

§ 17.9. Быстродействие электромагнитных реле
В § 17.2 в числе основных параметров электромагнитных реле были отмечены параметры, характеризующие быстродействие реле: время срабатывания tсp и время отпускания tотн- Эти параметры определяются при анализе переходных процессов, происходящих при включении и отключении реле. Рассмотрим эти процессы применительно к обмотке реле постоянного тока.
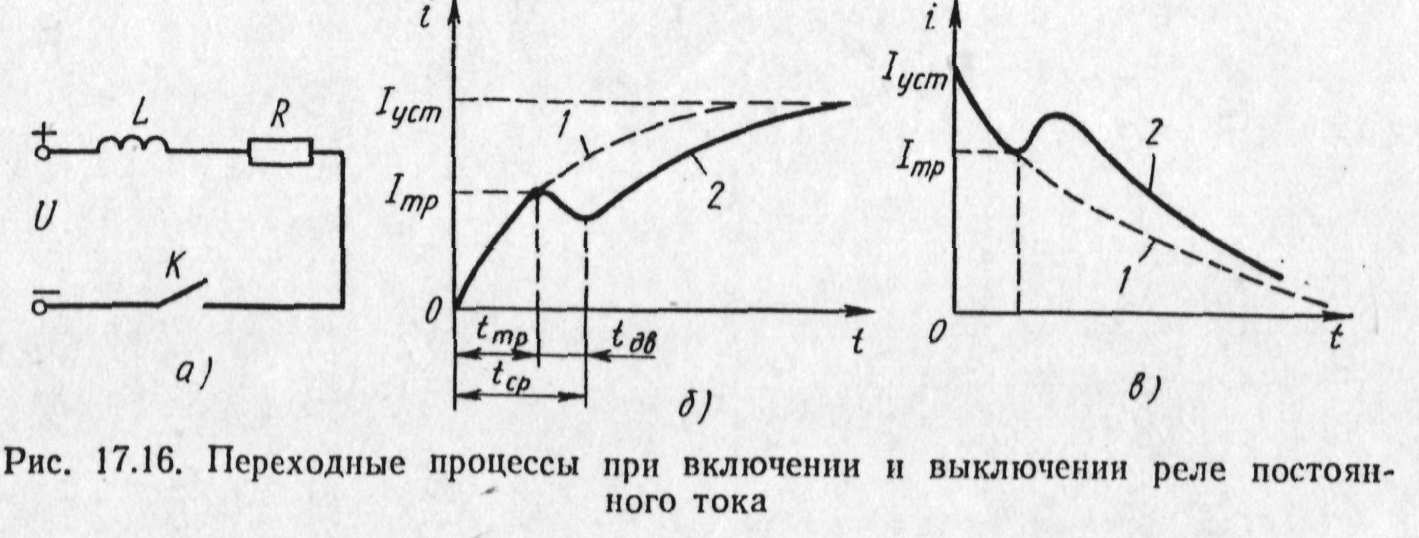
Цепь обмотки реле можно представить в виде последовательного соединения активного сопротивления R и индуктивности L. Переходный процесс при включении реле можно рассматривать как известный из электротехники случай включения катушки индуктивности на постоянное напряжение (рис. 17.16). С момента замыкания ключа К возникает переходный процесс, в течение которого ток в обмотке реле увеличивается от нуля до некоторого установившегося значения i=Iycт, изменяются и напряжения uR и uL. Электрическое состояние
цепи по схеме рис. 17.16 в любой момент переходного процесса характеризуется уравнением
![]()
Решение этого уравнения относительно тока имеет вид
![]()
где Lуст — U/R; T=L/R — постоянная времени цепи.
График зависимости i=f(t) представляет собой экспоненту (пунктирная кривая ) на рис. 17.16, б). Формула (17.31) получена в предположении, что индуктивность L обмотки реле постоянна. В действительности в процессе движения якоря к сердечнику индуктивность L увеличивается (аналогично работе электромагнитного индуктивного датчика перемещения, рассмотренного в гл. 6). Изменение индуктивности начинается с того момента времени, когда ток в обмотке достиг значения тока трогания (i=Iтр). Начинающееся увеличение индуктивности приводит к увеличению постоянной времени Т=L/R. Следовательно, рост тока замедляется. Кроме того, быстрое возрастание магнитного потока вызывает увеличение противо ЭДС, т. е. напряжения на индуктивности Ul. Это приводит даже к уменьшению на некоторое время тока в цепи (см. сплошную кривую 2 на рис. 17.16, б). Как только якорь притянется к сердечнику, индуктивность обмотки перестает увеличиваться и ток снова возрастает по экспоненте, но с меньшей скоростью, чем на начальном участке, поскольку увеличилась постоянная времени.
