

§ 6.2. Принцип действия и основы расчета индуктивных датчиков
Простейший индуктивный датчик представляет собой дроссель с переменным воздушным зазором в магнитопроводе. На рис. 6.1 показаны две наиболее распространенные конструктивные схемы индуктивных датчиков на одном сердечнике. Это одинарные индуктивные датчики. На сердечнике 1 из электротехнической стали размещена обмотка 2, подключаемая к источнику переменного напряжения. Магнитный поток в сердечнике замыкается через якорь 3, который может перемещаться относительно сердечника 2. Якорь 3 механически связан с деталью, перемещение которой необходимо измерить.
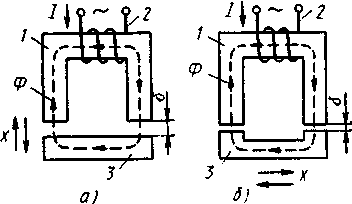
Рис.
6.1. Простые индуктивные датчики
Эта деталь на рисунке не показана, но перемещение х ее может происходить в вертикальном (рис. 6.1, а) или в горизонтальном направлении (рис. 6.1, б). Перемещение якоря изменяет магнитное сопротивление магнитной цепи, состоящей из сердечника, якоря и воздушного зазора б. Следовательно, изменится индуктивность обмотки 2. Поскольку эта обмотка включена на переменное напряжение, ток в обмотке 2 будет определяться ее полным сопротивлением, в которое входит и индуктивное сопротивление. С увеличением воздушного зазора магнитное сопротивление увеличивается, а индуктивность, индуктивное и полное сопротивления уменьшаются (рис. 6.2, а). Следовательно, ток в обмотке увеличивается (рис. 6.2, б). Полагая ток I в обмотке за выходной сигнал датчика, а перемещение х — за входной сигнал, имеем выходную характеристику в виде графика I=f(x)
Найдем
выражение, определяющее зависимость
тока в обмотке датчика
от перемещения. Анализ проведем
применительно к конструктивной
схеме, показанной на рис. 6.1, а.
В
этом случае приращение перемещения
х
всегда
равно приращению зазора б, поэтому нам
необходимо получить математическую
зависимость тока![]() от
от
![]()
Пусть
обмотка датчика включена
на напряжение питания;
![]() где
где
![]() —
действующее
значение напряжения,
—
действующее
значение напряжения,
![]() —
угловая частота, рад/с.
По закону Ома, действующее
значение тока в обмотке
—
угловая частота, рад/с.
По закону Ома, действующее
значение тока в обмотке
![]() (6.1)
(6.1)
Рис.
6.2. Характеристики индуктивного
датчика![]() —
полное сопротивление обмотки
датчика, Ом, состоящее из активного R
и
индуктивного
—
полное сопротивление обмотки
датчика, Ом, состоящее из активного R
и
индуктивного
![]() сопротивлений:
сопротивлений:![]() Индуктивное
сопротивление
Индуктивное
сопротивление![]() пропорционально
индуктивности L
и
частоте питания
пропорционально
индуктивности L
и
частоте питания
![]() :
Xl=
:
Xl=
![]() (Напомним,
что
(Напомним,
что![]() )
После подстановки имеем
)
После подстановки имеем
![]() (6.2)
(6.2)
Индуктивность обмотки датчика с числом витков w
![]() (6.3)
(6.3)
Где
![]() —магнитный
поток сердечника, Вб. Принимаем, что
весь магнитный
поток проходит через воздушный зазор,
т. е. потоки рассеяния
отсутствуют. Тогда
—магнитный
поток сердечника, Вб. Принимаем, что
весь магнитный
поток проходит через воздушный зазор,
т. е. потоки рассеяния
отсутствуют. Тогда
![]() (6.4)
(6.4)
Здесь
![]() —
магнитное сопротивление магнитопровода
датчика, Гн. Это
сопротивление слагается из сопротивления
стали сердечника и
якоря
—
магнитное сопротивление магнитопровода
датчика, Гн. Это
сопротивление слагается из сопротивления
стали сердечника и
якоря![]() и
сопротивления воздушного зазора
и
сопротивления воздушного зазора![]() :
:
![]() (6.5)
(6.5)
Сопротивление
воздушного зазора пропорционально
удвоенной длине воздушного зазора![]() ,
поскольку магнитный поток проходит
через
воздушный зазор дважды:
,
поскольку магнитный поток проходит
через
воздушный зазор дважды:
![]() (6.6)
(6.6)
где![]() —
поперечное сечение воздушной части
магнитопровода, равное
активной площади поперечного сечения
сердечника в зоне
душного зазора, м2;
—
поперечное сечение воздушной части
магнитопровода, равное
активной площади поперечного сечения
сердечника в зоне
душного зазора, м2;![]() Гн/м
— магнитная проницаемость воздуха.
