

5. 3. Дослiдження руху невiльної матерiальної точки в осях натурального тригранника
Розглянемо рух матерiальної точки маси m на заданiй нерухомiй iдеально гладенькiй поверхнi під дією активних сил (рис. 5.2). Прикладом такого руху може бути рух кульки в криволiнiйнiй трубцi. Рух цiєї невiльної матерiальної точки у векторнiй формi запишеться у виглядi рiвняння (5.4). В проекцiї на осi натурального тригранника - дотичну τ, головну нормаль n i бiнормаль b до кривої S – одержимо:
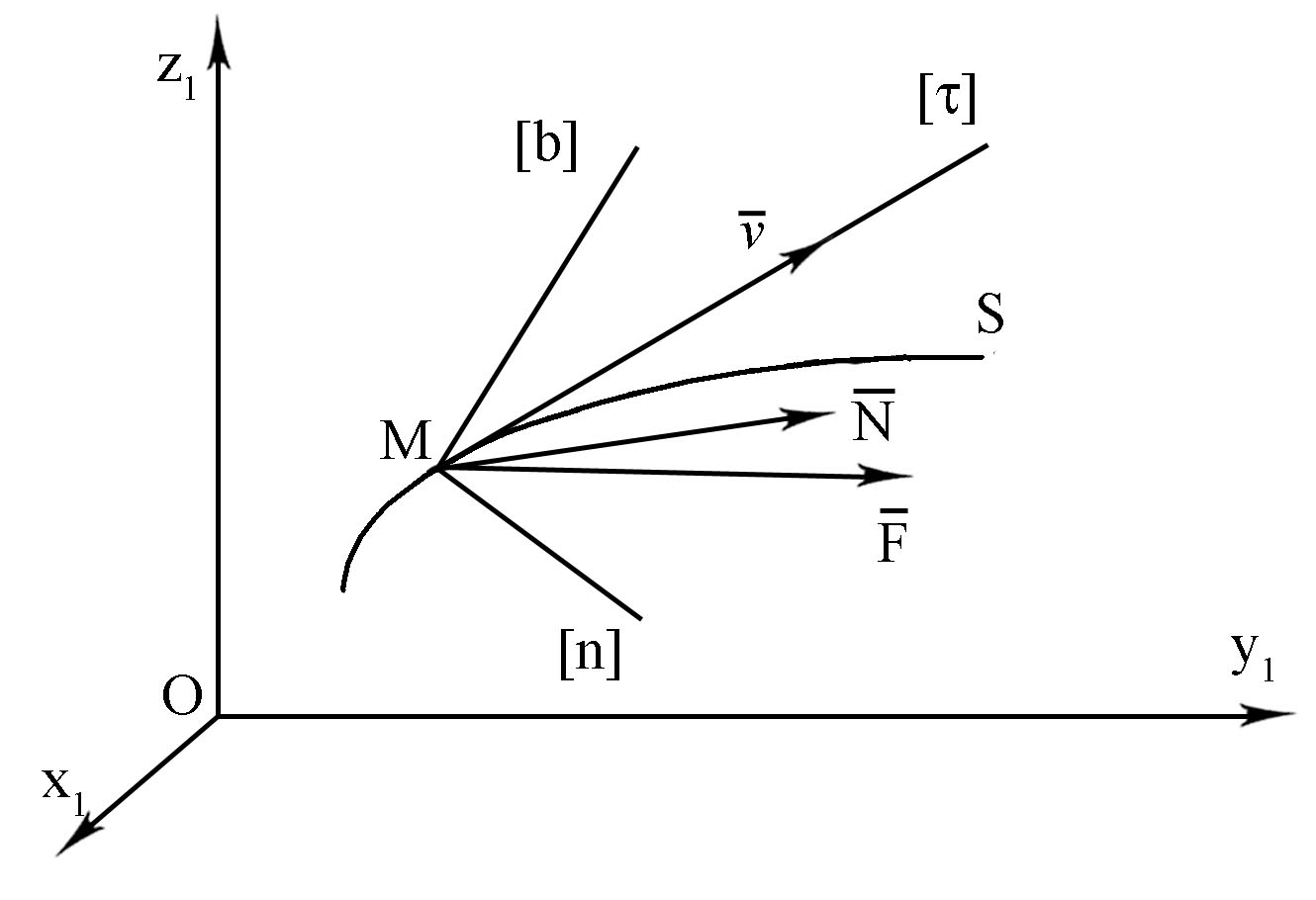
Рис.
