

Розрахунок систем з еом у контурі керування
Мета заняття. Вивчити методику розрахунку систем з ЕОМ у контурі керування.
Цифрові системи управління мають квантування за часом, що відносить їх до класу імпульсних систем, і квантування по рівню, що робить|чинить| їх нелінійними. Існуючі методи дослідження нелінійних систем порівняно| мало придатні для цифрових систем. Методи фазового| простору|простір-час| і фазової площини|площини| можуть застосовуватися до порівняно простих нсистем, зазвичай|звично|, |винятком таких що не мають практичного значення|. Метод гармонійної лінеаризації виявляється| тут порівняно складним внаслідок|внаслідок| необхідності| врахування|урахування| впливу квантування за часом. Ускладнення також викликає|спричиняє| безперервний зсув|зміщення| початкових точок відліку на нелінійних статичних характеристиках вхідних| і вихідних перетворювачів, викликаний|спричиняти| змінними| зовнішніми діями. Інші аналітичні методи дослідження також ще поки малоефективні|.
Тому основним методом дослідження цифрових систем управління є|з'являється| їх моделювання на універсальних цифрових обчислювальних машинах і на аналого-цифрових комплексах. Проте|однак| таке моделювання не може проводитися без паралельного аналітичного дослідження|, призначеного для обгрунтування структури проектованої системи, визначення основних її параметрів,| якісних показників і попереднього вибору всіх елементів. При цьому аналітичні методи можуть допускати|передбачати| винесення складних розрахунків на обчислювальну| техніку з метою заощадження часу і можливого перегляду|проглядати| великої кількості варіантів.
Все це висуває до можливих аналітичних методів вимоги високої ефективності і осяжності отримуваних|одержувати| результатів. Найбільш придатними тут виявляються|опиняються| методи розрахунку, засновані на розгляді лінеаризованих| імпульсних систем з врахуванням|з врахуванням| впливу, здійснюваного| квантуванням по рівню, у вигляді додаткових шумів квантування або у вигляді додаткових періодичних| режимів.
Слід також відмітити|помітити|, що різноманіття можливих додаткових режимів в цифровій системі управління і їх безперервний перехід від одного вигляду|виду| до іншого робить|чинить| всю картину вельми|дуже| складною, такою, що погано піддається аналізу навіть при моделюванні подібних систем на ЕОМ.
Методи дослідження цифрових систем управління дозволяють до переходу на моделювання проектованої системи провести|виробляти| оцінку очікуваних|сподіваних| результатів і вирішити питання про доцільність побудови| системи по вибраній структурі.
Задача1.
Для
системи регулювання при врахуванні
засового запізнення
![]() ,
яке вноситься ЕОМ (рис. 7.1), визначити
дискретні передаточні функції розімкнутої
та замкнутої системи.
,
яке вноситься ЕОМ (рис. 7.1), визначити
дискретні передаточні функції розімкнутої
та замкнутої системи.
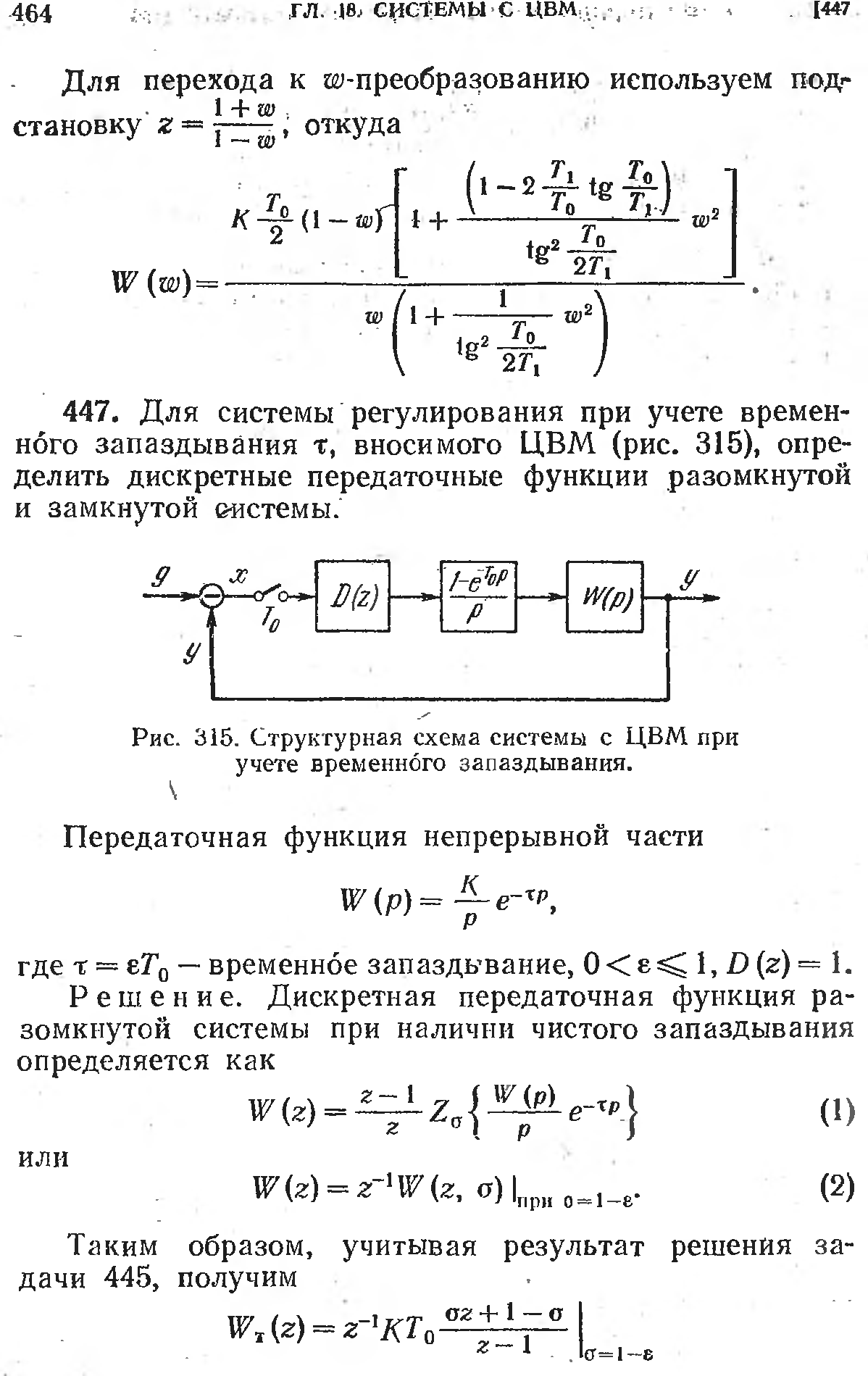
Рис.7.1. Структурна схема системи з ЕОМ при врахуванні часового запізнення
Передаточна функція неперервної частини
![]() ,
,
де
![]() - часове запізнення,
- часове запізнення,
![]() ,
,
![]() .
.
Розв’язок. Дискретна передаточна функція розімкнутої системи при наявності часового запізнення визначається як

або
![]()
Таким чином, отримаємо
![]() ,
,
або

Практичне заняття №8.