

7. Анализ чувствительности скорректированной системы.
Для анализа чувствительности скорректированной системы выберем в качестве нестабильного звена усилитель. Исследуем разброс значений показателей качества при изменении коэффициента усиления kУ в пределах 120-180. Показатель колебательности M должен быть меньше 1.2, а время регулирования tР минимально из всего набора полученных значений. Для наглядности результаты представлены в таблице 1.
|
kУ |
tР,с |
M |
|
120 |
0.12 |
1.048 |
|
130 |
0.10 |
1.045 |
|
140 |
0.09 |
1.042 |
|
150 |
0.08 |
1.040 |
|
160 |
0.07 |
1.038 |
|
170 |
0.07 |
1.036 |
|
180 |
0.11 |
1.035 |
Табл.1. Анализ чувствительности скорректированной системы.
Полученные значения показывают, что показатель колебательности удовлетворяет условию задания (меньше 1.2), а минимальное время регулирования равно 0.07 с. Можно сделать вывод, что скорректированная система достаточно устойчива и удовлетворяет заданным показателям качества в пределах погрешности (лучшие показатели достигаются при kУ =170,что можно практически реализовать).
8. Анализ нелинейной системы.
8.1. Моделирование системы в simulink.
С помощью инструмента Simulink из пакета MATLAB введем модель системы в ЭВМ. Получим следующую схему:
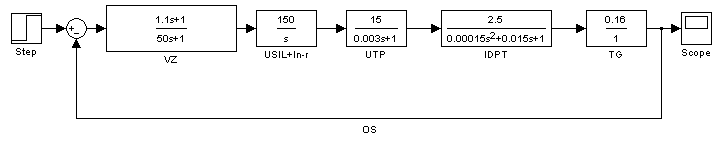
Рис. 13. Схема скорректированной системы, полученная путем моделирования в Simulink.
После моделирования процесса в Simulink видно, что результаты (см. рис. 14) совпадают с результатами, полученными при помощи программы CLASSIC (см. рис. 11).
h(t)
t,
с
Рис.14. График переходного процесса скорректированной системы, полученный путем моделирования в Simulink.
8.2. Ввод нелинейного элемента.
В реальных системах обычно присутствуют нелинейные элементы. Это могут быть звенья релейного типа, звенья с кусочно-линейной характеристикой, звенья с криволинейной характеристикой, нелинейные импульсные звенья, логические звенья и др. Рассмотрим нелинейность типа насыщение. Блок Saturation (Насыщение) представляет собой одну из распространенных нелинейностей в цепях с усилителями, которые обычно имеют ограничения в усилении входного сигнала уровнем питающего его напряжения.
Рассмотрим данный элемент подробнее:
Назначение: выполняет ограничение величины сигнала. Параметры:
Upper limit-верхний порог ограничения.
Lower limit-нижний порог ограничения.
Treat as gain when linearizing (флажок)-трактовать как усилитель с коэффициентом передачи равным 1 при линеаризации.
Выходной сигнал блока равен входному если его величина не выходит за порог ограничения. По достижении входным сигналом уровня ограничения выходной сигнал блока перестает изменяться и остается равным порогу. На рис. 15 показан пример использования блока для ограничения синусоидального сигнала. На рисунке приводятся временные диаграммы сигналов и зависимость выходного сигнала блока от входного.

Рис.15. Пример использования блока Saturation.
На рис. 16 представлена схема скорректированной системы с введенным нелинейным элементом.

Рис. 16. Схема нелинейной системы с блоком Saturation.
На рис.17 изображено действие блока насыщение. Входной сигнал (1) подается с выхода УТП, результат на выходе блока (2) подается на вход ИД. Заданы условия границы насыщения сверху 2.57 В, снизу 0 В, из рисунка можно получить полное представление о нелинейности типа насыщение на входной сигнал.
U,
В t,
с
Рис. 17. Сигналы на входе блока Saturation (1) и на его выходе (2).
Исходный максимальный уровень напряжения на двигателе (без ограничения насыщение) равен 2.76 В.
На рис.18 приведен пример изменения графика переходного процесса при введении нелинейности насыщения с параметрами насыщения 2.55 В – 0 В. Видно как при ограничении максимального напряжения, подаваемого на исполнительный двигатель, время затухания сигнала увеличивается, график исходного переходного процесса (1) при насыщении имеет вид (2).
t,
с h(t)
Рис. 18. Изменение характера переходного процесса при введении блока Saturation.
Далее будут проанализированы параметры переходного процесса при введении насыщения и сделаны выводы об изменениях в системе при добавлении нелинейного звена. В таблице 2 представлены изменения параметров переходного процесса, характеризующих систему.
|
Границы насыщения, В |
Значение перерегулирования σ, % |
Время регулирования tр, с |
|
2.6..- 0 |
4.0192 |
0.0873 |
|
2.57..- 0 |
2.8759 |
0.0873 |
|
2.55..- 0 |
2.0751 |
0.0873 |
|
2.5..- 0 |
0.8889 |
0.0873 |
|
2.45..- 0 |
0 |
0.0932 |
|
2.4..- 0 |
0 |
0.0844 |
|
2.35..- 0 |
0 |
0.092 |
|
2.3..- 0 |
0 |
∞ |
Табл.2. Влияние насыщения на характеристики переходного процесса.
Из приведенной таблицы видно, что система достаточно устойчива при границах насыщения 2.6.. - 0. При границах 2.4..- 0 время регулирования оказывается меньше исходного. При границах 2.3..- 0 процесс не входит в полосу 0,95 – 1,05, поэтому его время регулирования равно бесконечности(процесс не сходится к единице).