

Современные задачи многомерного анализа в энцефалографии
.pdfВид ПО |
|
|
Назначение |
|
|
Требования |
|
|||
программные |
Обеспечение |
автоматизации |
Должны |
|
|
обеспечивать |
||||
компоненты |
|
разработки, |
|
отладки |
и |
проектирование |
и |
сопровождение |
||
технологическо |
сопровождения |
целевого |
ПО, |
целевого ПО, заносимого в целевое |
||||||
го |
ПО |
заносимого в целевое изделие в |
изделие, с заданными показателями |
|||||||
(целевое) |
|
процессе |
жизненного |
цикла |
качества |
|
|
|
|
|
|
|
продукции |
|
|
|
|
|
|
|
|
программные |
Обеспечение |
автоматизации |
Должны |
|
|
обеспечивать |
||||
компоненты |
|
разработки, |
|
отладки |
и |
|
|
|||
технологическо |
сопровождения |
целевого |
ПО, |
проектирование |
и |
сопровождение |
||||
го |
ПО |
заносимого |
в |
инструментальное |
целевого |
ПО, |
|
заносимого |
в |
|
(инструменталь |
изделие в |
процессе жизненного |
инструментальное |
изделие, |
с |
|||||
заданными показателями качества |
|
|||||||||
ное) |
|
цикла продукции |
|
|
|
|
|
|
||
Заключение
Конструирование бортового радиоэлектронного оборудования современного пилотируемого летательного аппарата уже невозможно представить себе без применения средств индикации авиационных приборов, обеспечивающих визуализацию символьной, растровой (или графической) информации в удобном для человеческого восприятия виде. Индикационное оборудование на борту летательного аппарата осуществляет отображение на экране рабочих кадров, содержащих исчерпывающую для пилотирования информацию в соответствии с рабочей индикационной программой и на основе данных, поступающих от ботовых датчиков и электронных блоков БРЭО.
Литература
1.Ефанов В.Н. Стеклянная кабина экипажа: тенденции и перспективы // Мир авионики.
2001. №1 с.20-26.
2.Жаринов И. О., Емец Р. Б. Индикационное оборудование в авиации XXI-ого века. // Актуальные проблемы анализа и синтеза сложных технических систем. / 32-ая научная
конференция преподавателей СПбГУИТМО: Сб. докл., СПб.: ГУИТМО, 2003, вып.11 (научно-технический вестник), с.193-195.
3.СТП 075 48014.00.165-03. Программно-управляемые средства. Требования к программному обеспечению и его документированию. Стандарт предприятия ФГУП СПб ОКБ "Электроавтоматика", 2003.
4.Третьяков Д.А. Системы кабинной индикации мода или необходимость // Мир авионики. 2001. №1 с.27-29.
244
Лингвистические структуры в задачах отображения пилотажно-навигационной информации на борту современного пилотируемого летательного аппарата.
П.П. Парамонов, Б.В. Видин, Ю.И. Сабо, И. О. Жаринов (ФГУП СПб ОКБ "Электроавтоматика")
При всех последних достижениях микропроцессорной техники в области структурной организации, повышении тактовой частоты процессоров, применения конвейеризации выполнения команд, дальнейшее существенное повышение эффективности электронных систем связано с отказом от программной реализации алгоритмов вычислений и переходом к их аппаратной реализации на базе СБИС. Такой переход обусловлен, с одной стороны, перспективной тенденцией построения сложных вычислительных систем на основе модульного принципа — систем с “открытой” архитектурой, предполагающей наличие центрального вычислителя и целого спектра высокопроизводительных сопроцессоров, контролеров специального назначения. С другой стороны — уровнем современной полупроводниковой техники с её высокой степенью интеграции и малой себестоимостью, предоставляющей разработчикам СБИС более широкие возможности для аппаратной реализации сложнейшего математического обеспечения.
Это позволит максимально учитывать специфику вычислительных методов и алгоритмов, применяя по возможности распределение этапов разработки, обеспечивая однородность и регулярность вычислений, простоту состава, структуры и внешнего управления, что в свою очередь составляет основу для разработки базовых операций при выполнении многих типовых вычислительных процедур.
