

ОУ
- К
Динамический
регуляторНаблюдатель













f x

![]()


Рис. 3.3.
Получим ПФ динамического регулятора
>>[numr,denr]=ss2tf(Ar,Br,Cr,Dr)
numr =
0 -9900 -41700 -284300 -2096400
denr =
1 70 1820 25950 212530
>>printsys(numr,denr)
num/den =
-9879.9 s^3 - 41699 s^2 - 284342.5 s - 2096425
--------------------------------------------------------------
s^4 + 67 s^3 + 1818 s^2 + 25950 s + 212529.44
Проверим устойчивость регулятора. Корни ХП должны быть отрицательными:
>>roots(denr)
ans =
-26.0017 + 9.0279i
-26.0017 - 9.0279i
-7.4983 +14.9769i
-7.4983 -14.9769i
Динамический регулятор устойчив в малом.
3.2.3. Анализ замкнутой системы с динамическим регулятором.
Прежде всего проведем расчеты по линеаризованным моделям – проверим расположение корней замкнутой системы (рис.3.3.).
f
X
A,
B, C, D + –






Ar,
Br, Cr, Dr


Рис. 3.4.
>>[Ac,Bc,Cc,Dc]=feedback(A,B,C,D,Ar,Br,Cr,Dr)
Ac =
0 0 0 1 0 0 0 0
-9.8 0 0 0 10.45 -15 -73 1.2
0 1 0 0 0 0 0 0
0 0 -107.8 0 0 0 0 0
52 0 0 0 -52 0 0 1
-204.6 0 0 0 205 -15 -73 1.2
-70 0 0 0 70 1 0 0
965 0 0 0 -965 0 -107.8 0
Bc = (0 1 0 0 0 0 0 0)’
Cc = (1 0 0 0 0 0 0 0)
Dc = 0
>>eig(Ac)
ans =
-20.0000
-15.0000
-10.0000
-7.0000
-7.0000
-5.0000
-2.0000
-1.0000
В соответствии с первым методом Ляпунова положение равновесия нелинейная система устойчива в малом.
Для оценки области притяжения положения равновесия нелинейной системы (НС) (устойчивость в большом) проведем имитационное исследование. Схема данной системы созданная в Simulinkпоказана на рис.3.5.
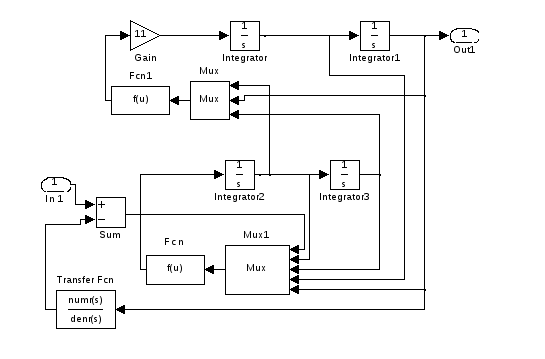
Рис.3.5.
На рис.3.6. можно увидеть графики переходного процесса при различных начальных отклонениях.

Рис 3.6.
Мы можем убедиться, что синтез выполнен правильно, т.к. при малых отклонениях мы имеем устойчивый переходный процесс.
4. Синтез дискретного регулятора
Методы синтеза
Если управляющее устройство представляет собой Микропроцессор, то алгоритм управления должен иметь вид разностного уравнения, т.к. в цифровых устройствах время дискретно.
Дискретный алгоритм УУ может быть получен двумя путями (рис 4.1.):
Дискретизация аналогового прототипа;
Синтез дискретного регулятора на основе дискретной модели объекта.
Нелинейные
ДУ объекта

Линеаризация
ОУ




Дискретизация
ОУ Синтез
динамического регулятора


Синтез
дискретного регулятора Дискретизация


Имитация




Рис 4.1.
Дискретные регуляторы, полученные двумя путями, вообще говоря, различны и зависят от выбора периода дискретизации времени Т.
4.2. Дискретизация объекта и анализ.
Выберем Т=0.01 с
Эта величина зависит как от свойств объекта и требований к системе управления, так и от выбора МП.
Если анализ замкнутой системы покажет неудовлетворительные качества процессов управления, то одной из причин может быть слишком большое Т, приводящее к потере информации.
Дискретизацию ДУ объекта выполняем по команде
>> [Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,0.01);
Ad =
1.0000 -0.0000 -0.0054 0.0100
-0.0980 1.0000 0.0002 -0.0005
-0.0005 0.0100 1.0000 -0.0000
0.0002 -0.0054 -1.0780 1.0000
Bd =
-0.0000
0.0100
0.0001
-0.0000
Cd=
1 0 0 0
Dd=
0
Разностные уравнения (РУ) в ФПС имеют вид:

где
![]() -
вектор состояния ,U–
внешнее воздействие
-
вектор состояния ,U–
внешнее воздействие
Анализ собственных значений матрицы Adпоказывает, что дискретный объект не устойчив:
» eig(Ad)
ans =
1.0587
0.9984 + 0.0570i
0.9984 - 0.0570i
0.9446
имеется один корень, лежащий вне единичного круга.
Компьютерная имитация также показывает неустойчивость объекта
(рис 4.2.)

