

21. Планарные градиентные системы X(y), схемы включения.
Планарные ГС строятся из проводников в форме кругового витка или комбинаций линейных проводников с током, расположенных на плоскости. Токи в секциях обмоток градиентных систем направлены таким образом, что индукция магнитного поля в центре системы равна нулю. Поэтому в разложении (2.1.5) присутствуют только члены с нечетными степенями координаты, по которой создается градиент и можно пользоваться разложениями функции индукции в степенные ряды.
Градиент магнитного поля, создаваемый системой 41 направлен вдоль оси X. Для создания градиента вдоль оси Y используется устройство, повернутое на 90º вокруг оси Z.
Задача синтеза планарных систем поперечного градиента первоначального решается приближенно при допущении, что рабочие и обратные проводники обмоток имеют бесконечную длину, а боковые проводники отсутствуют. Параллельные оси Z составляющая индукции поля бесконечно длинного прямолинейного проводника с током I, расположенного на расстоянии x0 в точке пространства с координатами x,y,z определяются выражением

μ0-магнитная постоянная, z0-половина расстояния между плоскостями обмоток. Для системы на рисунке:
Bz=2(G1x+G3x3+…Gnxn…),
где
 – коэффициент n-го
члена ряда, n=1,3,5…
– коэффициент n-го
члена ряда, n=1,3,5…
Отсюда следует, что линейный характер градиента определяется первым членом разложения, а все остальные члены ряда искажают линейный характер изменения индукции. Задача получения линейного градиента магнитного поля сводится к минимизации коэффициентов третьего и выше порядков.
22. Расчёт электрических параметров планарной градиентной системы X(y).
Рис. 2.5.10. Система поперечного градиента (1,2 – параллельные плоско-сти, 3, 4, 5 - прямые, обратные и боковые проводники)
Градиент магнитного поля, создаваемый рассматриваемой системой, направлен вдоль одной из осей, параллельной плоскости наконечников, например, вдоль оси X. Для создания градиента относительно другой оси, например, оси Y , используется аналогичное устройство, развернутое на 90°. Направим ось X перпендикулярно оси симметрии катушек. Обозначим расстояние между пластинами L=2z0 (рис.2.5.10). Тогда, параллельная оси Z составляющая индукции поля бесконечно длинного прямолинейного проводника, расположенного на расстоянии X0 с током I в точке с координатами z, x определяется выражением
 ,
(2.5.20)
,
(2.5.20)
где μ0– магнитная постоянная; z0 – половина расстояния между пластинами. Для системы прямоугольных витков, изображенной на рис.2.5.10, с идентичными по величине и направлению токами в двух полюсных плоскостях, выражение (2.5.20) раскладывается в ряд
 ,
(2.5.21)
,
(2.5.21)
где
 – коэффициент n-го
члена ряда,n=1,3,5..
– коэффициент n-го
члена ряда,n=1,3,5..
Отсюда видно, что линейный характер градиента определяется первым членом разложения, а все последующие члены ряда искажают линейный закон изменения индукции. Таким образом, задача получения линейного градиента магнитного поля сводится к минимизации коэффициентов третьего и выше порядков.
Проведем оценку нежелательных градиентов третьего, пятого и седьмого порядков. Запишем более подробно выражение для -компоненты индукции магнитного поля
 ,
(2.5.22)
,
(2.5.22)
где
 –
относительный размер катушки.
–
относительный размер катушки.
Нетрудно
рассчитать, что изменения поля,
определяемые градиентами третьего,
пятого и седьмого порядков, составляют
5%, 1% и 0,2%, соответственно, от изменения,
создаваемого требуемым линейным
градиентом
 .
.
С точки зрения разрешающей способности, вклад нежелательных градиентов должен составлять не более 1%. Следовательно, для создания необходимой линейности нужно компенсировать градиенты, вносящие в магнитное поле изменения порядка 1%.
Проведенные
расчеты позволяют сделать вывод о
необходимости компенсации градиентов
 до
седьмого порядка включительно, так как
их вклад в изменение поля наиболее
ощутим. Для этого необходимое число
секций в катушках должно быть не менее
трех. Система прямоугольных катушек,
состоящая из трех секций с одинаковым
числом витков K,
имеет четыре независимых параметра:
x01,x02,x03
– расстояния от оси симметрии до первой,
второй и третьей секций, x04
– расстояние от оси симметрии до общей
стороны (до обратных проводников).
Подбором этих параметров, можно
скомпенсировать три члена ряда (2.5.21) –
третьего, пятого и седьмого порядков.
до
седьмого порядка включительно, так как
их вклад в изменение поля наиболее
ощутим. Для этого необходимое число
секций в катушках должно быть не менее
трех. Система прямоугольных катушек,
состоящая из трех секций с одинаковым
числом витков K,
имеет четыре независимых параметра:
x01,x02,x03
– расстояния от оси симметрии до первой,
второй и третьей секций, x04
– расстояние от оси симметрии до общей
стороны (до обратных проводников).
Подбором этих параметров, можно
скомпенсировать три члена ряда (2.5.21) –
третьего, пятого и седьмого порядков.
