

1. Проектирование кулачкового механизма
1.1. Структурный анализ
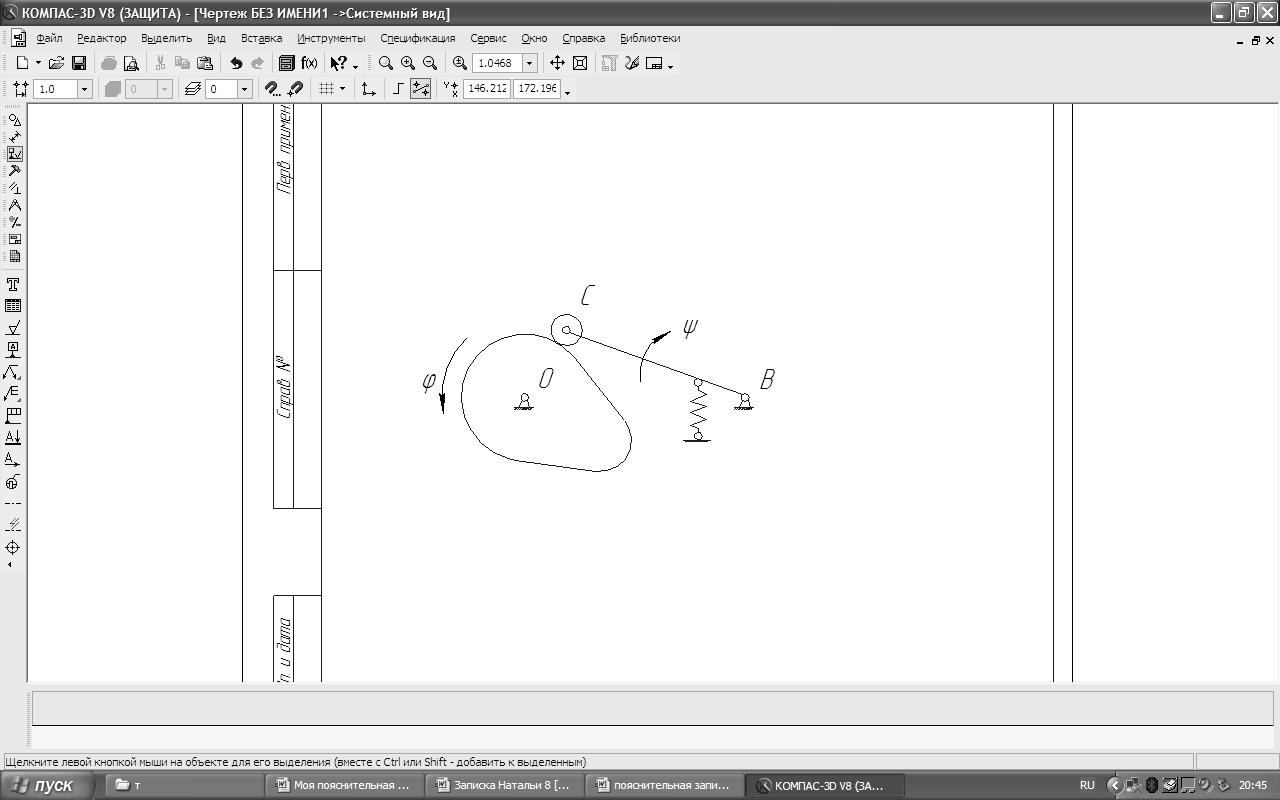
Рис. 1 Схема кулачкового механизма подачи материала на конвейер

