

§ 22.3. Основные схемы и параметры нереверсивных магнитных усилителей
Проследим
пути магнитных потоков в обоих сердечниках
магнитного усилителя, изображенного
на рис. 22.7. Магнитные потоки обмотки
управления
![]() в
соседних стержнях направлены в одну
сторону, а магнитные потоки рабочей
обмотки
в
соседних стержнях направлены в одну
сторону, а магнитные потоки рабочей
обмотки![]() —в
противоположные стороны. Поэтому
обмотку управления можно выполнять
не в виде двух секций (по одной на каждом
сердечнике),
—в
противоположные стороны. Поэтому
обмотку управления можно выполнять
не в виде двух секций (по одной на каждом
сердечнике),
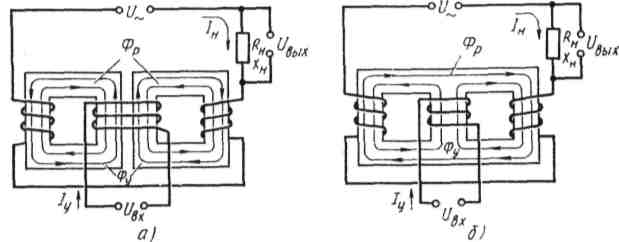
Рис. 22.8. Магнитные усилители с общей обмоткой управления
а
общей — охватывающей стержни обоих
сердечников (рис. 22.8, а).
ЭДС,
наведенные переменными магнитными
потоками Ф ~ в секциях рабочей обмотки,
расположенных на крайних стержнях,
взаимно компенсируются. Возможно и
выполнение магнитных усилителей на
Ш-образном сердечнике (рис. 22.8, б). Секции
рабочей обмотки наматываются на крайних
стержнях, а обмотка управления— на
среднем стержне. В этом случае в среднем
стержне происходит компенсация
переменного потока
![]() ,
поскольку потоки от каждой секции
рабочей обмотки направлены в среднем
стержне навстречу друг другу и равны
по величине. Поэтому выходной сигнал
не будет влиять на входной.
,
поскольку потоки от каждой секции
рабочей обмотки направлены в среднем
стержне навстречу друг другу и равны
по величине. Поэтому выходной сигнал
не будет влиять на входной.
Нет принципиальной разницы между выполнением магнитного усилителя на одном Ш-образном или на двух сердечниках. Поэтому при дальнейшем рассмотрении будем изображать только схемы соединения обмоток, отмечая при необходимости согласное и встречное включение секций обмоток с помощью точек, указывающих начало обмотки.
В зависимости от соединения секций рабочей обмотки и нагрузки различают схемы с последовательной и параллельной нагрузкой. На рис. 22.7 и 22.8 нагрузка включается последовательно с рабочей обмоткой. Диаграммы ЭДС для такой схемы показаны на рис. 22.9. Ток нагрузки в этом случае будет синусоидален, поскольку при неизменном входном сигнале в каждом из полупериодов питающего напряжения рабочий поток одной секции скла-
![]() рабочей
обмотки будет постоянна при неизменном
входном сигнале. Мгновенное значение
тока нагрузки
рабочей
обмотки будет постоянна при неизменном
входном сигнале. Мгновенное значение
тока нагрузки
![]()
где![]() и
и![]() —
активное и индуктивное сопротивления
нагрузки соответственно;
—
активное и индуктивное сопротивления
нагрузки соответственно;
![]() и
и
![]() —активное
и индуктивное сопротивления рабочей
обмотки (обеих секций);
—активное
и индуктивное сопротивления рабочей
обмотки (обеих секций);
![]()
При неизменном входном сигнале все сопротивления неизменны и ток имеет синусоидальную форму.
