

3 Метод площадей Симою
Для определения параметров модели кривая разгона преобразуется к расчетной. Процедура приведения кривой разгона к расчетной зависит от динамических свойств объекта. Для практических целей представляют интерес два случая:
объект регулирования с самовыравниванием (пропорциональный).
– объект регулирования без самовыравнивания (интегральный).
3.1 Объект регулирования с самовыравниванием
На рисунке 4 приведена типичная кривая разгона объекта с самовыравниванием, полученная экспериментально.
Для
получения кривой разгона в АСР
устанавливается номинальный статический
режим
![]() Затем система переводится в ручной
режим (регулятор отключается, обратная
связь разрывается) и на объект регулирования
в момент времени
Затем система переводится в ручной
режим (регулятор отключается, обратная
связь разрывается) и на объект регулирования
в момент времени
![]() с
помощью задатчика подается скачкообразное
воздействие. Например, скачком изменяется
давление на пневматический исполнительный
механизм (клапан). Изменение давления
приводит к перемещению регулирующего
органа (шток, заслонка и т. д.) и как
следствие к изменению потока энергоносителя
или реагента и соответствующему изменению
регулируемой величины
с
помощью задатчика подается скачкообразное
воздействие. Например, скачком изменяется
давление на пневматический исполнительный
механизм (клапан). Изменение давления
приводит к перемещению регулирующего
органа (шток, заслонка и т. д.) и как
следствие к изменению потока энергоносителя
или реагента и соответствующему изменению
регулируемой величины
![]() ,
рисунок 1.
,
рисунок 1.
Величина запаздывания определяется непосредственно по кривой разгона, рисунок 1, как время, за которое отклонение выходной величины y(t) после нанесения входного воздействия не превышает 0,5% 1% от yуст..
Коэффициент усиления определяется по формуле:
![]() (4)
(4)
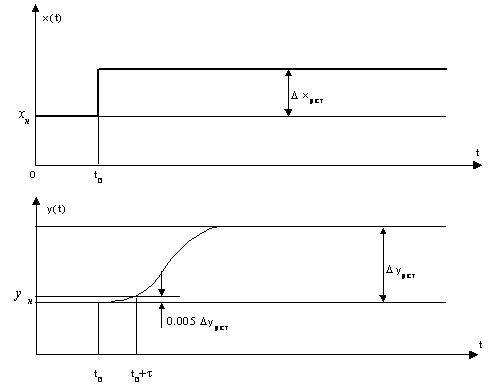
Рисунок 4 – Кривая разгона объекта с самовыравниванием
Перенося начало координат в точку t=t0+, y=y0 и исключая таким образом запаздывание, получим расчетную кривую разгона, рисунок 5.
Переходная кривая, рисунок 5, является исходной для расчета параметров модели по программе.
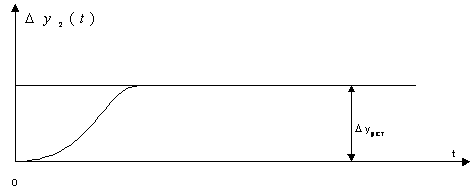
Рисунок 5 – Кривая разгона объекта с самовыравниванием в отклонениях
Для расчета параметров модели методом площадей целесообразно ввести нормированную кривую разгона (переходную характеристику), рисунок 6, определяемую формулой
![]() (5)
(5)
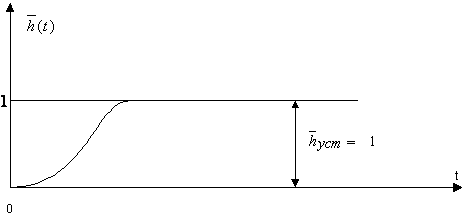
Рисунок 6 – Расчетная кривая объекта с самовыравниванием
Переходную
кривую
![]() ,
рисунок 6, можно рассматривать как
реакцию динамического звена с нормированной
передаточной функцией вида
,
рисунок 6, можно рассматривать как
реакцию динамического звена с нормированной
передаточной функцией вида

Тогда изображение по Лапласу можно записать следующим образом
![]() (6)
(6)
Параметры модели (2) могут быть определены по нормированной кривой разгона.
3.2 Объект регулирования без самовыравнивания
Кривая разгона объекта без самовыравнивания приведена на рисунке 7.

x(t)

y(t)
Как следует из рисунка 7 кривая разгона является характеристикой интегрирующего типа и может быть описана моделью следующего вида

Для предотвращения аварийных ситуаций при проведении эксперимента в случае объекта без самовыравнивания входное воздействие необходимо вернуть к первоначальному значению после того как выходной сигнал начнет изменяться с постоянной скоростью.
Как и ранее переносим начало координат в точку t=t0+, y=yн, исключаем запаздывание и получим кривую разгона в отклонениях, рисунок 5.

Рисунок 8 – Кривая разгона объекта без самовыравнивания в отклонениях
Для определения параметров модели объекта без самовыравнивания методом площадей Симою М.П. необходимы некоторые преобразования. Модель объекта представляется как параллельное соединение идеального интегрирующего звена и некоторого пропорционального звена (звена с самовыравниванием). Коэффициент усиления интегратора, как будет показано ниже, определяется просто, а параметры пропорционального звена определяются методом Симою М.П. Для этой цели проделаем следующие преобразования, рисунок 9.
y1(t)
y(t)
y(t)

y(t)




y(t)


t
t
t
0
Рисунок 9 – Преобразование кривой разгона объекта без самовыравнивания
Проведем из начала координат прямую y1(t) параллельную асимптоте кривой разгона. Уравнение этой прямой
y1(t)=A1t (7)
Коэффициент наклона прямой A1 определяется согласно рисунку 6 по формуле
A1
![]() (8)
(8)
Введем
в рассмотрение функцию
![]() ,
определяемую формулой
,
определяемую формулой
![]() =
=![]() (9)
(9)