕСКОЙ МЫШИ
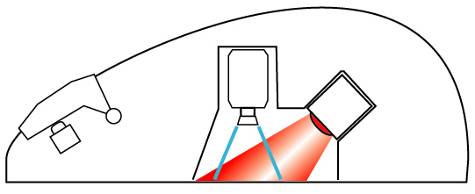
В мышь вмонтирован источник света и микрокамера, которая с высокой частотой снимает площадку 16 на 16 пикселов в поле своего зрения. Вычитая последующий сигнал из предыдущего, можно подбором определить смещение мыши за период детекции. Драйвер мыши передвинет указатель в соответствующее положение.
ТРЕКБОЛЛ (TRACK-BALL)



Обращенная мышь. Шар вращают ладонью или пальцем. Игровое устройство.
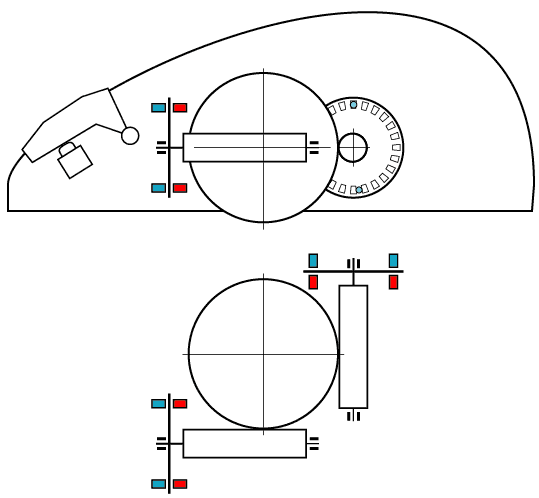
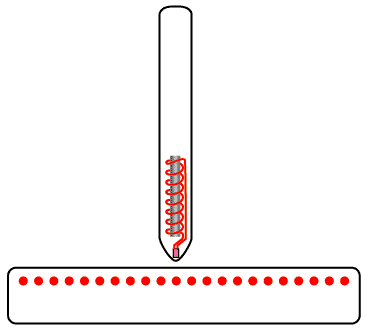
ПЛАНШЕТ ЭЛЕКТРОМАГНИТНЫЙ
Его кинематика больше всего соответствует работе с карандашом. Обычно в комплекте – сам чувствительный планшет, «ручка» и мышь.


Принцип действия
Под поверхностью планшета расположены два ряда проводников. Ими определяют место указателя ручки на планшете.
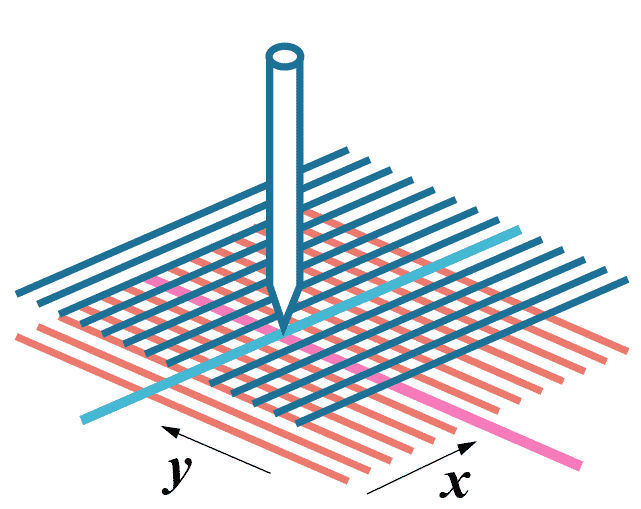
Периодически эти проводники работают как плоска радиоантенна, исмпуская питающий ручку сигнал. Соленоид ручки на короткое время удерживает долю энергии этого сигнала и этого достаточно для генерации импульса позиционирования, который испускает микропередатчик в кончике ручки.
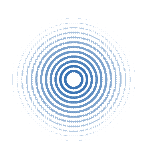
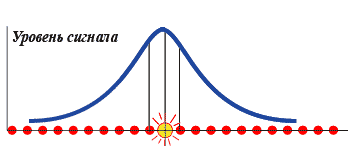
Проводники планшета в этот момент переключены на прием. Уровень сигнала в каждом проводнике измеряется и вычислениями в драйвере планшета определяется координата максимума сигнала. Это и есть координата указателя на планшете.
Широко применяется дизайнерами и художниками.