Время срабатывания реле tср определяется двумя составляющими (рис. 17.16, б): временем трогания tтp и временем движения tдв, т. е.
![]()
Величину времени трогания получим, подставляя в (17.31) значение
![]()
Откуда

т. е. время трогаиия пропорционально постоянной времени.
Время движения tдв зависит от механической инерционности электромагнитного механизма реле. Оно может быть определено на основании второго закона Ньютона a=F/m, где а — ускорение, т — масса. Для уменьшения времени движения необходимо стремиться к уменьшению массы якоря. Для данного типа реле можно считать величину tдв приблизительно постоянной. Поэтому основным фактором, влияющим на время срабатывания реле tср, является постоянная времени T=L/R.
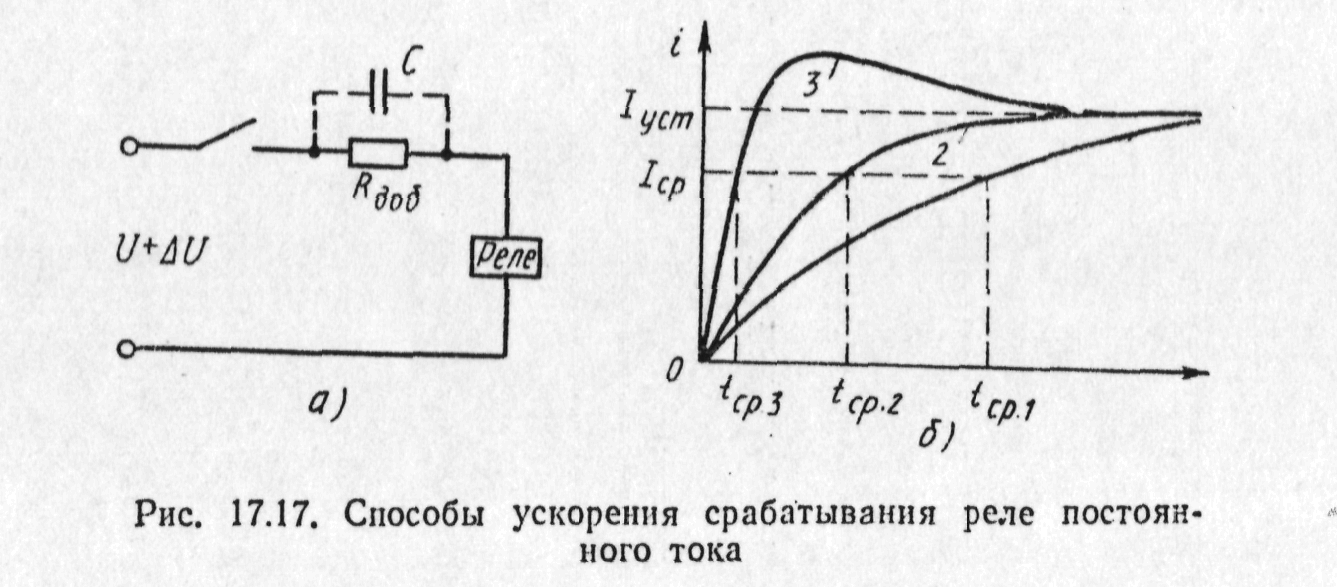
Рассмотрим способы ускорения срабатывания реле постоянного тока, основанные именно на изменении длительности переходного процесса. Последовательно с обмоткой реле включается добавочное активное сопротивление Rдоб (рис. 17.17), а напряжение питания повышается на величину U, которая выбрана таким образом, чтобы установившееся значение тока осталось неизменным, т. е.

ка будет происходить по более крутой экспоненте (кривая 2 на рис. 17.17,6), чем без добавочного сопротивления (кривая 1 па рис. 17.17,6).