Гн/м
— магнитная проницаемость воздуха.
После подстановки (6.5) и (6.6) в (6.4) получим выражение для магнитного потока:
Выражение
для индуктивности![]() получаем
подстановкой (6.7) в (6.3):
получаем
подстановкой (6.7) в (6.3):
![]() (6.8)
(6.8)
Индуктивное сопротивление обмотки
![]() (6.9)
(6.9)
![]() (6.10)
(6.10)
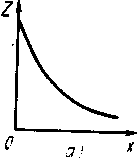
Анализ
формулы (6.10) показывает, что с увеличением
воздушного
зазора (а следовательно, и перемещения)
полное сопротивление
уменьшается, стремясь в пределе к
величине активного сопротивления
обмотки R.
Зависимость
полного сопротивления![]() от
величины
зазора б показана на рис. 6.2, а.
Ток
в обмотке датчика
от
величины
зазора б показана на рис. 6.2, а.
Ток
в обмотке датчика

Если
входным сигналом датчика считать
перемещение якоря х
от
начального положения при![]() в
сторону увеличения зазора (по рис.
6.1, а),
то
формула после замены
в
сторону увеличения зазора (по рис.
6.1, а),
то
формула после замены![]() на
на![]() представляет
собой статическую
характеристику одинарного индуктивного
датчика, т. е.
представляет
собой статическую
характеристику одинарного индуктивного
датчика, т. е.![]() .
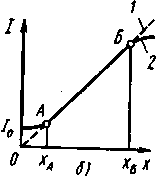
График статической характеристики
показан на рис.6.2,
б.
Как
видно из анализа формулы (6.11) и графика,
зависимость
.
График статической характеристики
показан на рис.6.2,
б.
Как
видно из анализа формулы (6.11) и графика,
зависимость![]() имеет
нелинейный характер. Однако на графике
можно
выделить участок АБ,
на
котором соблюдается прямая
пропорциональность
между входным и выходным сигналами.
Этот участок
называется рабочим, датчик используется
именно в диапазоне
входных сигналов от
имеет
нелинейный характер. Однако на графике
можно
выделить участок АБ,
на
котором соблюдается прямая
пропорциональность
между входным и выходным сигналами.
Этот участок
называется рабочим, датчик используется
именно в диапазоне
входных сигналов от
![]() до
до
![]() Следовательно,
датчик всегда имеет
некоторый воздушный зазор, не меньший
Следовательно,
датчик всегда имеет
некоторый воздушный зазор, не меньший![]() .
В большинстве конструкций индуктивных
датчиков магнитопровод ненасыщен и
магнитная
проницаемость материала сердечника
весьма велика. Поэтому
магнитное сопротивление воздушного
зазора (уже при
.
В большинстве конструкций индуктивных
датчиков магнитопровод ненасыщен и
магнитная
проницаемость материала сердечника
весьма велика. Поэтому
магнитное сопротивление воздушного
зазора (уже при
![]() )
значительно больше магнитного
сопротивления стального сердечника,
т. е.
