

8.2. Моделирование и методы решения уун
Решение систем нелинейных уравнений, описывающих установившиеся режимы, представляет центральную и наиболее трудоемкую часть алгоритмов расчета на ЭВМ параметров режима. Нахождение их решения через последовательные приближения (итерации) по формуле (8.17) может быть выполнено с помощью различных итерационных процедур, определяемых множеством способов
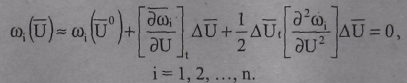
реализации функций ψ(UK). Для получения соответствующих рекуррентных выражений используем квадратичную часть разложения УУН (8.16) в ряд Тейлора

(8.20)
где обобщенные n-мерные
векторы переменных U
и поправок переменных ΔU
включает компоненты
![]() и
и
![]() УУН (8.6) и (8.7) в
прямоугольной системе координат и
компоненты Uiδi
и ΔUi,Δδi
УУН (8.8) и (8.9) в полярной системе
координат.
УУН (8.6) и (8.7) в
прямоугольной системе координат и
компоненты Uiδi
и ΔUi,Δδi
УУН (8.8) и (8.9) в полярной системе
координат.
Перепишем разложение (8.20) в матричном виде. Первые производные {δωj/δUj/j = 1,n } образуют i-ую вектор-строку матрицы Якоби:
![]()
Объединив все п строк,представим матрицу Якоби в виде

Вторые производные i-ro уравнения образуют матрицу Гессе:
 (8.21)
(8.21)
С учетом приведенных матричных обозначений запишем выражение (8.20) в вида
В целом для системы УУН получим
![]() , (8.22)
, (8.22)
где W(U0 ) — вектор небалансов УУН в точке разложения U0 ; [δW/δU]— матрица Якоби, ΔU — вектор с компонентами ΔUi; [δ2W/δU2J — прямоугольная матрица Гессе, число строк в которой равно n; число столбцов — n 2 ; для каждого столбца i(j=l,n) n —столбцов определяются выражением (8.21), U2—вектор с компонентами ΔU,ΔUj, число которых равно n2.
В зависимости от числа членов разложения Тейлора и порядка производных функций небалансов, используемых для моделирования (аппроксимации) УУН и построения рекуррентного выражения итерационного процесса их решения (преобразования) (8.17), различают методы нулевого, первого и второго порядка.
Методы нулевого порядка [44, 46, 55] получаются при использовании в разложении (8.20) только нулевых (начальных) членов, не содержащих производных, что соответствует точечному представлению (точечной аппроксимации) УУН. В данном случае возможно реализовать итерационную процедуру (преобразование) (8.17) в явном виде применительно к УУН баланса токов (8.1). В практических алгоритмах наиболее часто реализуется два метода нулевого порядка: методы Зейделя и Z-матрицы.
1. Метод Z-матрицы. При заданных или известных на очередной итерации напряжениях система нелинейных УУН (8.1) становится линейной следующего вида:
![]()
Эта же система в матричной записи
![]() (8.23)
(8.23)
где компоненты вектора J определяются по формуле
![]() (8.24)
(8.24)
Матричная запись УУН в виде
(8.23) дает возможность реализовать
процедуру (8.17) в явном виде, если
воспользоваться понятием обратной
матрицы и учесть свойства действий с
матрицами. Для неособенной (невырожденной)
матрицы коэффициентов Y
(det
Y![]() 0),
являющейся матрицей узловых и взаимных
проводимостей узлов, существует обратная
матрица Y-1
=Zy,
называемая матрицей собственных и
взаимных сопротивлений узлов (Z
- матрица). Умножая слева обе части
системы (8.23) на Y-1,
получим
0),
являющейся матрицей узловых и взаимных
проводимостей узлов, существует обратная
матрица Y-1
=Zy,
называемая матрицей собственных и
взаимных сопротивлений узлов (Z
- матрица). Умножая слева обе части
системы (8.23) на Y-1,
получим
![]()
Полученные в результате решения СЛУ (8.23) напряжения U(K) следует считать исходными приближениями к искомым напряжениям UK+1 . Поэтому применительно к нелинейной системе (8.1) итерационная процедура (8.17) получения решения реализуется в виде
![]() (8.25)
(8.25)
Здесь токи j(K) в узлах уточняют на каждой итерации через напряжения предыдущей итерации U(K) по формуле (8.24). Далее по выражению (8.25) вычисляют новые приближения напряжений U(K+1) . Такой процесс продолжается до выполнения критерия (8.19).
