

§ 11.2. Устройство струнных датчиков
Для обеспечения требуемой точности, чувствительности и надежности струнных датчиков необходимо выбрать соответствующий материал струны. Этот выбор определяется как условиями применения датчика, так и способом возбуждения колебаний струны. К материалу струны предъявляются следующие требования: высокая прочность при вибрационных нагрузках, определенное значение температурного коэффициента линейного расширения (либо малое, либо равное этому же коэффициенту конструкционного материала датчика), независимость упругих свойств от времени и температуры.
Возможно применение как ферромагнитных, так и неферромагнитных материалов струны. При использовании ферромагнитной струны применяются электромагнитные возбудители колебаний. Под действием тока, протекающего по обмотке неподвижного электромагнита, к струне прикладывается сила притяжения, выводящая ее из состояния покоя. При использовании неферромагнитной струны применяются магнитоэлектрические возбудители колебаний. При пропускании через струну тока она испытывает силу притяжения (или отталкивания) к полюсам постоянного магнита.
Наибольшее распространение в струнных датчиках с электромагнитным возбуждением получили стальные струны из круглой рояльной проволоки диаметром 0,1—0,3 мм. При длине в 40—60 мм в таких струнах возбуждаются колебания с частотой 700—2000 Гц. В последнее время используются более гибкие и поддающиеся более надежному креплению стальные ленты толщиной 0,08—0,1 мм и шириной 1—2 мм. Частота колебаний стальной ленты достигает 3 кГц и выше. Стальные струны и ленты работают в режиме заданной длины. В этом режиме струна крепится к относительно более массивному упругому первичному преобразователю, изготовленному также из стали. Одинаковый температурный коэффициент линейного расширения материала струны и материала конструкции датчика позволяет уменьшить температурную погрешность.
В режиме заданной длины струна очень чувствительна к нестабильности крепления, а при использовании неферромагнитных струн обычно требуется изолировать хотя бы один из концов струны, что ухудшает механическую стабильность крепления. Поэтому неферромагнитные струны обычно используют в режиме заданной силы. В качестве материала применяют бериллиевую бронзу, вольфрамовые сплавы, а также специальный железокобальтовый сплав. Струны из вольфрамовых сплавов бывают как круглыми, так и ленточными. Другие материалы обычно используют в виде лент.
При
выборе размеров струны исходят из
следующих противоречивых
требований. При малой длине уменьшаются
габариты датчиков,
повышаются чувствительность и
виброустончивость. Однако при
этом увеличивается погрешность из-за
несовершенства крепления
и влияния собственной жесткости струны.
Для обеспечения малой
погрешности от собственной жесткости
следует стремиться к
выполнению условия //d![]() ,
где / — длина струны, d
—
диаметр
круглой или толщина ленточной струны.
Обычно не рекомендуется
выбирать длину струны / менее 20 мм.
Сечение струны
выбирается по требуемому пределу
изменения натяжения и целесообразному
механическому напряжению в струне.
Например, для
бронзы рекомендуется выбирать напряжение
не более 0,5% от
модуля упругости.
,
где / — длина струны, d
—
диаметр
круглой или толщина ленточной струны.
Обычно не рекомендуется
выбирать длину струны / менее 20 мм.
Сечение струны
выбирается по требуемому пределу
изменения натяжения и целесообразному
механическому напряжению в струне.
Например, для
бронзы рекомендуется выбирать напряжение
не более 0,5% от
модуля упругости.
Конструкция и материал крепления струны играют первостепенную роль для обеспечения стабильности струнного датчика. При малых механических напряжениях (до 200 Н/мм2) более хорошие результаты дают способы крепления, показанные на рис. 11.2. Крепление с помощью винта (рис. 11.2, а) приводит к значительному смятию струны и ухудшению стабильности. Более хорошие результаты дает крепление в щели (рис. 11.2, б). Ленточные струны закрепляют между двумя хорошо обработанными и подогнанными параллельными плоскостями (рис. 11.2, в). Таким же способом можно крепить и круглые струны. Для высокоточных датчиков применяют более сложные конструкции крепления струны. Для снятия механических напряжений при установке крепления используют
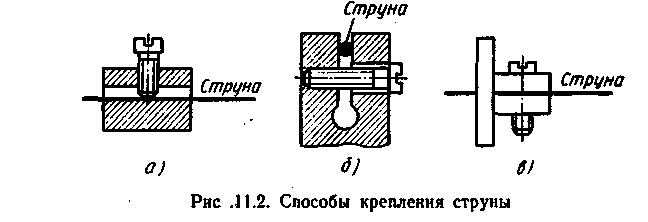
температурное старение в виде нескольких циклов нагрева до 80— 100°С (по 4—8 ч каждый).
