

3.6. Общая передаточная характеристика
а) разомкнутой системы

б) замкнутой системы
![]() ,
следовательно
,
следовательно ,
отсюда после упрощения получается:
,
отсюда после упрощения получается:
![]() .
.
4. Обеспечение условий селективной инвариантности.
В соответствии с заданием выбираем астатическую систему, вследствие чего вводим интегратор, подключая его последовательно перед усилителем.
5. Анализ устойчивости и качества переходных процессов.
5.1. Распределение нулей и полюсов замкнутой системы.

Рис. 3. Распределение нулей и полюсов замкнутой системы.
Нулей нет; полюсы: 62.2 ± 139∙i; -279 ± 91.7∙i.
5.2. График переходного процесса на единичное ступенчатое воздействие.

Рис. 4. График переходного процесса на единичное ступенчатое воздействие.
5.3. График АФХ замкнутой системы.

Рис. 5. График характеристики в координатах “Im-Re” замкнутой системы.
5.4. Графики логарифмических частотных характеристик (ЛЧХ) разомкнутой системы.

Рис. 6. Графики логарифмических частотных характеристик (ЛЧХ) разомкнутой системы.
ω,
с-1
рис.7. Асимптотическая логарифмическая амплитудно-частотная характеристика разомкнутой системы.
По графику рис. 3 можно судить об устойчивости системы: т.к. на графике есть полюсы, находящиеся в правой полуплоскости, то система является неустойчивой, переходный процесс расходящийся, что можно наблюдать на графике переходного процесса рис. 4. Также можно сказать о неустойчивости системы по критерию Найквиста, так как на частоте среза, соответствующей 0 дБ, дополнительный фазовый сдвиг больше 180 град. по модулю (см. рис. 6).
6. Коррекция системы.
Структурная схема представлена на рисунке 8. ПФ блока “OS”(обратная связь) равна –1; “VZ” — варьируемое звено.

Рис. 8. Структурная схема, представляющая способ коррекции с помощью последовательно включенного корректирующего звена.
6.1. Последовательно включенное корректирующее звено.
6.1.1. Графики желаемой ЛАЧХ с найденными параметрами для разомкнутой системы и ЛАЧХ звена коррекции.

Рис. 9. Графики желаемой ЛАЧХ с найденными параметрами (ЛАЧХ текущей системы) для разомкнутой системы и ЛАЧХ звена коррекции (ЛАЧХ варьируемого блока).
6.1.2. ПФ звена коррекции.

![]()
6.1.3. Распределение нулей и полюсов, график переходного процесса скорректированной системы.

Рис. 10. Распределение нулей (кружок) и полюсов (крестики) скорректированной системы.
Один нуль: -0.909; полюсы: -34.6.2 ± 53.2∙i , -332 , -31.4 , -0.953.

Рис. 11. График переходного процесса скорректированной системы.
Звено коррекции является практически реализуемым и не нуждается в редукции (из (1) видно, что передаточная функция звена коррекции имеет одинаковую степень полиномов в числителе и знаменателе (первую), следовательно, передаточная функция удовлетворяет условию задания).
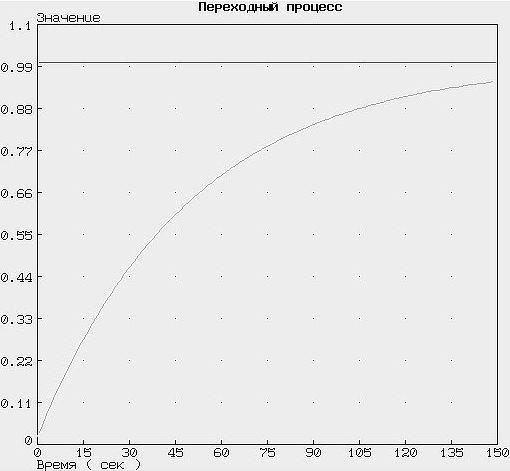
Рис. 12. График переходного процесса на выходе звена коррекции.
Из рисунка 12 видно, что переходный процесс на выходе корректирующего звена не превышает значение 1. Показатель колебательности при данном включении корректирующего звена примерно равен 1.04. Время регулирования примерно равно 0.084 сек.