Необходимо отметить, что матрица Zy, в отличие от матрицы Y, является заполненной, т. е. не содержит нулевых элементов и поэтому требует значительно большей, чем для матрицы Y, оперативной памяти ЭВМ для хранения ее элементов. Обращение матрицы Y осуществляется численными методами, что по своей трудоемкости эквивалентно решению систем линейных уравнений.
Метод Z-матрицы может оказаться эффективным в расчетах режимов ЭС с неизменными или малоизменяющимися конфигурацией и параметрами сети и при изменении нагрузок в узлах. В этом случае, обратив один раз матрицу Y, напряжения в узлах определяют через неизменную матрицу Z и изменяющийся в соответствии с изменением нагрузок узлов вектор правых частей УУН.
Метод Зейделя (Гаусса-Зейделя). Метод Зейделя был первым методом, примененным для расчета установившихся режимов ЭЭС на ЭВМ. Простота алгоритмической реализации, малый объем вычислений на каждом шаге, незначительная потребность оперативной памяти и приемлемая для широкого круга задач сходимость метода позволили даже на первых моделях ЭВМ рассчитывать режимы сетей, содержащих сотни узлов [46, 55, 56].
Для получения рекуррентной формулы метода необходимо непосредственно (напрямую) выразить каждое напряжение, стоящее при собственной проводимости, через другие напряжения соответствующего уравнения системы (8.1), привести уравнения к виду, удобному для итераций (нормальному виду):
 (8.26)
(8.26)
Из формулы видно, что вместо простейшего итерационного процесса (метода Якоби), метод Зейделя использует для вычисления каждой последующей переменной самые последние (новые) значения предыдущих переменных, т. е. для вычисления текущей i-й переменной берутся значения всех предыдущих (j < i), полученных на данной (к+1) итераций, а остальные переменные Q > i) — на предыдущей (к-й) итерации. Отметим, что такая процедура вычислений значительно эффективней по сходимости, чем простая итерация.
При переходе от комплексных уравнений к действительным, выполнив в (8.26) подстановку (8.5) и выделив действительные и мнимые части, получим следующие расчетные формулы метода:
где![]()
![]()
Как правило, для решения УУН применяется «ускоренный» метод Зейделя (метод релаксации). Ускорение сходимости достигается вводом в итерационную процедуру ускоряющего коэффициента (αy).
Определив обычным способом (8.27) на каждой итерации новое значение переменной Uj(k+1), вычисляется улучшенное значение Uiy(k+1) переменной:
![]() (8.28)
(8.28)
принимаемой в качестве исходного приближения в следующей итерации.
Итерационный процесс (8.28) реализуется отдельно для продольной и поперечных составляющих напряжения:
![]() (8.29)
(8.29)
Скорость сходимости зависит от выбранной величины αy, принимаемой в интервале 0<αу<2. Основная трудность состоит в подборе коэффициента αу, определяемого пробными расчетами. Значение αу, обеспечивающее минимальное число итераций, обычно составляет 1,2...... 1,4 [46].
Огромный опыт применения программ, основанных на методе Зейделя, показывает, что для большинства схем и нормальных эксплуатационных режимов, обеспечивается получение решения за приемлемое время. Поэтому соответствующие ПВК до сих пор применяются в службах режимов и диспетчерских управлениях электросетевых предприятий и энергосистем.
Несмотря на значительное улучшение сходимости с помощью описанного приема в ряде случаев (например, при расчете режимов сетей с повышенными нагрузками) метод Зейделя может сходиться очень медленно или даже расходиться. Поэтому, до тех пор, пока недостаточная оперативная память к быстродействие ЭВМ сдерживали применение более эффективных методов, метод Зейделя был практически основным, реализованным в промышленных программах расчета установившихся режимов ЭС.