С помощью струнных датчиков возможно автоматическое измерение силы, давления, перемещения, ускорения, температуры и других неэлектрических величин. На базе струнных датчиков созданы также цифровые электроизмерительные приборы постоянного
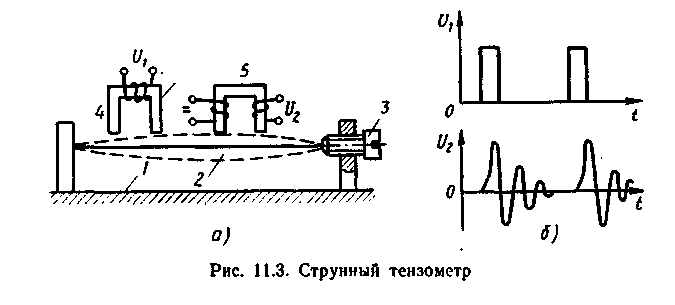
и переменного тока. Диапазон изменения выходного сигнала — частоты— составляет 300—500 Гц. Для исключения помех промышленной частоты стремятся увеличить минимальное значение частоты. Высокая частота облегчает и преобразование ее в цифровой код. Например, для получения погрешности дискретности счета, не превышающей 0,1%, при частоте в 1000 Гц достаточно производить счет импулсьов выходного сигнала датчика в течение 1 с. Наибольшее распространение получили струнные тензометры. Рассмотрим схему измерения с помощью струнного тензометра (рис. 11.3, а). В корпусе 1 закреплена струна 2, начальное натяжение которой может устанавливаться с помощью регулировочного винта 3. Колебания струны возбуждаются с помощью электромаг-■ нита 4. Выходной сигнал приемника 5, в качестве которого используется, например, электромагнитный трансформаторный датчик, измеряется частотомером. В струнных тензометрах применяются струны длиной 20—200 мм с начальным механическим напряжением 300—400 Н/мм2 и максимальным до 800 Н/мм2. С их помощью может быть обеспечена чувствительность измерения относительной
деформации в Ы0-6.
На рис. 11.3, б показаны диаграммы напряжения, подаваемого на обмотку электромагнита 4, и напряжения, снимаемого с приемника 5 в режиме работы по запросу. Периодически посылаются сигналы запроса в виде одиночного импульса, а сигнал ответа имеет вид затухающих колебаний с частотой /, определяемой силой, приложенной к струне. Как следует из уравнения (11.1), эта зависимость имеет нелинейный характер.
С помощью некоторых конструктивных мер можно уменьшить эту нелинейность. Но в датчиках с одной струной довольно трудно обеспечить нелинейность меньше чем 2—3% от диапазона
изменения частоты.
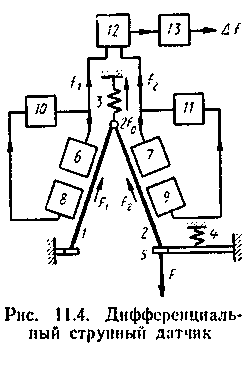
Для увеличения точности преобразования и повышения линейности используют двухструнные дифференциальные датчики. Преобразователь силы в частоту (рис. 11.4) состоит из двух струн
1 и 2, размещенных под малым углом друг к другу и натянутых с силой 2F0, создаваемой пружиной 3.
Пружина
4
уравновешивает
начальное натяжение F0
в
струне 2.
Измеряемая
сила F,
приложенная
к рычагу 5,
перераспределяет
суммарную силу натяжения 2F0,
увеличивая
натяжение F2
струны
2 и
уменьшая натяжение F1
струны
/. Под струнами 1
и 2 располо
жены
возбудители колебаний 6
и
7
и
приемники колебаний 8
и
9.
Приемники
подключены на вход усилителей 10
и
11,
а
возбудите
ли— на выход этих
усилителей. Напряжения с усилителей 10
и
I
1
с частотами соответственно fi
и f2
поступают на смеситель 12
и
фильтр
13,
на
выходе которого получается сигнал
разностной час
тоты
![]() Для
уменьшения нелинейности струна,
работающая
на укорочение, выбирается
несколько большей длины
Для
уменьшения нелинейности струна,
работающая
на укорочение, выбирается
несколько большей длины