)
значительно больше магнитного
сопротивления стального сердечника,
т. е.![]()
Пренебрегая
величиной
![]() в
формуле (6.9), получаем упрощенное
выражение для индуктивного сопротивления
(с учетом
в
формуле (6.9), получаем упрощенное
выражение для индуктивного сопротивления
(с учетом
![]() ):
):
![]() (6.12)
(6.12)
В
этом же диапазоне изменения воздушного
зазора от![]() до
до![]() активное
сопротивление
активное
сопротивление![]() значительно
меньше индуктивного сопротивления
значительно
меньше индуктивного сопротивления![]()
Пренебрегая
в (6.2) величиной![]() ,
с учетом (6.12) получаем приближенное
выражение статической характеристики
индуктивного датчика
,
с учетом (6.12) получаем приближенное
выражение статической характеристики
индуктивного датчика
![]() (6.13)
(6.13)
где R— коэффициент передачи, определяемый напряжением и частотой питания, конструктивными размерами сердечника и числом витков обмотки датчика;
![]()
Таким
образом, в некотором диапазоне изменения
входного сигнала![]() статическая
характеристика индуктивного датчика
является
линейной с постоянным коэффициентом
передачи.
статическая
характеристика индуктивного датчика
является
линейной с постоянным коэффициентом
передачи.
График такой статической характеристики имеет вид прямой линии (штриховая на рис. 6.2, б). Это идеальная характеристика датчика. Реальная характеристика (сплошная линия 2 на рис. 6.2, б) совпадает с идеальной на рабочем участке АБ. Проанализируем причины отклонения реальной характеристики от идеальной.
В
зоне![]() воздушный
зазор очень мал и его магнитное
сопротивление
становится соизмеримым с магнитным
сопротивлением стальных
сердечника и якоря. Реальная характеристика
начинается не
от нуля, поскольку даже при
воздушный
зазор очень мал и его магнитное
сопротивление
становится соизмеримым с магнитным
сопротивлением стальных
сердечника и якоря. Реальная характеристика
начинается не
от нуля, поскольку даже при![]() индуктивное
сопротивление не может
быть равно бесконечности. Следовательно,
некоторый ток будет
протекать по обмотке, выполненной даже
на замкнутом магнитопроводе.
Для уменьшения значения начального
тока
индуктивное
сопротивление не может
быть равно бесконечности. Следовательно,
некоторый ток будет
протекать по обмотке, выполненной даже
на замкнутом магнитопроводе.
Для уменьшения значения начального
тока![]() используют
для сердечника и якоря индуктивного
датчика материалы с высоким
значением магнитной проницаемости.
используют
для сердечника и якоря индуктивного
датчика материалы с высоким
значением магнитной проницаемости.
В
зоне
![]() индуктивное
сопротивление обмотки уже настолько
уменьшается, что становится соизмеримым
с активным сопротивлением
обмотки, которое и ограничивает нарастание
тока. Следует также
отметить, что при больших зазорах часть
магнитного потока уже не замыкается
через якорь, а замыкается непосредственно
по воздуху.
индуктивное
сопротивление обмотки уже настолько
уменьшается, что становится соизмеримым
с активным сопротивлением
обмотки, которое и ограничивает нарастание
тока. Следует также
отметить, что при больших зазорах часть
магнитного потока уже не замыкается
через якорь, а замыкается непосредственно
по воздуху.
На практике диапазон изменения воздушного зазора для индуктивных датчиков по рис. 6.1, а не превышает 4—5 мм. Значительно больший диапазон изменения входного сигнала (перемещения) имеют индуктивные датчики по рис. 6.1, б. Такие датчики имеют близкую к линейной статическую характеристику при перемещениях якоря до 10—15 мм.
Величину
начального воздушного зазора![]() (т.
е. исходное положение
якоря, при котором входной сигнал равен
нулю) рекомендуется
выбирать в середине линейного участка
статической характеристики
датчика. Оценим чувствительность
индуктивного датчика
при включении его в одно плечо мостовой
измерительной схемы
в качестве переменного сопротивления.
Питание моста осуществляется
напряжением переменного тока. В этом
случае чувствительность представляет
собой относительное изменение
сопротивления,
деленное на приращение величины
воздушного зазора:
(т.