5. 2.
![]() (5.13)
(5.13)
В цьому випадку реакцiя в’язi перпендикулярна до заданої кривої, тобто розташована в площинi Mbn.
Рiвняння (5.13) називаються диференцiальними рiвняннями криволiнiйного руху невiльної матерiальної точки в проекцiях на осi натурального тригранника або рiвняннями у формi Ейлера.
Друге рiвняння системи рiвнянь (5.13) показує, що реакцiя в’язi при русi (динамiчна реакцiя) залежить не тiльки вiд вигляду в’язi i прикладених активних сил, як в статицi, але й вiд швидкостi руху.
Рiвняння (5.13) бiльш зручнi за рiвняння (5.10) i (5.12), бо вони дозволяють розв’язувати задачi про визначення закону руху точки i визначення реакцiї в’язi незалежно одна вiд одної. Дiйсно, перше рiвняння не включає невiдому реакцiю i дозволяє шляхом iнтегрування визначити швидкiсть точки i закон руху точки вздовж заданої кривої, тобто S = S(t); два iнших рiвняння дозволяють знайти складовi реакцiї Nn i Nb. Але рiвняння в декартових координатах можна одержати i без припущення про стацiонарнiсть в’язi, тому вони є бiльш загальними.
Якщо рух матерiальної точки вiдбувається на заданiй iдеально гладенькiй кривiй i на матерiальну точку дiє активна сила , що лежить з цiєю кривою в однiй площинi, то реакцiя в’язi направлена по нормалi до кривої i лежить з нею в однiй площинi. В цьому разi рiвняння (5.13) набувають вигляду:
![]() (5.14)
(5.14)
Рiвняння в формi Ейлера можна використати i в тому випадку, коли матерiальна точка рухається на заданiй нерухомiй шорсткiй кривiй. При цьому необхiдно додати проекцiю сили тертя Fτ теp = μN.
§6. Диференцiальнi рiвняння вiдносного руху матерiальної точки
6. 1. Основна задача динамiки вiдносного руху матерiальної точки
Рух матерiальної точки по вiдношенню до iнерцiальної системи вiдлiку, тобто такої системи, для якої справедливi основнi закони динамiки Ньютона, називається абсолютним.
Розглянемо рух матеріальної точки маси m по відношенню до неінерціальної системи відліку Оxyz, тобто до системи, яка рухається з прискоренням відносно інерціальної системи відліку О1x1y1z1 (рис. 6.1).
Рух точки М вiдносно неiнерцiальної системи вiдлiку називається вiдносним.