Еще большее ускорение срабатывания реле можно получить подключив параллельно добавочному сопротивлению Rдоб конденсатор емкостью С (на рис. 17.17, а это включение показано пунктиром). При замыкании ключа К ток переходного процесса проходит через емкость в обход Rдоб. Ведь до замыкания ключа напряжение на конденсаторе было равно нулю, а скачком оно измениться не может. Поэтому в первый момент времени все повышенное напряжение приложено именно к катушке реле. В цепи появляется значительный ток, но он не опасен для обмотки, поскольку действует короткое время. По окончании переходного процесса ток уменьшается до установившегося значения, поскольку он проходит через Rдоб (через конденсатор постоянный ток не пооходит). Емкость конденсатора (в мкФ) выбирается из условия

Теперь рассмотрим переходный процесс при отключении реле. При размыкании ключа К (рис. 17.16, а) ток в обмотке реле уменьшается от значения /уст до нуля. Энергия, запасенная в магнитном поле обмотки реле, поддерживает некоторое время ток за счет дугового разряда между контактами ключа К Уравнение тока переходного процесса получим, решая дифференциальное уравнение (17.30) при U=0:
![]()
где T=L/R; L — индуктивность обмотки реле при притянутом якоре.
График зависимости i=f(t) показан на рис. 17.16, в в виде экспоненты (пунктирная кривая 1). Кривая 2 показывает реальное изменение тока в об-
мотке реле при отключении. Всплеск тока па этой кривом объясняется изменением индуктивности обмотки при движении якоря (аналогично всплеску тока при включении реле).
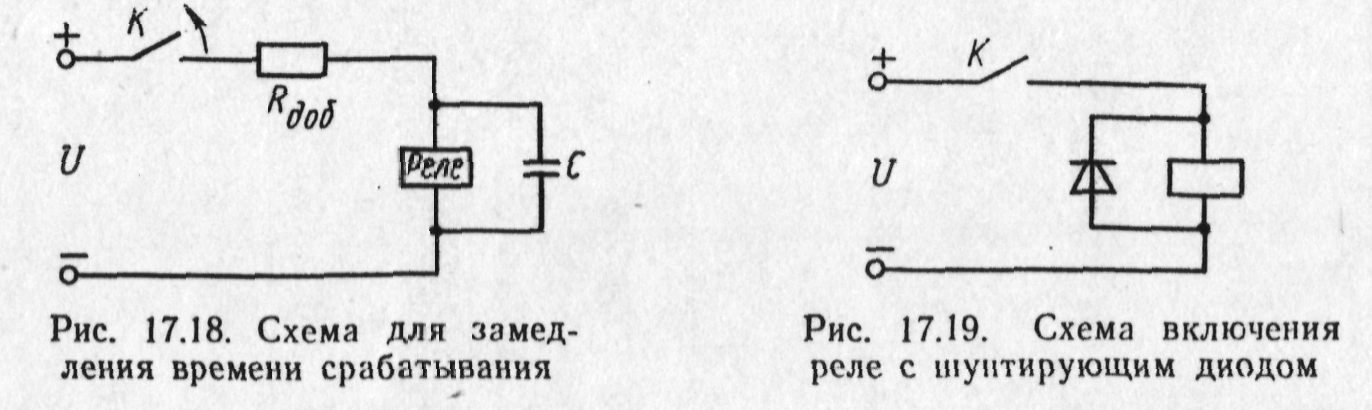
К схемным методам замедления времени срабатывания и отпускания относится метод шунтирования обмотки реле конденсатором (рис. 17.18). При включении реле ток в его обмотке будет нарастать медленнее за счет процесса зарядки конденсатора. Время срабатывания может быть увеличено примерно до 1 с по сравнению с примерно 50 мс при включении без конденсатора. При отключении реле, наоборот, конденсатор будет разряжаться на обмотку реле, замедляя уменьшение в ней тока. Дополнительное сопротивление Rдоб необходимо для ограничения тока, потребляемого от источника питания.
Эффективным схемным методом замедления времени отпускания является включение параллельно обмотке реле диода (в непроводящем по отношению К напряжению питания направлении). В этом случае (рис. 17.19) ЭДС самоиндукции, возникающая в обмотке реле при отключении, создает ток, протекающий через обмотку и реле и удерживающий якорь некоторое время в притянутом положении. Включение диода используется и для защиты обмотки реле от пробоя под действием перенапряжений при отключении.
Замедление работы реле обеспечивается и с помощью короткозамкнутого витка (или обмотки) на пути магнитного потока.
К конструктивным методам .уменьшения временных параметров реле относятся уменьшение хода якоря, уменьшение вихревых токов за счет применения шихтованного (набранного из отдельных пластин) магнитопровода. Следует также напомнить, что реле постоянного тока являются более быстродействующими, чем реле переменного тока.