

2. Исходные данные для расчета системы:
|
Позиция |
Элементы системы |
Передаточные функции |
Параметры |
|
000 |
Газопламенная печь (ОР) |
|
|
|
010 |
Датчик разности давлений (РТ) |
|
|
|
015 |
Фильтр помех (Ф) |
|
|
|
050 |
Регулятор (R) |
1. ПИ-регулятор
2. ПИД-регулятор
|
|
|
060 |
Серводвигатель (ИУ) |
|
|
|
070 |
Жалюзи (ИО) |
|
|
3. Предварительный расчёт
3.1. Структурная схема системы и математическая модель
Для исследования системы необходимо получить её математическую модель, которую можно получить на основе структурной схемы (рис. 1.1.).
Возм.

R ИУ ИО ОР Ф РТ + + + -












Рис 1.1. Структурная схема системы регулирования
На структурной схеме:
Газопламенная
печь -
![]() ,
,![]() ,
,![]()
![]() [c]
;
[c]
;
Датчик
разности давлений -
![]() ,
,![]() ;
;
Фильтр
помех -
![]() ,
,![]() ,
,
![]() ;
;
Регулятор (R)
1.
ПИ-регулятор
![]() ;
;
2.
ПИД-регулятор
![]() ;
;
Серводвигатель
(ИУ) -
![]() ,
,![]() [
[![]() ],
],
![]() [c];
[c];
Жалюзи
(ИО) -
![]() ,
,![]() [
[![]() ].
].
Передаточная
функция возмущения
-
![]() ,
,![]() ,
,![]() [c].
[c].
При расчёте регулятора мы для простоты расчётов используем модель системы без учёта запаздывания.
М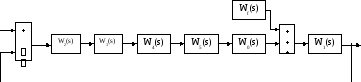 атематическая
модель системы будет иметь следующий
вид : (см. рис.1.2.)
атематическая
модель системы будет иметь следующий
вид : (см. рис.1.2.)
рис.1.2. Математическая модель системы регулирования
3.2. Анализ исходной системы
Для определения характеристик исходной системы проведём её статический расчёт.
Передаточная функция разомкнутой системы
 ;
;
=> ![]() ;
;
2) Передаточная функция замкнутой системы по заданию
 .
.
Построим ЛАЧХ и ФЧХ разомкнутой системы (рис. 1.3.)

Рис.1.3. ЛЧХ разомкнутой системы
По ЛЧХ разомкнутой системы определяем :
Частота
среза : 0.8
![]() ;
;
Запас по фазе : 25.75 градусов;
Запас по модулю : 7.3 Дб .
Из этих значений видно , что система устойчива .
Построим переходный процесс исходной замкнутой системы (см. рис 1.4.) :

Рис1.4. Переходной процесс замкнутой системы
По переходной характеристике замкнутой системы определяем :
Установившееся значение : 0.9674;
Время регулирования : 15.71 c .
Перерегулирование : 49.37% .
3) Посчитаем установившиеся ошибки по заданию и возмущению
a) Передаточная функция ошибки по заданию
 .
.
![]() установившаяся
ошибка по заданию будет равна
установившаяся
ошибка по заданию будет равна
![]()
б) Передаточная функция ошибки по возмущению
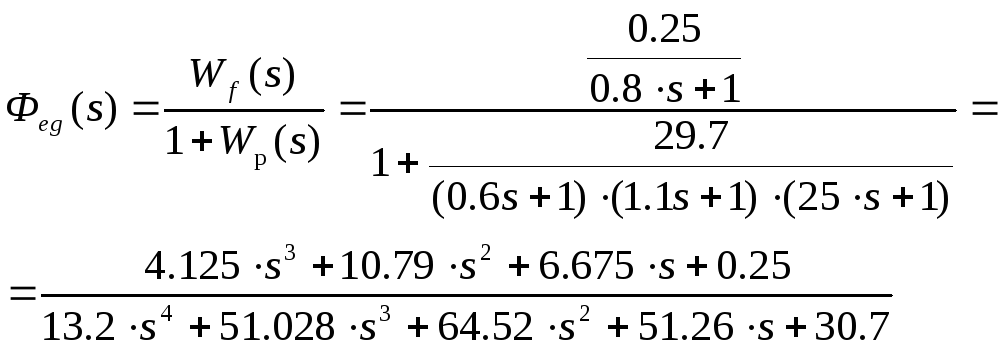
![]() установившаяся
ошибка по возмущению будет равна
установившаяся
ошибка по возмущению будет равна
![]()
Анализируя полученные данные об исходной системе, можно сделать вывод, что хотя она и устойчива , значения её статических и динамических показателей не соответствуют желаемым .
Для улучшения статических и динамических свойств системы и получения лучших показателей качества , необходимо ввести в систему регулятор .
3.3. Расчёт регуляторов
Синтез регулятора будем проводить используя метод частотных характеристик, для чего будем строить желаемую ЛАЧХ системы.
Отметим, что среднечастотный участок желаемой ЛАЧХ определяет основные динамические свойства: время переходного процесса, величину перерегулирования, запас устойчивости по фазе и амплитуде. Построение среднечастотного участка желаемой ЛАЧХ состоит в определении частоты среза, по заданным показателям качества: времени переходного процесса, и величине перерегулирования.
Высокочастотный участок, определяет сглаживающие свойства системы по отношению к помехам. Чем больше наклон высокочастотного участка, тем больше помехоустойчивость системы.
Низкочастотный участок определяет точность системы, на низких частотах система должна иметь наклон –20 дБ/дек, чтобы обеспечить нулевую установившуюся ошибку.
Будем исходить из следующих условий:
система с желаемой ЛАЧХ должна обеспечивать все необходимые показатели качества;
должны быть учтена структура регулятора и диапазон его возможных параметров.