Структурный анализ фрагментов растровых кадров изображения (см. рис.1) на экранах современных бортовых многофункциональных индикаторов МФЦИ позволяет говорить о существовании, по-видимому, определенного конечного набора базовых графических структур или графоэлементов, комбинация которых на экране составляет любое изображения в целом.
Основными структурами изображения современных средств индикации являются:
- индикационный кадр – законченное информационное визуальное сообщение, которое в заданный момент времени может быть целиком размещено на экране средства индикации. Кадр состоит из одного или нескольких фрагментов изображения – модулей изображения.
-модуль изображения – связанные между собой элементы изображения, которые характеризуются одинаковым законом перемещения на экране. Модуль может состоять из одного или нескольких элементов изображения. Модуль может быть статическим или динамическим. Статический модуль – модуль, в котором все элементы в процессе изображения не изменяют ни своего положения на экране, ни своего значения. Динамический модуль – модуль, в котором хотя бы один элемент в процессе формирования изображения от одного кадра к другому изменяет свое положение, либо значение.
-элементы изображения – простейшие составляющие изображения, с помощью и на основе которых может строиться любой модуль и кадр. Элементом изображения являются, например, точка, символ (знак алфавита или цифра) и т.д.
245

Рис.1. Пример рабочего кадра изображения на экране индикатора.
Учитывая матричную структуру средства отображения, любой графический примитив можно представить как упорядоченный набор отдельных “подсвеченных” пикселей. Тогда визуальному отображению, скажем, элементарной линии на экране будет отвечать последовательность повернутых определенным образом кристаллов (например, для жидкокристаллических экрана), закон выбора которых напрямую зависит от алгоритма перебора соответствующих им ячеек видео ОЗУ при, так называемой, росписи (или формировании) изображения в видеопамяти.
Построению алгоритмов генерации изображения в цифровых электронных устройствах отображения информации и разработке характерных для этого методологических вопросов посвящено немало публикаций как в нашей стране, так и за рубежом. Соответствующая область научного и практического исследования получила название Интерактивной Машинной Графики и сегодня включает в себя не только изучение математических основ синтеза отдельных фрагментов изображения, но и вопросы их аппаратной реализации как на базе современных микропроцессорных платформ, так и на базе специализированных СБИС так называемых микросхем графических контроллеров.
Графические контроллеры представляют собой “чипы” с высокой степенью интеграции, внутреннее устройство и связи которых подчинены решению определенной задачи формированию во внешних ячейках памяти (видео ОЗУ) фрагментов изображения в заданной системе координат. Порядок заполнения ячеек памяти видео ОЗУ основан на аппаратной реализации вычислительных процедур при выполнении поступающих в графический контроллер команд “высокого уровня”. В частности, известно, что в большинстве языков программирования для того, чтобы “нарисовать”, скажем, линию на экране необходимо задать четыре ее координаты (в декартовой системе координат: Х- начальное, У-начальное, Х-конечное, У-конечное) и определить команды задания цвета и построения линии. Например, в популярном языке программирования высокого уровня “Си” для программиста это эквивалентно заданию и выполнению следующих двух команд:
setcolor (red); |
//задание красного цвета; |
246 |
|
line(Xн,Yн,Xк,Yк) //построение линии с координатами (Xн,Yн)( Xк,Yк).
Однако не всегда оказывается очевидным как это реализуется на аппаратном уровне. На самом деле эти команды раскладываются (в машинном коде системы команд выполняющего программу процессора) в последовательность управляющих слов и команд графического контроллера, который осуществляет роспись ячеек в видео ОЗУ по жестко определенному алгоритму задания цвета, построения линий и т.д.
Такие алгоритмы сегодня существуют для достаточно большого числа различных графических примитивов:
-алгоритмы построения линий различной толщины (в 1 пиксель, в 2, в 3) и атрибутов (пунктирная линия, мигание линий и т. д.);
-алгоритмы построения дуг, окружностей, эллипсов и т.д., основанные на задания точки центра окружности, радиуса, начальных/конечных углов;
-алгоритмы генерации различных шрифтов и символов согласованной конфигурации;
-алгоритмы построения фигур и объектов произвольной формы, их “заливка” (закрашивание или штриховка заданным элементом изображения и т.д.).
ив той или иной степени стандартизированы.