Рис. 2 Закон изменения аналога ускорения коромысла кулачкового механизма
Кулачковым механизмом называется механизм, в состав которого входит кулачок. Кулачком называется звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. Кулачок обычно является исходным звеном. Выходное звено называется толкателем, если оно совершает возвратно-прямолинейное движение, или коромыслом, если совершает возвратно-вращательное (качательное) движение.
Полный цикл движения толкателя включает фазы удаления (от кулачка) и возвращения, осуществляемые при повороте кулачка соответственно на углы φу и φв. Между ними могут быть дальний и (или) ближний выстои (соответствующие углы – φд.с. и φб.с.).
1.2. Определение фазовых углов кулачка
Выбираем прямоугольную систему
координат
 .
По оси абсцисс откладываем фазовые углы
φу,
φв,
φдс. Отрезок,
изображающий угол давления φу
на чертеже выбран равным 60 (мм). Тогда
масштабный коэффициент углов поворота
кулачка будет равен
.
По оси абсцисс откладываем фазовые углы
φу,
φв,
φдс. Отрезок,
изображающий угол давления φу
на чертеже выбран равным 60 (мм). Тогда
масштабный коэффициент углов поворота
кулачка будет равен
 ;
;
Углы поворота кулачка соответствуют этим промежуткам времени:
φу – фаза удаления
φдс – фаза дальнего стояния
φв – фаза возврата
φу = φв =60˚
φдс=50˚
1.3. Построение кинематических диаграмм движения толкателя
Закон движения коромысла (Рис.2) задан в виде графика аналога ускорений. Методом графического интегрирования строим сначала график аналога скоростей, а затем график аналога перемещений.
Определяем масштабные коэффициенты графиков:
μφ= ;
;
μφ= 0.02
 ;
;
μS= ;
;
μS=0.003
 ;
;
 ;
;
 ;
;
 ;
;
 0.05
0.05
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

1.4. Определение основных размеров кулачкового механизма
Угол α между нормальной силой P
и скоростью
 толкателя называется углом давления.
Угол
толкателя называется углом давления.
Угол
 называется углом передачи.
называется углом передачи.
Формула для определения угла давления:
 ;
;
 ;
;
e – смещение, S – перемещение толкателя, r0 – минимальный радиус-вектор кулачка.
Как видно из последней формулы, с
уменьшением радиус-вектора угол давления
увеличивается, что приводит к увеличению
давления и силы трения в паре
толкатель-направляющая, а при достаточно
больших углах давления – и к заклиниванию.
В этой связи угол давления α в механизме
должен быть больше не больше максимально
допустимого
 ,
т.е.
,
т.е.
 (или
(или
 ),
что обеспечивается условием
),
что обеспечивается условием
 ,
где
,
где
 – минимально допустимый угол передачи,
– минимально допустимый угол передачи,
 - минимально допустимый радиус-вектор
кулачка.
- минимально допустимый радиус-вектор
кулачка.
Минимальный радиус-вектор кулачка
определяют по зависимости
 .
.
1.5. Построение диаграммы изменения угла давления
LCB= 0.11 (м) и углу размаха толкателя γ=35˚ определяют ход конца толкателя B:
 ;
;
Из центра С вращения коромысла проводим
дугу окружности радиусом 110 мм. От точки
B0 по этой дуге
откладывают перемещения точки В, взятые
в виде ординат
 с графика перемещений. Полученные точки
В1, В2, В3, В4 и
т.д. соединяют с центром С и вдоль этих
лучей от точек
с графика перемещений. Полученные точки
В1, В2, В3, В4 и
т.д. соединяют с центром С и вдоль этих
лучей от точек
 откладывают отрезки
откладывают отрезки
 изображающие аналоги скоростей в
натуральную величину. Плавная кривая,
соединяющая точки
изображающие аналоги скоростей в
натуральную величину. Плавная кривая,
соединяющая точки
 ,
есть диаграмма характеристик углов
давления. Минимальные габариты кулачкового
механизма находят с использованием
этой диаграммы. Под заданным допустимым
углом давления γдоп=35˚ проводят
через точки
лучи, которые в пересечении образуют
область допустимых положений центра
вращения кулачка.
,
есть диаграмма характеристик углов
давления. Минимальные габариты кулачкового
механизма находят с использованием
этой диаграммы. Под заданным допустимым
углом давления γдоп=35˚ проводят
через точки
лучи, которые в пересечении образуют
область допустимых положений центра
вращения кулачка.