Заметим, что нелинейность, присущая УНН баланса мощностей (8.7), (8.9), не позволяет найти решение методами нулевого порядка. Весте с тем, значительный рост возможностей ЭВМ как по быстродействию, так и оперативной памяти, повышенные требования к программам по скорости и надежности получения решения во многом стимулировали развитие и практическое применение более сложных и вместе с тем более эффективных алгоритмов, в частности, базирующихся на использовании методов первого и второго порядка. В практических алгоритмах расчета установившихся режимов ЭС используют большой класс ньютоновских и градиентных методов.
Метод Ньютона (Ньотона-Рафсона) первого порядка [44, 46, 57] является более распространенным методом решения систем нелинейных уравнений. Основное преимущество метода Ньютона выражается в быстрой и устойчивой сходимости.
Идея метода Ньютона состоит в последовательной замене на каждой итерации нелинейной системы уравнений некоторой линейной, решение которой дает значение неизвестных, более близких к решению нелинейной системы, чем исходное приближение [44, 56]. Для линейной аппроксимации УУН наряду с нулевыми элементами разложения Тейлора используются элементы первого порядка, т. е. имеем
 (8.30)
(8.30)
что позволяет перейти к системе линеаризованных уравнений, например, на k-ой итерации:
![]() (8.31)
(8.31)
При этом полагаем, что текущие (искомые) значения переменных U лежат в
достаточно малой окрестности ΔU = U — U(0) начальных (исходных) значении U(O)
Данный метод относится к методам первого порядка, поскольку в нем используются только первые производные, линейно аппроксимирующие УУН (8.16). Выражения производных δωi/δUj — элементов матриц СЛУ (матриц Якоби) — различны для полученных в разд. 8.1 форм записи УУН.
В результате решения СЛУ (8.31), выполняемого обычно методом Гаусса или Зейделя, определяют поправки ΔUj к предыдущим (начальным) значениям переменных. Решение системы (8.31) отражает внутренний итерационный процесс метода Ньютона. Через найденные поправки вычисляются на внешнем шаге данного метода новые (уточненные) значения переменных:
![]() (8.32)
(8.32)
За начальные (исходные) приближения переменных принимаются модули номинальных напряжений и нулевые значения фаз (или U' = UНОМ,U" = 0), если не известны лучшие приближения этих переменных.
В результате подстановки уточненных значении переменных и в решаемые УУН вида (8.6) — (8.9) определяются величины их небалансов. Описанная процедура повторяется до тех пор, пока не будет удовлетворен критерий (8.18), который можно реализовать в виде
![]()
(8.33)
т. е. наибольший по модулю небаланс уравнений не должен превышать заданную точность η.
Если процесс сходящийся, то решение с начального приближения достигается, как правило, за 3—4 итерации, и практически не зависит от размера системы уравнений. Об отсутствии сходимости свидетельствует большое количество итераций (более 15—20), не приводящих к решению.
Наряду с высокой сходимостью
известна большая чувствительность
метода Ньютона к исходному приближению
переменных. Область, в пределах которой
заданные исходные значения сходятся к
решению, называется областью сходимости.
Обычно
это малая окрестность (Uk
–U0
) точки U
, для которой якобиан
![]() отличен от нуля и обеспечивается высокая
сходимость метода. Плохое исходное
приближение переменных, т. е. взятое вне
области притяжения переменных к
решению, может привести к расходящемуся
итерационному процессу. Алгоритм
достаточно громоздок и, имея большую
промежуточную информацию, требует
значительного объема оперативной памяти
ЭВМ.
отличен от нуля и обеспечивается высокая
сходимость метода. Плохое исходное
приближение переменных, т. е. взятое вне
области притяжения переменных к
решению, может привести к расходящемуся
итерационному процессу. Алгоритм
достаточно громоздок и, имея большую
промежуточную информацию, требует
значительного объема оперативной памяти
ЭВМ.