О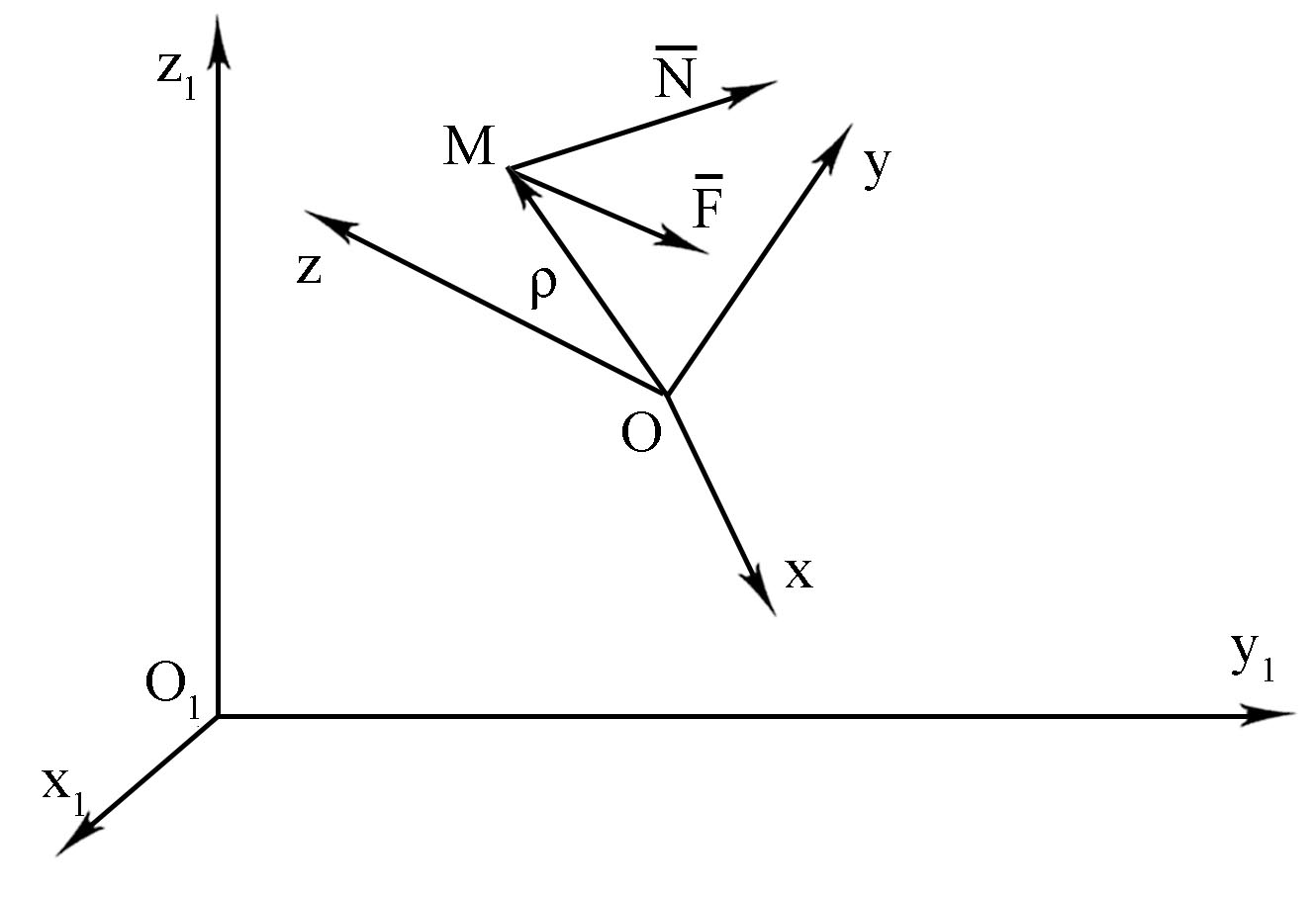 сновна
задача
динамiки вiдносного руху матерiальної
точки формулюється так. Нехай система
вiдлiку Oxyz
рухається
вiдносно нерухомої системи O1x1y1z1
за
вiдомим законом, тобто для будь-якого
моменту часу нам вiдомi прискорення апер
= аО
точки
O,
а також переносна кутова швидкiсть ωпер
i
переносне кутове прискорення εпер
системи вiдлiку Oxyz
вiдносно системи вiдлiку O1x1y1z1.
Знаючи
сили, якi дiють на точку М,
а також початковi умови руху точки М
i системи вiдлiку Oxyz,
потрiбно знайти закон вiдносного руху
точки М.
сновна
задача
динамiки вiдносного руху матерiальної
точки формулюється так. Нехай система
вiдлiку Oxyz
рухається
вiдносно нерухомої системи O1x1y1z1
за
вiдомим законом, тобто для будь-якого
моменту часу нам вiдомi прискорення апер
= аО
точки
O,
а також переносна кутова швидкiсть ωпер
i
переносне кутове прискорення εпер
системи вiдлiку Oxyz
вiдносно системи вiдлiку O1x1y1z1.
Знаючи
сили, якi дiють на точку М,
а також початковi умови руху точки М
i системи вiдлiку Oxyz,
потрiбно знайти закон вiдносного руху
точки М.
Рис.
6. 1.