Фирмы-разработчики (в частности, Motorolla, Intel, Texes Instruments и т.д.) таких
“чипов” стараются унифицировать их аппаратные интерфейсы для обеспечения программной совместимости рабочих индикационных программ. Действующий сегодня стандарт получил название VESA и распространяется на большинство аппаратнопрограммных средств современных систем отображения информации. Стандарт непрерывно совершенствуется и накладывает ограничения в первую очередь на систему команд VESAсовместимых графических контроллеров и на форматы данных (что достигается за счет программной поддержки “чипов” библиотеками драйверов), оставляя на усмотрение разработчиков вопросы организации внешнего интерфейса микросхем памяти (видео ОЗУ), управляющей шины и специализированных интерфейсов экранов.
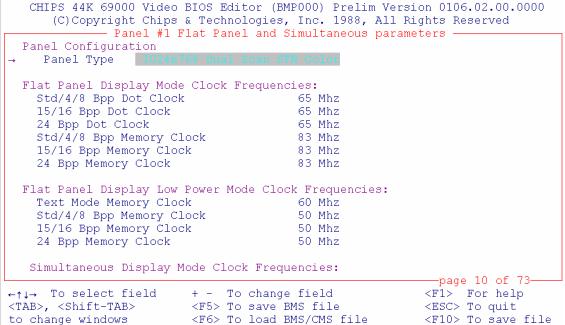
Рис.2. Вид оболочки для разработки новых "прошивок" графических контроллеров фирмы Motorolla.
В стремлении к реализации своей продукции в информационно-управляющих системах некоторые перспективные фирмы-производители микросхем графических контроллеров предлагают инженерам-схемотехникам набор программных инструментов (см.
247
рис. 2) для модификации базовых “прошивок” микросхем с целью обеспечение интерфейсного пользовательского взаимодействия с экранами различного типа за счет возможности изменения временных соотношений (диаграмм) тактовых CLK, кадровых VSYNC и строчных HSYNC управляющих сигналов в широких пределах.
Литература
1. Вельтмандер П.В. Основные алгоритмы компьютерной графики. Машинная графика: Учеб. пособие / НГТУ. Новосибирск. 1997. кн.2.
2. Парамонов П. П., Ильченко Ю. А., Жаринов И. О. Теория и практика статистического анализа картографических изображений в системах навигации пилотируемых летательных аппаратов. // Датчики и системы. — М.:, 2001 №8. — с.15-19.
3. Информационно-управляющие системы для подвижных объектов. Семинары ASK LAB 2001 / Сборник статей // Под общ. ред. М. Б. Сергеева СПб.: Политехника, 2002. 185с.
248
Критерий выбора структуры и содержания стенда для испытаний навигационно-пилотажного комплекса летательного аппарата
А.М. Рогачевский (ФГУП СПб ОКБ “Электроавтоматика”)
При создании и отработке современных навигационно-пилотажных комплексов (НПК) летательных аппаратов важную роль играет разработка стендов для проведения предварительных и государственных испытаний комплексной вычислительной системы самолетовождения (КВСС) на соответствие техническому заданию (ТЗ). Целью разработки стенда является получение комплекса программно-аппаратных средств для обеспечения среды математического моделирования функционально-прикладных (тактико-технических) задач НПК и работы функционально-специального программного обеспечения (ПО) при установке КВСС в составе бортового радиоэлектронного оборудования (БРЭО) на летательном аппарате. Основными задачами, решаемыми на стенде, должны быть статическая и динамическая отладка и математическое моделирование ПО на персональном компьютере (ПК), комплексная отработка режимов работы НПК и проверка соответствия назначения, тактических и технических параметров КВСС требованиям ТЗ.
Для выполнения этих задач стенд должен содержать:
•Пульт управления и индикации в натурном исполнении;
•Бортовую цифровую вычислительную машину;
•Управляющую и моделирующую ПЭВМ-сервер с моделирующей и сервисной программной средой и платами стандартных интерфейсов для выхода на имитаторы датчиков;
•Комплект сетевых адаптеров для подключения необходимого числа терминалов к серверу;
•Датчики или имитаторы оборудования, устанавливаемого на летательном аппарате;
•Необходимое вспомогательное и монтажное оборудование.