Рис 4.2.
Необходимо синтезировать дискретное управляющее устройство.
4.3. Синтез дискретного регулятора
Для синтеза регулятора состояния выберем метод размещения собственных значений. Назначим желаемые собственные значения дискретной системы так, чтобы процессы были похожими на поведение соответствующей непрерывной системы. Для этого воспользуемся соответствием между комплексными плоскостями SиZ, как это показано на рис. 4.3.:
S Z j j 1


















Рис. 4.3.

Отобразим желаемые собственные значения:
p=[-5,-1,-2,-7]';
>> q=exp(p*0.01)
q=
0.9512
0.9900
0.9802
0.9324
Для
вычисления матрицы РС
![]()
используется та же команда что и для непрерывного случая:
>> Kd=place(Ad,Bd,q);
Kd =
-10.4026 14.2690 68.3705 -1.1615
Проверим собственные значения матрицы Ad – Bd*Kd
» eig(Ad-Bd*Kd)
ans=
0.9324
0.9512
0.9802
0.9900
Они совпадают с желаемыми собственными значениями. Синтез выполнен правильно.
Поскольку измеряется не полный вектор состояния, то необходимо синтезировать наблюдатель. Выберем тот же метод и назначим собственные значения наблюдателя так, чтобы процессы были похожими на непрерывный случай.
p0=[-10,-20,-15,-7]'
>>q0=exp(p0*0.01)
q0 =
0.9048
0.8187
0.8607
0.9324
Матрицу обратных связей наблюдателя находим по команде:
>>Ld=place(Ad',Cd',q0)';
Ld =
0.4833
-1.6279
-0.5585
8.0834
Динамический регулятор представляет собой объединение регулятора состояния и наблюдателя.
Его матрицы вычисляются по команде:
>>[Ard,Brd,Crd,Drd]=dreg(Ad,Bd,Cd,Dd,Kd,Ld);
Ard =
0.4328 -0.0000 -0.0054 0.0100
0.9271 0.8573 -0.6835 0.0111
0.5713 0.0093 0.9966 0.0001
-8.6929 -0.0051 -1.0768 1.0000
Brd =
0.5672
-0.9210
-0.5712
8.6929
Crd =
65.4283 14.2690 68.3705 -1.1615
Drd =
-75.8309
Получим ПФ регулятора:
>>[numrd,denrd]=ss2tf(Ard,Brd,Crd,Drd);
-75.8309 s^4 + 224.0468 s^3 - 220.8451 s^2 + 72.6134 s + 2.1316e-013
W(s)= -------------------------------------------------------------------------------------
s^4 - 3.2867 s^3 + 4.0399 s^2 - 2.1963 s + 0.4447
roots(denrd)= 0.9243 + 0.1281i
0.9243 - 0.1281i
0.7985
0.6396 получили устойчивый регулятор
4.4. Анализ замкнутой системы
Анализ проведем расчетным и имитационным способом.
4.4.1. Расчетный анализ
Рассмотрим линейную замкнутую систему, структура которой изображена на рис. 4.4.

Рис. 4.4.
Получим ПФ замкнутой системы:
>>[numdc,dendc]=feedback(numd,dend,numrd,denrd);
numdc =
1.0e-006 *
0 -0.0449 -0.3465 0.9483 -0.3184 -0.7832 0.6840 -0.1211 -0.0200
dendc =
1 -7.2867 23.1866 -42.0759 47.6158 -34.4027 15.4932 -3.9751 0.4447
>>roots(dendc);
ans =
0.9292 + 0.0501i
0.9292 - 0.0501i
0.9900
0.9802
0.9512
0.9390
0.9323
0.6355
Расчетный анализ показал устойчивость замкнутой системы, т.к. все полюсы ПФ находятся внутри единичного круга.
Имитационное исследование
Имитацию будем проводить с помощью программы Matlab/Simulink. При достаточно малых отклонений получаем сходящиеся графики переходных процессов дискретных во времени (рис.4.5.).

Рис. 4.5.