

Введение
Автоматическое управление — это такой способ управления, при котором необходимые операции выполняются посредством системы, функционирующей без вмешательства человека, в соответствии с заранее заданными условиями.
Функции автоматического управления могут быть чрезвычайно многообразными. Применительно к оборудованию тепловозов это могут быть: поддержание необходимых режимов работы машин и агрегатов; поддержание постоянными или изменение по заданным законам каких-либо физических величин, характеризующих режимы работы; включение и выключение машин и агрегатов; реверсирование ТЭД и их торможение; осуществление определенной последовательности операций; защита от недопустимых режимов работы; контроль состояния физических величин или режимов работы.
Совокупность объекта управления и автоматических управляющих устройств называется системой автоматического управления (САУ).
Два основных принципа автоматического управления. Основным признаком, по которому могут быть подразделены САУ, является воздействие на систему управления действительного состояния объекта управления. Если в системе происходит непрерывный контроль управляемой величины и в зависимости от ее значения осуществляется воздействие на объект управления, то такая система называется САУ по отклонению управляемой величины (такую систему иногда называют системой автоматического регулирования САР). Ноли воздействие на объект управления осуществляется вне зависимости от состояния управляемой величины, то такая система называется системой автоматического управления (САУ) по возмущающему воздействию (или системой автоматического управления по произвольно изменяемой нагрузке). В комбинированных системах автоматического управления сочетаются оба принципа управления, как по возмущающему воздействию, так и по отклонению управляемой величины.
Структурная схема САУ по отклонению управляемой величины представлена на рис.1. Здесь управляемая величина воздействует на вход регулятора через обратную связь. Обратной связью в общем случае называется воздействие (сигнал) от управляемой величины на вход системы или, другими словами, на работу регулятора. Сигналам называется физическая величина, используемая для передачи команды или информации.
Если система состоит из нескольких последовательно включенных элементов, то воздействие от управляемом величины на вход системы называется главной обратной /вязью, а воздействие от выхода какого-либо элемента на вход предыдущего (но цепи прохождения сигнала) называется дополнительной (местной) обратной связью. Если обратная связь увеличивает воздействие входного сигнала на выходной (сигнал обратной связи складывается с входным сигналом), то она называется положительной обратной связью. Если же указанное воздействие уменьшается (сигнал обратной связи вычитается из входного), то это будет отрицательная обратная связь (см. рис. 4).
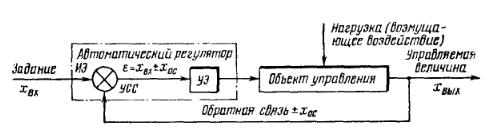
Рис. 1. Структурная схема САУ по отклонению управляемой величины.
В САУ электрической передачи, как и в других технических системах, преимущественно применяется отрицательная обратная связь, которая улучшает переходные процессы, повышая устойчивость И быстродействие системы.
Различают жесткую (апатическую) и гибкую
(исчезающую) обратные связи. При жесткой обратной связи ее выходное воздействие всегда пропорционально входному сигналу (как при переходных, так и при установившихся процессах). Введение жесткой обратной связи обеспечивает статическую стабилизирующую САУ. Гибкая обратная связь действует только при переходных процессах и исчезает при установившемся режиме. При гибкой обратной связи система управления является астатической стабилизирующей.
Система автоматического управления с обратной связью является замкнутой. При отклонении управляемой величины от заданного значения по любой причине происходит такое воздействие на объект управления, которое устраняет это отклонение.