

Глава 25
МАГНИТНЫЕ УСИЛИТЕЛИ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
§ 25.1. Многокаскадный магнитный усилитель
Д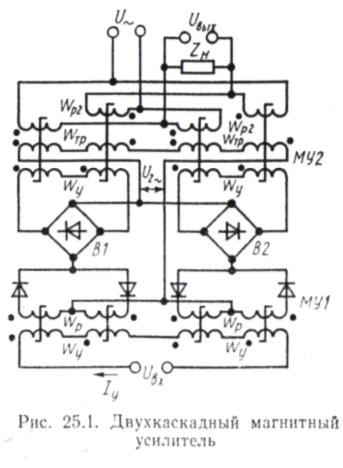 ля
получения больших коэффициентов усиления
используется последовательное соединение
нескольких магнитных усилителей. В этом
случае выходной сигнал предыдущего
усилителя является входным сигналом
последующего. Такое соединение усилителей
называют каскадным, а каждый из усилителей
— каскадом. Электромагнитное устройство
в целом называют многокаскадным магнитным
усилителем. Общий коэффициент усиления
многокаскадного магнитного усилителя
равен произведению коэффициентов
усиления отдельных каскадов. Число
отдельных каскадов в магнитном усилителе
может достигать 5—6. При этом инерционность
многокаскадного усилителя определяется
постоянной времени, представляющей
собой сумму постоянных времени отдельных
каскадов. Поэтому многокаскадные
усилители находят применение и в тех
случаях, когда необходимо уменьшить
инерционность усилителя при заданном
коэффициенте усиления.
ля
получения больших коэффициентов усиления
используется последовательное соединение
нескольких магнитных усилителей. В этом
случае выходной сигнал предыдущего
усилителя является входным сигналом
последующего. Такое соединение усилителей
называют каскадным, а каждый из усилителей
— каскадом. Электромагнитное устройство
в целом называют многокаскадным магнитным
усилителем. Общий коэффициент усиления
многокаскадного магнитного усилителя
равен произведению коэффициентов
усиления отдельных каскадов. Число
отдельных каскадов в магнитном усилителе
может достигать 5—6. При этом инерционность
многокаскадного усилителя определяется
постоянной времени, представляющей
собой сумму постоянных времени отдельных
каскадов. Поэтому многокаскадные
усилители находят применение и в тех
случаях, когда необходимо уменьшить
инерционность усилителя при заданном
коэффициенте усиления.
Рассмотрим
схему двухкаскадного реверсивного
усилителя с выходным переменным
током (рис. 25.1). Схема каждого из каскадов
(![]() и
и
![]() )
ана-
)
ана-
логична рассмотренной в гл. 24 дифференциальной схеме реверсивного усилителя. Такой усилитель может использоваться для управления исполнительным двухфазным асинхронным электродвигателем.
На
выходе первого каскада (![]() )
включены
мостовые выпрямители
)
включены
мостовые выпрямители
![]() и
и
![]() , предназначенные для питания обмоток
управления второго каскада (
, предназначенные для питания обмоток
управления второго каскада (![]() ).
Нагрузка
).
Нагрузка
![]() переменного
тока включена на выходе второго каскада.
Напряжение питания первого каскада
переменного
тока включена на выходе второго каскада.
Напряжение питания первого каскада
![]() снимается
со специальных трансформаторных
обмоток
снимается
со специальных трансформаторных
обмоток![]() ,
намотанных на сердечниках
,
намотанных на сердечниках
![]() таким
образом, что наводимые в них из рабочих
обмоток
таким
образом, что наводимые в них из рабочих
обмоток
![]() ЭДС
складываются. Поэтому напряжение
ЭДС
складываются. Поэтому напряжение
![]() не
зависит от изменяющихся
напряжений на отдельных обмотках
не
зависит от изменяющихся
напряжений на отдельных обмотках![]() .
Это напряжение остается пропорциональным
напряжению питания сети
.
Это напряжение остается пропорциональным
напряжению питания сети![]() .
Следовательно, в данной схеме не нужен
отдельным трансформатор питания.
.
Следовательно, в данной схеме не нужен
отдельным трансформатор питания.
В основном инерционность многокаскадного усилителя определяется инерционностью первого каскада. Поэтому первый каскад обычно выполняют с небольшим коэффициентом усиления и малой постоянной времени. Л необходимый общий коэффициент усиления стремятся получать за счет последующих каскадов. В итоге инерционность, например, двухкаскадного усилителя будет меньше, чем инерционность однокаскадного усилителя одинаковой мощности с тем же коэффициентом усиления.
Пример
25.1. Определить постоянную времени
однокаскадного магнитного усилителя
с положительной обратной связью
при
![]() ;
;
![]() ;
;
![]() Гц.
Гц.
Определить
постоянную времени двухкаскадного
усилителя, работающего на той же частоте
и с таким же коэффициентом обратной
связи, но с коэффициентами
усиления первого каскада
![]() и
второго каскада
и
второго каскада
![]() ,
обеспечивающими общий коэффициент
усиления
,
обеспечивающими общий коэффициент
усиления
![]() .
Сравнить эти постоянные времени, полагая
для простоты КПД
.
Сравнить эти постоянные времени, полагая
для простоты КПД![]()
![]()
Постоянная времени однокаскадного усилителя
![]() с.
с.
Из (23.6) получим выражение для постоянной времени при положительной обратной связи
Постоянную времени двухкаскадного усилителя определяем как сумму постоянных времени каждого каскада:
![]()
![]()
Как видно из данного примера, инерционность двухкаскадного усилителя при том же усилении уменьшается в 30 раз. Для уменьшения инерционности используют питание первых каскадов повышенной частотой и лишь последний (выходной) каскад питают напряжением той частоты, на которую рассчитана нагрузка.