Как видно из приведенного описания этапов алгоритма Ньютона, основной его операцией является решение СЛУ (8.31). Эффективность этой процедуры во многом определяет эффективность метода в целом.
Существует большое количество реализаций метода Ньютона и его модификаций, образующих класс ньютоновских методов. Большинство программно-вычислительных комплексов (ПВК) расчета и анализа установившихся режимов ЭЭС и систем передачи электроэнергии, разработанных в последние годы, базируются на методе Ньютона.
Метод Ньютона второго порядка [53]. Учет нелинейности при моделировании УУН осуществляется через квадратичные члены (слагаемые со вторыми производными) разложения Тейлора (8.22) в виде
![]() (8.34)
(8.34)
Более полный квадратичный учет нелинейности по сравнению с линейным в методе Ньютона способствует значительно лучшей сходимости и уменьшению времени решения уравнений. Поясним это графически (рис. 8.1) на примере нелинейного уравнения с одной неизвестной ω(U).
По методу Ньютона (метод касательных), заменив в начальной точке U(0) нелинейное уравнение ω(U) касательной 1 (линейная аппроксимация) и решением линейного уравнения
![]()
находится приращение ΔU,
и значение переменной
![]() .
По методу Ньютона второго порядка
нелинейное уравнение заменяется кривой
второго порядка 2 (квадратичная
аппроксимация) и решением квадратичного
уравнения
.
По методу Ньютона второго порядка
нелинейное уравнение заменяется кривой
второго порядка 2 (квадратичная
аппроксимация) и решением квадратичного
уравнения
![]() (8.34 а)
(8.34 а)
вычисляется приращение
ΔU2,
дающее новое значение переменной
![]() ,
которое значительно ближе к точному
решению (корню) U
по сравнению с приближением
,
которое значительно ближе к точному
решению (корню) U
по сравнению с приближением
![]() ,
полученным методом Ньютона.
,
полученным методом Ньютона.
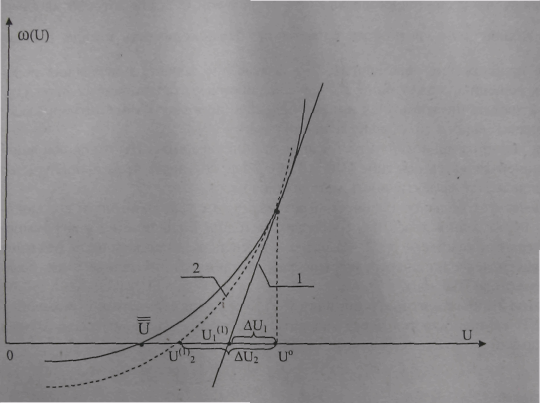
Рис. 8.1. Линейная (1) и квадратичная (2) аппроксимации нелинейного уравнения ω(U) в точке U(0).
Приращение ΔU2, определяемое из решения квадратичного уравнения (8.34 а), назовем приращением второго порядка. Использование его в рекуррентном выражении итерационного процесса при определенных условиях обеспечивает более быструю и надежную сходимость.
Возвращаемся к общему (многомерному) случаю. Основная трудность метода второго порядка заключается в решении системы (8.22) квадратичных уравнений (СКУ)
![]() (8.35)
(8.35)
на каждом шаге вместо СЛУ (8.31)
![]() (8.36)
(8.36)
в методе Ньютона первого порядка.
Существуют различные пути алгоритмической реализации метода второго порядка в зависимости от способа получения приращения ΔU из СКУ (8.35). В связи с тем, что применение прямых методов для этой цели невозможно, учет нелинейности УУН посредством квадратичного разложения осуществляется косвенно и связан с дополнительным решением СЛУ в новом итерационном процессе.
Обозначим ΔU, как вектор приращения первого порядка, полученный методом Ньютона при решении СЛУ (8.36). Используя ΔU1, результирующее приращение второго порядка можно определить из решения вспомогательной СЛУ
![]() (8.37)
(8.37)
где D — вектор квадратичных добавок в отрезке ряда Тейлора (8.22).
