

График приведен на рисунке 10.
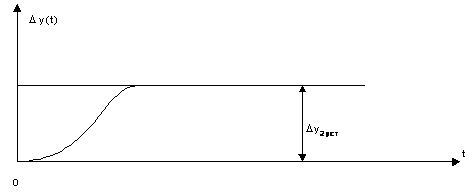
Рисунок 10 – График вспомогательной кривой
График
функции
можно рассматривать как реакцию
некоторого вспомогательного (фиктивного)
объекта с самовыравниванием на
скачкообразное воздействие с амплитудой![]() .
Тогда передаточную функцию этого объекта
.
Тогда передаточную функцию этого объекта
![]() можно
записать следующим образом
можно
записать следующим образом
 ,
(10)
,
(10)
где
![]() =
=![]() .
(11)
.
(11)
Параметры передаточной функции могут быть найдены по основной схеме метода площадей для объекта с самовыравниванием.
Запишем изображение по Лапласу функции
![]() =
=![]() =
=
![]() =
=

![]() ,
(12)
,
(12)
или
= . (13)
Рассмотрим
теперь график функции
![]() .
Его можно рассматривать как реакцию
(кривую разгона) идеального интегрирующего
звена на тоже самое скачкообразное
воздействие с амплитудой
.
Определим изображение по Лапласу функции
.
Его можно рассматривать как реакцию
(кривую разгона) идеального интегрирующего
звена на тоже самое скачкообразное
воздействие с амплитудой
.
Определим изображение по Лапласу функции
![]() =
=![]() =
=
![]() =
=
![]() (14)
(14)
Преобразуем последнее выражение следующим образом
=![]() =
=
![]() (15)
(15)
Передаточная функция соответствует идеальному интегрирующему звену.
Из
формул (14) и (15) следует, что
![]() ,
отсюда определяем
,
отсюда определяем
![]()
![]() (16)
(16)
Передаточная функция соответствует идеальному интегрирующему звену.
Преобразуем теперь по Лапласу уравнение (9), в результате получим
![]() =
–
(17)
=
–
(17)
Подставляя в последнее уравнение
=![]() (18)
(18)
и значения и из уравнений(15) и (13) получим
= = – . (19)
Сократив на общий множитель получим формулу для передаточной функции объекта с самовыравниванием
= – (20)
Учитывая запаздывание получим окончательно
=(
–
)
![]() (21)
(21)
Выражение в скобках необходимо привести к общему знаменателю.
Передаточной функции (модели) (21) соответствует структурная схема, приведенная на рисунке 11.

![]()
Рисунок 11 – Структурная схема модели объекта без самовыравнивания
Таким образом, определение модели объекта без самовыравнивания осуществляется в следующей последовательности:
Выделяется запаздывание и строится кривая разгона в отклонениях, рисунок 8;
Строится асимптота к кривой разгона, рисунок 9;
Определяется коэффициент наклона к асимптоте А1, формула (8)
A1 ;
Определяется коэффициент усиления интегратора К1, формула (16)
;
Строится вспомогательная кривая разгона , рисунок 10,
=
Определяется коэффициент усиления вспомогательного объекта, формула (11)
= ;
Методом площадей Симою М.П. определяются параметры передаточной функции
Еще раз напомним, что метод площадей будет описан ниже.
По формуле (21) определятся передаточная функция объекта без самовыравнивания
= ( – ) .
Выражение в скобках необходимо привести к общему знаменателю.
3.3 Определение параметров модели по площадям
В настоящем разделе будет описана процедура определения параметров передаточной функции модели объекта с самовыравниванием. Для вывода основных формул использован подход, предложенный в работе.
Рассмотрим инверсную передаточную функцию модели
 .
(22)
.
(22)
Разложим
![]() в
ряд Тейлора в точке s=0:
в
ряд Тейлора в точке s=0:
 , (23)
, (23)
где
![]() =S0=1.
=S0=1.
Коэффициенты
разложения
![]() названы М.П.Симою площадями [1].
названы М.П.Симою площадями [1].
При известных площадях легко определяются коэффициенты передаточной функции ai, bi.
Для
этого умножим обе части равенства (23)
на знаменатель
![]() .
В результате получим
.
В результате получим
![]() . (24)
. (24)
Раскрывая скобки в правой части (24) и приводя подобные члены получим степенной ряд
![]()
![]() Приравнивая
в последнем равенстве коэффициенты при
одинаковых степенях s
слева и справа, получим линейную систему
уравнений для определения коэффициентов
модели
:
Приравнивая
в последнем равенстве коэффициенты при
одинаковых степенях s
слева и справа, получим линейную систему
уравнений для определения коэффициентов
модели
:
 (25)
(25)
Для определения коэффициентов необходимо N =m + n уравнений и такое же количество площадей. Поскольку, как правило, порядок модели заранее не известен, необходимо задаваться порядком модели.
Рассмотрим частные случаи:
1.
![]() . (26)
. (26)
В
зтом случае
![]() и для определения параметров модели
достаточно знать N=n
площадей, система (26) приводится к виду
и для определения параметров модели
достаточно знать N=n
площадей, система (26) приводится к виду
![]() (27)
(27)
Простейшими моделями такого вида являются:
1.1.
![]() (28)
(28)
1.2.
![]() (29)
(29)
1.3.
![]() (30)
(30)
Необходимо иметь в виду, что все используемые площади должны быть положительными. В противном случае модель не устойчива (критерий Стодолы).
2.
![]() .
(31)
.
(31)
Для определения 3-х коэффициентов необходимо 3 уравнения. Система (25) принимает вид:
 (32)
(32)
Из
последнего уравнения системы (32) находим
![]() ,
подставляя в первые два находим
,
подставляя в первые два находим
![]() .
.
3.
![]() . (33)
. (33)
 (34)
(34)