

Расчёт пи-регулятора
Ниже представлены ЛЧХ желаемой разомкнутой системы (см. рис. 1.5.) с включённым в неё ПИ-регулятором и ЛЧХ полученного ПИ-регулятора (см. рис. 1.6.) .

Рис. 1.5. Желаемая ЛЧХ разомкнутой системы

Рис. 1.6. ЛЧХ ПИ-регулятора
Получившийся ПИ-регулятор имеет следующие параметры :
![]()
![]()
![]()
По полученной ЛЧХ разомкнутой системы с ПИ-регулятором можно определить :
Частота
среза : 0.4984
![]() ;
;
Запас по фазе : 45.73 градусов;
Запас по модулю : 12.89 Дб .
Теперь построим переходный процесс замкнутой системы с полученным ПИ-регулятором (см. рис.1.7) .
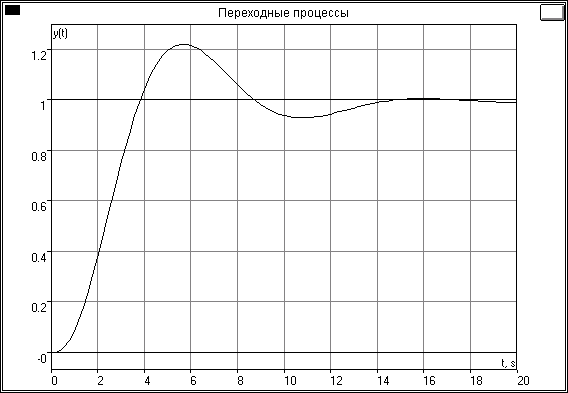
рис.1.7. Переходный процесс замкнутой системы с ПИ-регулятором
По переходной характеристике замкнутой системы определяем :
Установившееся значение : 1.00 ;
Время регулирования : 12.30 c .
Перерегулирование : 22.10% .
По полученным значениям можно сказать что ПИ-регулятор улучшает статические и динамические свойства системы , показатели качества системы удовлетворяют определённым в задании .
После введения ПИ-регулятора статическую ошибка стала равна нулю , уменьшилось значение динамической ошибки более чем в 2 раза .
Расчёт пид-регулятора
Ниже представлены ЛЧХ желаемой разомкнутой системы с включённым в неё ПИД-регулятором (см. рис. 1.8) и ЛЧХ полученного ПИД-регулятора
(см. рис. 1.9) .

Рис. 1.8. Желаемая ЛЧХ разомкнутой системы

Рис. 1.9. ЛЧХ ПИД-регулятора
Получившийся ПИД-регулятор имеет следующие параметры :
![]() ,
,

![]()
По полученной ЛЧХ разомкнутой системы с ПИД-регулятором можно определить :
Частота
среза : 1.03
![]() ;
;
Запас по фазе : 74.93 градусов;
Запас по фазе в системе с ПИД-регулятором стал почти в 3 раза больше, чем в исходной системе и в 1,5 раза больше чем при использовании ПИ-регулятора . Также увеличилась частота среза, что в итоге даст лучшее быстродействие системы .
Теперь построим переходный процесс замкнутой системы с полученным ПИД-регулятором (см. рис.1.10) .
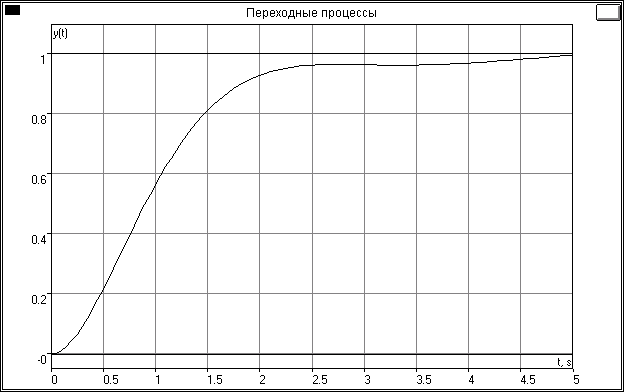
рис.1.10. Переходный процесс замкнутой системы с ПИ-регулятором
По переходной характеристике замкнутой системы определяем :
Установившееся значение : 1.00 ;
Время регулирования : 2.21 c .
Перерегулирование : 0.37 % .
Видно, что при использовании ПИД регулятора более чем в 7 раз увеличилось быстродействие системы .
На основании результатов предварительного расчёта можно сделать вывод что в данной системе использование ПИД-регулятора даёт лучшие показатели качества системы по сравнению с применением ПИ-регулятора .
Таким образом на этапе моделирования системы мы будет использовать ПИД-регулятор .
4. Моделирование системы
Моделирование системы проводится в среде MATLAB\ Simulink. Полная модель, включающая нелинейности, звено эквивалентного возмущения и вспомогательные элементы приведена на рис. 2.1.
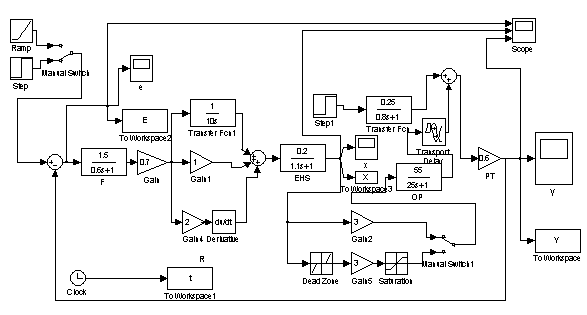
Рис. 2.1. Модель системы в среде MATLAB/Simulink
4.1. Моделирование линейной модели по задающему воздействию
При
моделировании в линейной области
нелинейные элементы заменяются на
линейное усилительное звено с коэффициентом
передачи
![]() .
.
Ступенчатое воздействие
При моделировании в качестве ступенчатого воздействия выступает воздействие “Step”.
Переходный процессы выходной величины Y , ошибки E и сигнала на входе НЭ X приведены на рис. 2.2 .

рис.2.2. Переходные процессы при ступенчатом воздействии
Время регулирования и перерегулирование:

Установившееся
значение ошибки
![]()