Для розв’язання цiєї задачi треба спочатку скласти диференцiальне рiвняння вiдносного руху точки М, а потiм, проiнтегрувавши це рiвняння, знайти закон вiдносного руху точки.
За другим законом Ньютона для руху точки вiдносно iнерцiальної системи вiдлiку
m = + , (6.1)
де - абсолютне прискорення точки М, - рiвнодiюча активних сил, що дiють на точку М, - реакцiя в’язi.
Абсолютне прискорення точки за теоремою Корiолiса :
![]() ,
(6.2)
,
(6.2)
де aвід, aпер, aкор - вiдносне, переносне i корiолiсове (поворотне) прискорення точки М вiдповiдно.
Пiдставимо в рiвняння (6.1) значення прискорення з (6.2) i одержимо
m![]() =
+
+(
m
=
+
+(
m![]() )+(
m
)+(
m![]() ).
(6.3)
).
(6.3)
Сила,
рiвна добутку маси рухомої точки та її
переносного прискорення i направлена
протилежнo до цього прискорення,
називається переносною
силою iнерцiї
![]() :
:
= m . (6.4)
Сила,
рiвна добутку маси рухомої матерiальної
точки та її корiолiсового прискорення
i направлена протилежно до цього
прискорення, називається корiолiсовою
або
поворотною
силою iнерцiї
![]() :
:
= m . (6.5)
Рiвняння (6.3) можна переписати так:
m = + + + . (6.6)
Це рiвняння є основним законом динамiки у векторнiй формi для вiдносного руху невiльної матерiальної точки. В загальному випадку
=
![]() +
+![]() ´(
´
´(
´![]() )+
)+![]() ´
;
(6.7)
´
;
(6.7)
=
2(
´![]() ),
(6.8)
),
(6.8)
де - радiус-вектор, що визначає положення матерiальної точки М вiдносно початку O рухомої системи Oxyz.
Порiвнюючи рiвняння (6.6) i (6.1), приходимо до такого висновку: основне рiвняння динамiки вiдносного руху матерiальної точки можна скласти так, як i основне рiвняння динамiки абсолютного руху точки (6.1), якщо тiльки до дiючих на точку сил i додати переносну i корiолiсову сили iнерцiї і .