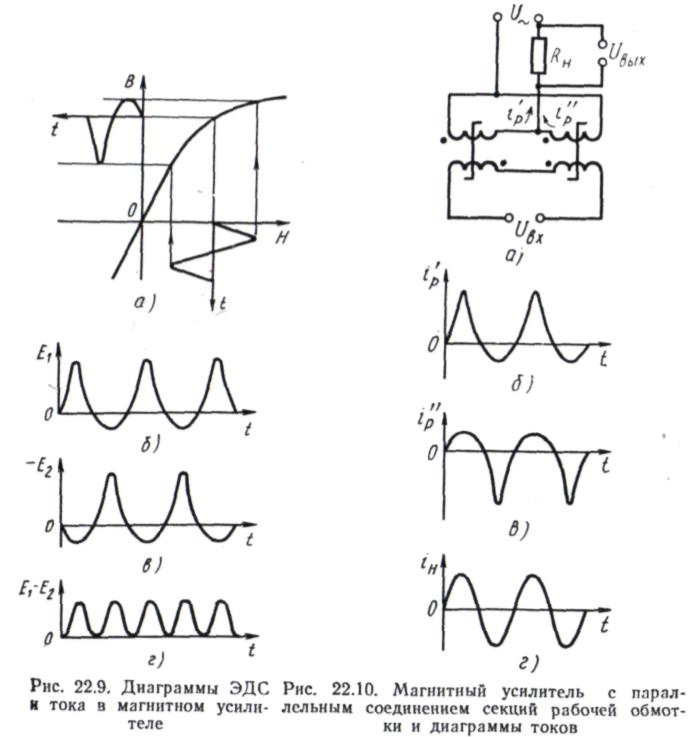
Синусоидальный
ток рабочей обмотки создает в сердечнике
синусоидальную напряженность поля
![]() ,
что, в свою очередь, приводит к
несинусоидальному потоку. Кривая
изменения индукции в одном периоде
получена графически на рис. 22.9, а.
Как
видно из диаграмм мгновенных значений
(рис. 22.9, б,
в), ЭДС,
создаваемые несинусоидальными
потоками разных секций рабочей обмотки
в обмотке управления, не уничтожаются
полностью. Это приводит к появлению в
обмотке управления ЭДС двойной частоты
,
что, в свою очередь, приводит к
несинусоидальному потоку. Кривая
изменения индукции в одном периоде
получена графически на рис. 22.9, а.
Как
видно из диаграмм мгновенных значений
(рис. 22.9, б,
в), ЭДС,
создаваемые несинусоидальными
потоками разных секций рабочей обмотки
в обмотке управления, не уничтожаются
полностью. Это приводит к появлению в
обмотке управления ЭДС двойной частоты
![]() (рис.
22.9, г).
В
тех случаях, когда наличие ЭДС двойной
частоты в цепи управления нежелательно,
предпочтение следует отдать
параллельному соединению секций рабочей
обмотки.
(рис.
22.9, г).
В
тех случаях, когда наличие ЭДС двойной
частоты в цепи управления нежелательно,
предпочтение следует отдать
параллельному соединению секций рабочей
обмотки.
При параллельном соединении секций рабочей обмотки (рис. 22.10, а) в каждой из них протекает несинусоидальный ток, содержащий четные гармоники (рис. 22.10, б, в). Однако ток нагрузки, представляющий собой сумму токов секций, близок к синусоидальному (рис. 22.10, г). Это объясняется тем, что четные гармоники тока циркулируют в короткозамкнутом контуре, образованном секциями рабочей обмотки, и не выходят в цепь нагрузки. Наличие короткозамкнутого контура в цепи рабочей обмотки приводит к уменьшению быстродействия по сравнению с последовательным соединением секций рабочей обмотки.
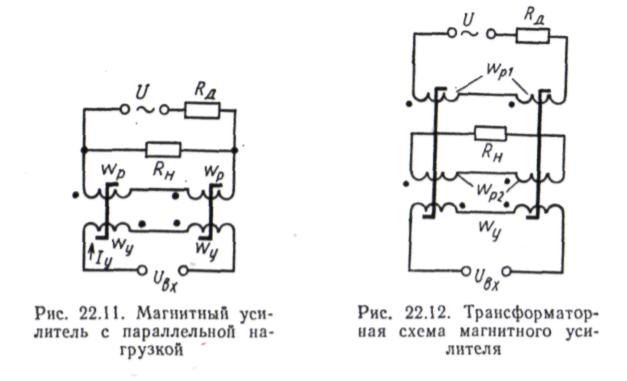
Схема
магнитного усилителя, в которой нагрузка
включена параллельно секциям рабочей
обмотки, соединенным встречно, показана
на рис. 22.11. Для поддержания неизменным
тока питания используется достаточно
большое добавочное сопротивление
![]() В зависимости от входного сигнала
происходит перераспределение токов
между нагрузкой и рабочей обмоткой. При
отсутствии управляющего сигнала (
В зависимости от входного сигнала
происходит перераспределение токов
между нагрузкой и рабочей обмоткой. При
отсутствии управляющего сигнала (![]() )
индуктивное сопротивление рабочей
обмотки
)
индуктивное сопротивление рабочей
обмотки
![]() максимально,
вследствие чего в рабочую обмотку
ответвляется незначительный ток. При
этом ток в нагрузке имеет максимальное
значение. По мере увеличения входного
сигнала индуктивное сопротивление
рабочей обмотки уменьшается, а ток в
ней возрастает, что приводит к уменьшению
тока нагрузки.