Значения параметров были получены путем решения системы урав-нений
 (2.5.23)
(2.5.23)
Полученные
результаты ( )
не позволяют построить градиентную
систему, так как в этом случае локаль-ный
метод не учитывает конечную длину секций
и влияние боковых про-водников. Однако
влияние этих факторов невелико и
положения секций можно использовать в
качестве начальных при дальнейшем
уточнении положения секций, оптимизируя
параметры.
)
не позволяют построить градиентную
систему, так как в этом случае локаль-ный
метод не учитывает конечную длину секций
и влияние боковых про-водников. Однако
влияние этих факторов невелико и
положения секций можно использовать в
качестве начальных при дальнейшем
уточнении положения секций, оптимизируя
параметры.
Рис. 2.5.11. Область линейности поля системы поперечного градиента
В
результате расчета, с учетом конечной
длины всех проводников по формулам
(2.2.27 – 2.2.28), получены следующие значения
положений секций: центр общей стороны
секций должен находиться на расстоянии
 (рис.2.5.10), а параллельные ей стороны
секций – на расстояниях
(рис.2.5.10), а параллельные ей стороны
секций – на расстояниях
 .
Если секции катушек содержат более
одного витка, то в указанных точках
должны располагаться центры секций.
При этом область с нелинейностью
градиента ±1% составляет 0.95L
вдоль оси X,
0.80L
вдоль оси Y и 0.56L
вдоль оси Z.
.
Если секции катушек содержат более
одного витка, то в указанных точках
должны располагаться центры секций.
При этом область с нелинейностью
градиента ±1% составляет 0.95L
вдоль оси X,
0.80L
вдоль оси Y и 0.56L
вдоль оси Z.
На рис.2.5.11 показаны области градиентного поля с нелинейностями 1, 2 и 5% в плоскостях OZX, OZY, OXY. Конфигурация области линейности градиента подтверждает полученные результаты.
23. Способ формирования радиочастотных импульсов. Резонансные индуктивности, используемые для возбуждения и регистрации МР-сигналов, их модификации для оптимального использования в медицинской практике.
Способ формирования РЧ-импульсов. Чтобы возбудить спиновую систему, можно непрерывно воздействовать на спины электромагнитным полем подходящей частоты. Однако, обычно для возбуждения атомных ядер, находящихся в постоянном магнитном поле, воздействуют радиочастотным магнитным полем, интенсивность которого в коротком промежутке времени очень велика (импульсный магнитный резонанс). Частота этого поля должна быть равна или близка к частоте Лармора. При этом во вращающейся системе координат (рис. 1-8 вверху) направление намагниченности отклоняется от направления внешнего магнитного поля (рисунок 1-8 внизу).
Вверху: Ядра, помещенные во внешнее МП, прецессируют по двум противоположным конусам. При равновесии чуть большее число спинов прецессирует вокруг направления поля В0 (вверху слева). Это эквивалентно наличию одного стационарного магнитного момента М0, направленного вдоль В0 (вверху справа). Внизу: полсе облучения РЧ-импульсом с соответствующей частотой заполнения, намагниченность М0 отклоняется от ее равновесной ориентации. Внизу слева, такой импульс отклонил М0 на 90º, его так называют 90º импульсом. Если импульс длится вдвое дольше, то получается 180 импульс, который инвертирует намагниченность.
В наиболее распространенной на практике модификации известного способа для возбуждения сигналов от исследуемого объекта используют следующие импульсы: - 90-градусный радиочастотный импульс с ориентацией вектора перпендикулярно направлению магнитного поля при наличии селективного градиента магнитного поля по оси Z, - фазокодирующий градиент магнитного поля по оси Y (циклически изменяемый по амплитуде после запуска очередного 90-градусного радиоимпульса), - 180-градусный импульс или используют знакопеременные градиенты для формирования сигнала спинового эха, - частотокодирующий градиент магнитного поля по оси X с одновременной цифровой регистрацией эхо-сигнала.
Импульсная последовательность – набор РЧ- и градиентных импульсов, обычно неоднократно повторяемых в ходе сканирования, интервал между которыми и форма которых определяют характеристики изображения.
ИП подразделяют на 1) спин-эхо последовательности (SE, FSE, FRFSE) 2) градиент-эхо последовательности (GRE, SPGR, FIESTA) 3) последовательности с подавлением сигналов (STIR, FATSAT, FLAIR).
О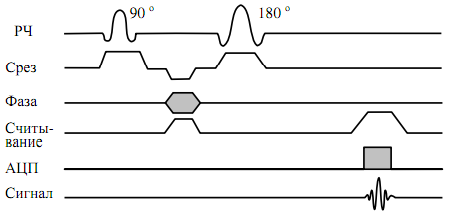 сновные
параметры ИП: TR
– время повторения последовательности,
TE
– время появления эхо-сигнала, TI
– время инверсии (интервал между инверт.
и 90˚-ным импульсом, ETL
– длина эхо-трейна, BW
– ширина полосы пропускания, FA
– угол отклонения, NEX
– число усреднений.
сновные
параметры ИП: TR
– время повторения последовательности,
TE
– время появления эхо-сигнала, TI
– время инверсии (интервал между инверт.
и 90˚-ным импульсом, ETL
– длина эхо-трейна, BW
– ширина полосы пропускания, FA
– угол отклонения, NEX
– число усреднений.