Таким образом, одна внешняя итерация решения УУН заключается в последовательном решении СЛУ (8.36) и (8.37).
Применительно к уравнению ω(U) = О с одной неизвестной СЛУ (8.37) можно записать
![]()
отсюда приращение второго порядка
![]() (8.38)
(8.38)
с учетом того, что в
методе касательных приращение
первого порядка
![]() ,
в итоге получим
,
в итоге получим
![]() (8.39)
(8.39)
Другой способ построения итерационной процедуры второго порядка заключается в том [53], что для решения СКУ (8.35) выполняют два шага по методу Ньютона Во-первых, как и в предыдущем случае, определяются поправки ΔU, из решения СЛУ (8.36). Во-вторых, вычисляются невязки СКУ (8.22) в точке U(1) = U(0) + Δ ,
т. е.
 (8.39 а)
(8.39 а)
Заметим, что выражение справедливо для любого (k-го) шага метода после решения СЛУ (8.36).
После корректировки матрицы Якоби:
![]()
решается вспомогательная СЛУ:
![]() (8.40)
(8.40)
относительно δU и находится результирующее приращение
![]() (8.41)
(8.41)
Для сравнения с предыдущими способами перепишем СЛУ (8.40) в виде
![]() (8.42)
(8.42)
Для решения уравнения с одной переменной ω(U) = 0 с учетом ΔU1 =-ω(U)/ω’(U) и (8.42) результирующее приращение второго порядка определяют по формуле
![]() (8.43)
(8.43)
Отметим, что, хотя объем вычислений по сравнению с методом Ньютона удваивается, общее время решения благодаря резкому улучшению сходимости уменьшается существенно (в отдельных случаях до 3-5 раз [53]) при близком расходовании памяти ЭВМ. Дополнительный объем вычисления определяется решением СЛУ (8.37) и до-расчетом вторых производных в едином цикле формирования матриц Якоби и Гессе. Заметим, что квадратичная аппроксимация достаточно точно отражает режим ЭС, а эффективность метода в значительной мере зависит от формы записи УУН. Так, уравнения баланса мощности в своем изначальном виде являются квадратичными и полно (без остальных членов) описываются анализируемым отрезком разложения ряда Тейлора (8.22), а потому решения такого уравнения можно получить за одну итерацию. В итоге отметим, что в методе Ньютона второго порядка число внешних итераций
![]() (8.44)
(8.44)
существенно меньше, чем в методе Ньютона. Эффективность метода по времени решения задачи на ЭВМ немаловажна в АСДУ, в проектных и исследовательских задачах, особенно при анализе сильно загруженных ЭС, и возрастает с увеличением размерности задачи, т. е. при расчетах режимов больших и сверхбольших ЭЭС(1—3 тыс. узлов).
8.3. РЕШЕНИЕ УРАВНЕНИЙ УЗЛОВЫХ НАПРЯЖЕНИЙ МЕТОДОМ НЬЮТОНА
Алгоритмы большинства современных ПВК расчета и анализа установившихся режимов ЭС и систем передачи электроэнергии базируются на методах первого порядка и их сочетаниях, в первую очередь, на методе Ньютона. Основное достоинство метода, при сравнительно несложной вычислительной схеме заключается в быстрой и устойчивой сходимости, что позволяет надежно определить параметры нормальных эксплуатационных, а также тяжелых и близких к предельным электрических режимов.
Наиболее распространенными в алгоритмах, реализующих метод Ньютона, являются уравнения в форме баланса мощностей. Причина тому, как отмечено в разд. 8.1, — удобство учета напряжений опорных генераторных узлов типа P,U = const. Свойства и анализ линеаризованных уравнений (8.31) для каждой из форм УУН даны в [44, 46].