е. исходное положение
якоря, при котором входной сигнал равен
нулю) рекомендуется
выбирать в середине линейного участка
статической характеристики
датчика. Оценим чувствительность
индуктивного датчика
при включении его в одно плечо мостовой
измерительной схемы
в качестве переменного сопротивления.
Питание моста осуществляется
напряжением переменного тока. В этом
случае чувствительность представляет
собой относительное изменение
сопротивления,
деленное на приращение величины
воздушного зазора:
![]() (6.14)
(6.14)
где![]() —приращение
величины воздушного зазора, вызывающее
изменение
полного сопротивления обмотки датчика
—приращение
величины воздушного зазора, вызывающее
изменение
полного сопротивления обмотки датчика![]() на
на![]()
Пренебрегая![]() имеем
имеем![]() .
Возьмем производную полного сопротивления
по перемещению при
.
Возьмем производную полного сопротивления
по перемещению при![]()
![]() (6.15)
(6.15)
Подставим
в (6.15) значение индуктивности из (6.9),
пренебрегая![]() :
:
![]()
или, переходя к конечным приращениям,
![]() (6.16)
(6.16)
Поделив
(6.16) на![]() получим
выражение для чувствительности:
получим
выражение для чувствительности:
![]() (6.17)
(6.17)
С
увеличением зазора чувствительность
датчика резко уменьшается.
А при выборе в качестве начальной точки
малой величины зазора
можно получить большую чувствительность
и значительный сигнал разбаланса
мостовой схемы, что позволяет в ряде
случаев отказаться
от использования усилителя на выходе
моста. Например,
при
![]() мм
и
мм
и
![]() мм
чувствительность
мм
чувствительность![]()
![]() и
относительное изменение сопротивления
и
относительное изменение сопротивления![]()
![]() т.
е. при изменении зазора на 0,1 мм
сопротивление
датчика изменяется на
т.
е. при изменении зазора на 0,1 мм
сопротивление
датчика изменяется на![]() .
.
Одним из недостатков одинарного индуктивного датчика является то, что на его якорь действует сила притяжения к сердечнику.
Эта
сила вносит погрешность в работу датчика
тем большую, чем меньше
перестановочное усилие детали, перемещение
которой надо измерить.
Индуктивный датчик представляет собой
электромагнит, тяговая сила которого,
как известно из электротехники,
пропорциональна
производной магнитной энергии![]() по
перемещению:
по
перемещению:
![]() (6.18)
(6.18)
Знак минус означает, что сила направлена в сторону, соответствующую уменьшению магнитной энергии. Энергия магнитного поля катушки с током
![]() (6.19)
(6.19)
Если сделать те же допущения, что и при выводе уравнения статической характеристики датчика (6.13), то для электромагнитной силы, воздействующей на якорь, можно записать уравнение
![]() (6.20)
(6.20)
Анализ
уравнения (6.20) показывает, что в рабочем
диапазоне входных
перемещений при принятых допущениях
электромагнитная
сила притяжения не зависит от зазора![]() .
Эта сила пропорциональна
квадрату напряжения питания и обратно
пропорциональна
частоте питания. Повышение частоты
питания снижает силу
притяжения, но ухудшает точность работы
датчика, поскольку
возрастают потери в стали из-за вихревых
токов.
.
Эта сила пропорциональна
квадрату напряжения питания и обратно
пропорциональна
частоте питания. Повышение частоты
питания снижает силу
притяжения, но ухудшает точность работы
датчика, поскольку
возрастают потери в стали из-за вихревых
токов.
Кроме наличия электромагнитной силы притяжения индуктивные датчики имеют также и другие серьезные недостатки: при изменении знака входного сигнала не меняется знак выходного сигнала (т. е. датчик не является реверсивным); диапазон изменения входного сигнала, при котором сохраняется линейность статической характеристики, невелик.
Указанные недостатки ограничивают область применения одинарных индуктивных датчиков. На практике они нашли применение в качестве бесконтактных датчиков положения и концевых выключателей при управлении механизмами, имеющими значительные перестановочные усилия. В таких схемах автоматики наиболее полно проявляются достоинства одинарных индуктивных датчиков: простота конструкции и высокая надежность.