максимально,
вследствие чего в рабочую обмотку
ответвляется незначительный ток. При
этом ток в нагрузке имеет максимальное
значение. По мере увеличения входного
сигнала индуктивное сопротивление
рабочей обмотки уменьшается, а ток в
ней возрастает, что приводит к уменьшению
тока нагрузки.
Аналогично
происходит изменение тока в нагрузке
в так называемой трансформаторной
схеме (рис. 22.12). Здесь помимо секций
обмотки
![]() ,
включенных встречно через добавочное
сопротивление
,
включенных встречно через добавочное
сопротивление
![]() на
напряжение источника питания
на
напряжение источника питания
![]() ,
имеется обмотка
,
имеется обмотка
![]() ,
питающая нагрузку
,
питающая нагрузку
![]() .
Такая схема позволяет изолировать
цепь нагрузки от цепи питания и получать
на нагрузке практически любое напряжение,
отличное от напряжения питания. Ток
в нагрузке зависит от коэффициента
трансформации обмоток, под которым
в данном случае понимается отношение
напряжений на обмотках
.
Такая схема позволяет изолировать
цепь нагрузки от цепи питания и получать
на нагрузке практически любое напряжение,
отличное от напряжения питания. Ток
в нагрузке зависит от коэффициента
трансформации обмоток, под которым
в данном случае понимается отношение
напряжений на обмотках![]() и
и
![]() .
.
 Этот
коэффициент не остается постоянным,
как в обычном трансформаторе, а зависит
от сигнала
управления, изменяющего магнитную
проницаемость. При отсутствии
управляющего сигнала (
Этот
коэффициент не остается постоянным,
как в обычном трансформаторе, а зависит
от сигнала
управления, изменяющего магнитную
проницаемость. При отсутствии
управляющего сигнала (![]() )
магнитная проницаемость
)
магнитная проницаемость
и
индуктивность обмоток имеют максимальное
значение и падение напряжения на этих
обмотках велико. Коэффициент трансформации
будет максимален, и соответственно ток
нагрузки
![]() имеет
максимальное значение. При увеличении
входного сигнала индуктивность обмотки
wpi
уменьшается.
Соответственно уменьшаются коэффициент
трансформации, напряжение па обмотке
имеет
максимальное значение. При увеличении
входного сигнала индуктивность обмотки
wpi
уменьшается.
Соответственно уменьшаются коэффициент
трансформации, напряжение па обмотке
![]() и
ток нагрузки
и
ток нагрузки![]() Схема с параллельным соединением
нагрузки по рис. 22.11 применяется чаще
всего тогда, когда имеется источник
тока, например в схемах автоматики,
питаемых от трансформаторов тока.
Применение источника напряжения
и использование добавочного сопротивления
Схема с параллельным соединением
нагрузки по рис. 22.11 применяется чаще
всего тогда, когда имеется источник
тока, например в схемах автоматики,
питаемых от трансформаторов тока.
Применение источника напряжения
и использование добавочного сопротивления
![]() экономически
невыгодно из-за больших потерь в этом
сопротивлении. Трансформаторные
магнитные усилители с параллельной
нагрузкой широко используют как элементы
реверсивных схем магнитных усилителей
(см. гл. 24).
экономически
невыгодно из-за больших потерь в этом
сопротивлении. Трансформаторные
магнитные усилители с параллельной
нагрузкой широко используют как элементы
реверсивных схем магнитных усилителей
(см. гл. 24).
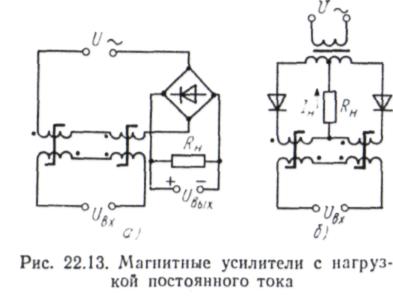
Все рассмотренные схемы магнитных усилителей (см. рис. 22.7—22.12) питали нагрузку переменным током. При необходимости питать нагрузку постоянным током используются выпрямительные схемы. В качестве примера включения нагрузки постоянного тока на рис. 22.13, а приведена схема с последовательным включением выпрямительного моста и нагрузки. Магнитный усилитель с выходным постоянным током может использовать и двух-полупериодную схему па двух диодах и трансформаторе с выводом от средней точки вторичной обмотки (рис. 22.13, б).