При этом функционирование стенда может осуществляться в режимах:
1.Встроенного моделирования и информационно-стыковочного теста для контроля связей с датчиками и системами или их имитаторами.
2.Полунатурного моделирования с имитаторами датчиков и систем НПК, в том числе
ив динамических режимах, которые обеспечиваются моделирующей средой на ПК. Применение системы встроенного моделирования позволяет провести проверку на соответствие ТЗ по номенклатуре и качеству решения задач и выполнения функций КВСС в целом, а также проверку отказоустойчивости, обеспечиваемой программным обеспечением КВСС, путем имитации нештатных режимов и отказных ситуаций.
Применение стенда должно обеспечить:
•Достоверность и надежность результатов испытаний опытного образца КВСС;
•Снижение стоимости разработки и доработки опытного образца КВСС и конструкторской документации в процессе испытаний за счет более полного выявления причин отклонений опытного образца от требований ТЗ;
•Уменьшение объема стендовых и натурных испытаний при определении готовности КВСС к следующему виду испытаний (серийному производству).
Таким образом, стенд для испытаний НПК летательных аппаратов представляет собой сложную динамическую систему для диагностирования технического состояния оборудования и программного обеспечения. Насколько полно содержание стенда удовлетворяет предъявляемым к нему требованиям можно оценить с помощью критерия эффективности. В качестве критерия предлагается использовать векторный критерий вида:
R(n) = {S(n), D(n), Q(n)}, |
(1) |
где в качестве аргумента n принято количество фрагментов m испытаний НПК, выполняемых с использованием ПО, отнесенное к общему количеству фрагментов N.
249
Первая компонента критерия S(n) представляет собой суммарные затраты на создание стенда (материальное, программное и документационное обеспечение), непосредственное проведение испытаний КВСС на стенде и в натурных условиях, а также устранение замечаний к аппаратуре, ПО и конструкторской документации по результатам проверок на стенде и натурным испытаниям. Затраты рассчитываются для каждого
фрагмента и затем суммируются с соответствующим весовым коэффициентом εi . Весовые коэффициенты назначаются как экспертные оценки, учитывающие вклад данного фрагмента в расходы на проведение проверок и испытаний. В частном случае, если затраты по данному фрагменту не зависят от содержания стенда и программы проверок, то весовому коэффициенту может быть присвоено нулевое значение. Если затраты на доработку опытного образца КВСС зависят от достоверности результатов проверок и испытаний, то весовой коэффициент должен назначаться с учетом этой зависимости. Полученные суммарные затраты переводятся в относительные единицы делением их на базовые затраты S0. Таким образом, экономическая составляющая критерия рассчитывается по формуле:
|
1 |
N |
|
|
S(n) = |
∑εi Si . |
(2) |
||
S0 |
||||
|
i=1 |
|
Вторая компонента критерия D(n) определяется как полная вероятность «правильного» результата проверки испытуемого объекта (ИО), в рассматриваемом случае НПК. Это означает, что в процессе испытания на стенде определено то состояние ИО, в котором он действительно находится. Значение вероятности Di оценивается для
каждого фрагмента и ей придается весовой коэффициент ηi. Весовые коэффициенты являются экспертными оценками влияния данного фрагмента на общие результаты проверки. Как правило, их величины не должны значительно отличаться от единицы и выбираются так, чтобы полная вероятность не превышала допустимого значения. Если фрагмент проверки выполняется без использования моделирующей и сервисной программной среды, то весовой коэффициент берется равный нулю. Затем частные вероятности с учетом их весовых коэффициентов объединяются в полную вероятность, а именно:
N |
|
D(n) = ∏(1 −ηi + ηi Di ), |
(3) |
i=1
которая характеризует точность прогнозирования состояния ИО.
Методика оценивания вероятности получения «правильного» результата проверки ИО в данном фрагменте испытаний состоит в следующем. Предполагаем, что состояние ИО в этом фрагменте определяется совокупностью k независимых параметров. Истинное значение параметра xj (j = 1…k) является случайной величиной, плотность распределения которой определяется функцией f1(xj). Результат проверки zj=xj+yj, где yj – случайная ошибка, плотность распределения которой – f2(yj). Материальное и программное обеспечение фрагмента выполняет проверку совокупности параметров, на основании которой вырабатывается заключение о состоянии ИО. При этом возможно одно из событий:
C11 – значение параметра xj (j = 1…k) и результат проверки zj (j = 1…k) в пределах поля допуска, т.е. ИО работоспособен и результат проверки совпадает с состоянием ИО;
С22 – значение параметра xj (j = 1…k) и результат проверки zj (j = 1…k) вне поля допуска, т.е. ИО неработоспособен и результат проверки совпадает с состоянием ИО.
