

Линейно нарастающее воздействие
При моделировании воздействие “Step” меняется на “Ramp” – линейно нарастающее воздействие.
Переходный процессы выходной величины Y , ошибки E и сигнала на входе НЭ X приведены на рис. 2.3.

рис.2.3. Переходные процессы при линейно нарастающем воздействии
Значение
установившейся ошибки![]() ,
что соответствует теории. Т.к. мы имеем
систему с астатизмом первого порядка.
,
что соответствует теории. Т.к. мы имеем
систему с астатизмом первого порядка.
По результатам проведённого моделирования можно отметить, что система соответствует расчётному режиму работы, т.к. в системе с астатизмом первого порядка значение установившейся ошибки при линейно нарастающем воздействии стремится к конечному значению.
4.2. Моделирование и анализ системы регулирования при учёте звена запаздывания объекта управления:
Объект управления имеет некоторую инерционность. Эта инерционность в данной системе моделируется в виде разложения экспоненты запаздывания в ряд Тейлора, причём разложение это учитываем в передаточной функции звена объекта управления, которое теперь имеет вид:
![]() ;
;
При моделировании такой системы были получены следующие результаты (см. рис. 2.4).

рис.2.4. Переходные процессы при учёте звена запаздывания
Показатели качества такой реальной системы будут следующими:
Величина времени регулирования процесса – tрег = 1,92 с. ;
Величина перерегулирования – % = 4,7 % ;
4.3. Анализ чувствительности
Действительные значения параметров системы регулирования всегда отличаются от расчетных. Это может выразиться неточностью изготовления отдельных элементов, изменением параметров в процессе хранения и эксплуатации, изменением внешних условий и т.д.
Изменение параметров может привести к изменению статических и динамических свойств системы регулирования. Это обстоятельство необходимо учесть.
Степень влияния изменения отдельных параметров на различные характеристики системы оцениваются посредством чувствительности.
Чувствительность – показатель, который характеризует свойство системы изменять режим работы при отклонении того или иного параметра от исходного значения.
Анализ чувствительности будет проводиться при последовательном изменении параметров объекта управления Т0, k0, 0 на ±20%, ±50% от исходных.
|
Процентное изменение параметров |
Вид изменяемого параметра |
Численное значение параметра |
Время регулирования tрег, с |
Перерегулирование % |
|
Расчётные |
Т0 |
25 |
1,92 с |
4,7% |
|
k0 |
55 | |||
|
0 |
0.1 | |||
|
+ 20 % |
Т0 |
30 |
2,3 с |
0% |
|
k0 |
66 |
2,63 с |
9,6% | |
|
0 |
0.12 |
1,91 с |
5,3% | |
|
- 20 % |
Т0 |
20 |
2,6 с |
9,1% |
|
k0 |
44 |
2,7 с |
0% | |
|
0 |
0.08 |
1,93 с |
4,2% | |
|
+ 50 % |
Т0 |
37,5 |
4,7 с |
0% |
|
k0 |
82.5 |
3,83 с |
18,4% | |
|
0 |
0.15 |
1,91 с |
7,6% | |
|
-50 % |
Т0 |
12,5 |
3,8 с |
27% |
|
k0 |
27,5 |
5,84 с |
0% | |
|
0 |
0.05 |
1,93 с |
1,5% |
Переходные процессы соответствующие изменениям параметров представлены на рисунках 2.4-2.9 (при ступенчатом воздействии и изменении параметров объекта управления на 20% и 50%)

рис.2.4. Переходные процессы при изменении Т0 20%
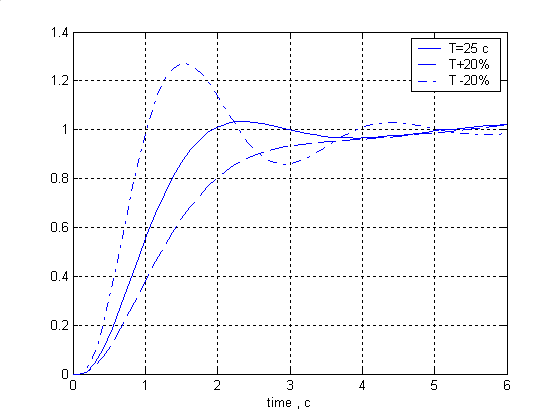
рис.2.5. Переходные процессы при изменении Т0 50%

рис.2.6. Переходные процессы при изменении k0 20%

рис.2.7. Переходные процессы при изменении k0 50%

рис.2.8. Переходные процессы при изменении 0 20%
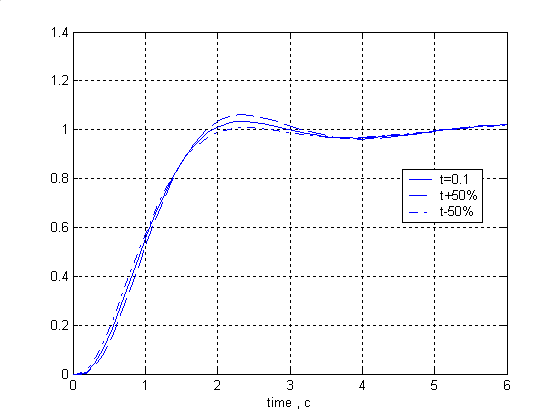
рис.2.9. Переходные процессы при изменении 0 50%
Мы провели исследование поведения системы при различных вариациях
параметров объекта управления. Необходимо, чтобы такие вариации не приводили к большим (качественным) изменениям свойств системы в целом, например, к потере устойчивости. Иными словами, необходимо, чтобы система была грубой.
Система управления должна быть не только инвариантной к возмущающему воздействию и устойчивой, но эти ее свойства также должны быть малочувствительны к вариациям ее параметров.
После анализа можно сказать, что изменение параметров объекта управления от исходных не приводит к качественному изменению в поведении системы.
Система остается устойчивой, но естественно меняется время регулирования и перерегулирование в переходном процессе.
Следовательно, можно сказать, что система с рассчитанным регулятором имеет достаточную грубость к изменению параметров объекта регулирования.