В проекцiях на осi системи вiдлiку Oxyz маємо
![]() =
,
=
,
![]() =
,
=
,
![]() =
=
![]() ;
;
![]()
![]() (6.9)
(6.9)
![]() .
.
Аналогiчно можна одержати рiвняння вiдносного руху точки в проекцiях на осi натурального тригранника.
Розглянемо
вiдносний спокiй тiла поблизу Землi. На
пiдвiшений до нитки тягар дiють двi сили:
сила притягання тiла Землею
i
сила натягу нитки
![]() .
Сила
направлена вздовж радiусу до центру
земної кулi i, згiдно закону всесвiтнього
тяжiння, дорівнює
.
Сила
направлена вздовж радiусу до центру
земної кулi i, згiдно закону всесвiтнього
тяжiння, дорівнює
![]()
З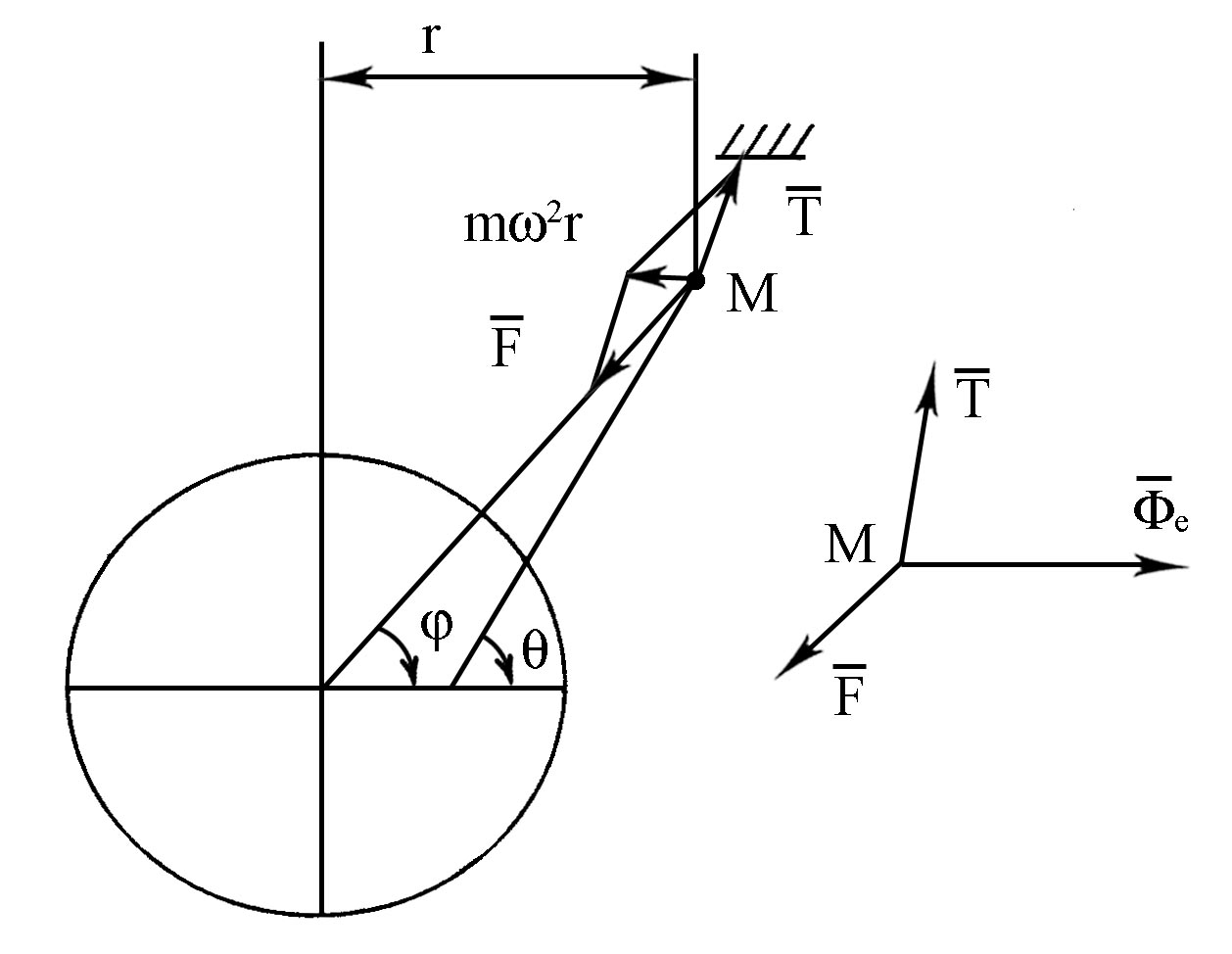 авдяки
добовому обертанню Землi пiдвiшений до
нитки тягар перебуває у рiвномiрному
русi по колу радiусу r
= Rзcosφ
i, отже, на тягар дiє доцентрова сила
mω2r,
яка направлена до центра С
кола
добового обертання.
авдяки
добовому обертанню Землi пiдвiшений до
нитки тягар перебуває у рiвномiрному
русi по колу радiусу r
= Rзcosφ
i, отже, на тягар дiє доцентрова сила
mω2r,
яка направлена до центра С
кола
добового обертання.
У даному разi доцентрова сила mω2r є геометричною сумою сил i .
Лiнiя, вздовж якої розмiщується висок (нитка з тягарем), називається вертикаллю.
Вертикаль утворює з площиною екватора кут θ, який називається географiчною широтою того мiсця, де пiдвiшений тягар.
Основне рiвняння вiдносного спокою одержимо з рiвняння (6.6), якщо в ньому прийняти
vвід = 0; aвід = 0; = m·2( ´ ) = 0,
що дає
+ + = 0. (6.10)
З рівняння (6.10) бачимо, що вiдносний рух iснує тодi, коли прикладенi сили i зрiвноваженi переносною силою iнерцiї .
Отже, у випадку вiдносного спокою матерiальної точки геометрична сума трьох сил - активної , пасивної i переносної сили iнерцiї - дорiвнює нулю.