Оценка вероятности появления «правильного» результата, как показано в [2],
будет:
k |
|
Di = ∏(1 −α j −βj ); |
(4) |
j=1
250
b |
|
|
a−x |
|
|
∞ |
|
|
|
αj = ∫ f1 |
(x j ) ∫ f2 ( y j )dy + ∫ f2 |
( y j )dy dx; |
|
||||||
a |
|
|
−∞ |
|
|
b−x |
|
|
|
a |
f1 |
b−x |
f2 |
|
∞ |
f1 |
b−x |
|
|
βj = ∫ |
(x j ) ∫ |
(y j )dy dx + ∫ |
(x j ) ∫ f2 |
(y j )dy dx , |
|||||
−∞ |
|
|
a−x |
|
|
b |
|
a−x |
|
где aj,bj – границы поля допуска параметра xj (j = 1…k).
Надежность функционирования материального и программно-моделирующего обеспечения проверок и испытаний НПК будем оценивать вероятностью Q(n) появления отказов в работе стенда. Вероятность отказов рассчитывается для каждого фрагмента и ей придается весовой коэффициент ρi. Весовые коэффициенты назначаются как экспертные оценки, учитывающие вклад вероятности отказа при выполнении данного фрагмента в общую вероятность отказа в ходе проверок или испытаний. Целесообразно назначать весовой коэффициент с учетом времени, которое занимает выполнение фрагмента в общем времени работы стенда. Компонента критерия, характеризующая надежность контроля НПК, рассчитывается по формуле:
N |
|
Q(n) = ∏ρi Qi . |
(5) |
i=1 |
|
Каждый элемент материального |
и программно-моделирующего обеспечения |
выполнения фрагмента характеризуется своей вероятностью исправной работы. Поэтому при определении состояния ИО в данном фрагменте возможно появление одного из несовместимых событий:
C12 – значение параметра xj (j = 1…k) лежит в поле допуска, а результат проверки zj (j = 1…k) – вне поля допуска, т.е. объект работоспособен, а результат проверки указывает на его неработоспособность (ложный отказ);
C21 – значение параметра xj (j = 1…k) находится вне поля допуска, а результат проверки zj (j = 1…k) – в поле допуска, т.е. объект неработоспособен, а результат проверки указывает на его работоспособное состояние (не обнаруженный отказ).
Предположим, что все параметры xj (j = 1…k) данного фрагмента контролируются с помощью одного и того же материального и программно-моделирующего обеспечения. Тогда очевидно соотношение:
Qi |
= Q12 +Q21 ; |
(6) |
при Q12 |
= PO1 (PC1Q1 +QC 2 ); |
Q21 = QO2 (PC1Q2 +QC 2 ), |
где PO1 , QO2 – априорные вероятности нахождения ИО соответственно в работоспособном и неработоспособном состояниях; PC1 , QC2 – априорные вероятности нахождения средств контроля соответственно в рабочем и нерабочем состояниях; Q1 – условная вероятность появления ложного отказа при работоспособных средствах контроля; Q2 – условная вероятность появления не обнаруженного отказа при работоспособных средствах контроля. Эти вероятности рассчитываются на основании заданных полей допусков и погрешностей определения контролируемых параметров, а также характеристик надежности средств контроля, используемых в данном фрагменте. Для материальных средств контроля характеристики надежности берутся из их технических данных. Характеристики надежности для программно-моделирующего обеспечения рассчитываются по соответствующей методике (например, рассмотренной в [3,4]).
Используя предложенную методику, можно рассчитать коэффициент эффективности имеющихся структуры испытательного стенда и содержания программы испытаний опытного образца КВСС. Для того, чтобы определить насколько полно параметры стенда удовлетворяют требованиям, предъявляемым к результатам проверок и испытаний, необходимо сравнить полученное значение коэффициента эффективности R(n) с его оптимальным значением RO(n). Алгоритм оптимизации коэффициента эффективности представлен на рис.1.
251

Техническое задание на разработку КБО
Программа испытаний КБО
Декомпозиция программы испытаний на фрагменты
Фрагмент 1 |
|
Фрагмент 2 |
*********** |
Фрагмент N |
Оценка cтоимости S1
Весовой коэффиц.ε1
Оценка
точности прогнозир.
cостояния D1
Весовой коэффиц.η1
Оценка надежности Q1
Весовой коэффиц. ρ1
Формирование критерия оптимальности
Оптимизация
Оценка резуль-  нет Т тата
нет Т тата
да  Выход
Выход
Рис. 1
252
Алгоритм предусматривает декомпозицию программы испытаний на отдельные фрагменты, которые представляют собой неповторяющиеся проверки ИО на стенде и при натурных испытаниях. Для каждого фрагмента оценивается его стоимость, которая включает стоимость средств контроля, обеспечивающих выполнение данного фрагмента, а также расходы на проведение проверок, испытаний и устранение замечаний. Если выполнение фрагмента связано с использованием программно-моделирующего обеспечения, то расходы на его разработку и отладку включаются в стоимость фрагмента. Одновременно оцениваются достоверность получения «правильного» результата выполнения фрагмента (4) и надежность функционирования его средств контроля (6).
Полученные оценки с учетом их весовых коэффициентов используются для формирования компонентов (2), (3), (5) критерия эффективности рассматриваемых структуры стенда и содержания программы испытаний. В качестве начальной структуры стенда можно использовать состав НПК, включающий КВСС и взаимодействующие с ней системы БРЭО. По экспертной оценке, в этом случае экономическая компонента критерия может иметь наибольшую величину, а достоверность прогнозирования состояния и вероятность выявления отклонений опытного образца от требований ТЗ находится на среднем уровне. Значение третьей компоненты критерия, в основном, определяется техническим состоянием систем БРЭО и качеством отладки ПО, а также вероятностью появления ложных отказов из-за расширенных границ погрешностей средств контроля.
После оценки результата расчета критерия эффективности для начальной структуры стенда следует постепенно изменять структуру стенда, заменяя системы БРЭО их имитаторами, а также переходя к программно-моделирующему обеспечению функционирования соответствующего фрагмента и полунатурному моделированию при выполнении проверок на стенде. Достаточно очевидно, что при таком изменении структуры стенда экономическая компонента критерия должна уменьшаться вследствие замены дорогостоящей материальной части ее имитаторами. Кроме того, расходы на доработку опытного образца и конструкторской документации также должны сокращаться за счет более полного и качественного выявления отклонений опытного образца от требований ТЗ при выполнении фрагментов, в которые были внесены изменения. Эта же причина повлияет на увеличение достоверности прогнозирования состояния ИО за счет повышения точности измерения его контролируемых параметров и появления возможности моделирования нештатных режимов или ситуаций. Надежность функционирования стенда будет увеличиваться поскольку, как правило, надежность программно-моделирующего обеспечения выше надежности реальных систем БРЭО, а появление ложных или не обнаруженных отказов должно снижаться как следствие повышения точности определения параметров контроля.
Расчет критериев эффективности целесообразно RO(n) продолжать до тех пока не будут использованы все возможности изменения структуры стенда. При этом объем вычислений может оказаться достаточно большим, особенно, если их выполнять при различном сочетании фрагментов, программно-моделирующее обеспечение которых изменяется. При вычислении значения RO(n) надо использовать величины, обратные расчетным значениям компонент SO(n) и QO(n). За оптимальное значение коэффициента эффективности следует принять ту его величину, которая окажется в результате расчетов максимальной. Сравнив оптимальное значение с коэффициентом R(n), рассчитанным для анализируемой структуры стенда, получим оценку качества этого стенда. Оптимальными структурой стенда и содержанием программы испытаний могут считаться те, для которых был получен коэффициент эффективности RO(n).
Для того, чтобы уменьшить объем вычислений при определении оптимального значения коэффициента оптимальности можно использовать квазиоптимальный алгоритм, показанный на рис.2.
253