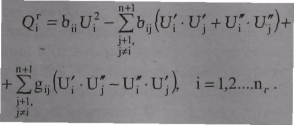
Рассмотрим решение УУН в форме баланса мощности в прямоугольной системе координат (8.7), которые с учетом уравнений (8.13) для nг генераторных
узлов, имеющих регулирование напряжений (узлы типа PU), в итоге запишем в виде:

(8.45 а)
(8.45 б)
(8.45в)
Основу алгоритмов ряда программных комплексов представляет, как правило, полный метод Ньютона, в соответствии с которым решение систем нелинейных уравнений (8.45) заменяется решением последовательности систем линейных уравнений (СЛУ) (8.31).
При данном выборе переменных U',U" получим следующие 2n-мерное
представление СЛУ (8,36):
 (8.46)
(8.46)
где
![]()
— квадратные матрицы-блоки размера n производных небалансов активной и реактивной мощностей по действительным и мнимым составляющим напряжений узлов; WP,WQ — вектор-функций небалансов активных и реактивных мощностей в узлах, вычисляемых по формулам (8.7); ΔU’, ΔU” — векторы поправок искомых переменных U',U".
Для получения матрицы Якоби
системы (8.46) необходимо выражения
четырех собственных![]()
и четырех взаимных элементов
![]()
Производные вычисляются следующим образом: собственные (диагональные) элементы
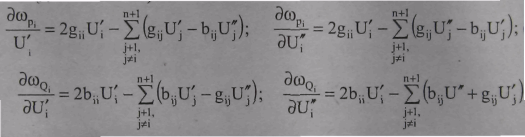 (8.47)
(8.47)
взаимные (недиагональные) элементы:
 (8.48)
(8.48)
Недиагональные элементы матрицы Якоби нулевые, если узел j непосредственно не связан с узлом i. Для схем реальных ЭЭС размером в несколько сотен узлов n количество ненулевых элементов в матрице Якоби значительно меньше нулевых. Такие матрицы большого размера (2nх2n) характеризуются как слабо-заполненные или разреженные. Заполненность матриц СЛУ аналогично матрице Y для таких схем составляет несколько процентов.
В общем случае, если схема
ЭЭС содержит nг
опорных генераторных узлов типа Рi,Ui—
const,
то в матрице Якоби диагональные элементы
производных реактивных небалансов
![]() заменяются производными уравнений
(8.45 б) вида
заменяются производными уравнений
(8.45 б) вида
![]() (8.49)
(8.49)
Число уравнений узловых напряжений (8.45) в этом случае также остается равным 2n.
Решение СЛУ (8.46) выполняется преимущественно методом упорядоченного исключения переменных по Гауссу, например, с разделением (триангуляцией) матрицы коэффициентов на верхнюю и нижнюю треугольную части, или с использованием элиминативной формы неявного представления обратной матрицы коэффициентов и минимизацией общего количества ненулевых элементов [50, 57—59], что может дать значительную экономию как в количестве вычислений, так и в объеме памяти, и, в итоге, увеличить скорость и точность решения СЛУ. Отмеченная операция (8.46) выполняется неоднократно, а поэтому эффективность решения СЛУ во многом определяет эффективность алгоритма Ньютона в целом.
Определение поправок переменных ΔU',ΔU" из линеаризованных уравнений (8.46) соответствует внутреннему итерационному процессу метода Ньютона. Уточнение значений переменных выполняется на внешнем k-м шаге метода в соответствии с выражениями:
![]() (8.50)
(8.50)
При таком выборе переменных
для узлов типа Рi,Ui;
— const
неизвестные значения
![]() вычисляются в процессе расчета по
формуле
вычисляются в процессе расчета по
формуле
 (8.51)
(8.51)
Модуль напряжения Ui
в опорных узлах поддерживается неизменным,
если расчетные значения реактивной
мощности источника Qi
находятся в допустимых пределах (8.12).
Другими словами, напряжение может
поддерживаться неизменным только
при наличии достаточного резерва
реактивной мощности в узле. Если
полученное значение
таково, что нарушаются указанные
ограничения, то расчетная величина
заменяется нарушенным
предельным значением
![]() ,
или
,
или
![]() .
Данный генераторный узел становится
неопорным (
.
Данный генераторный узел становится
неопорным (![]() — const),
а его напряжение как зависимая величина
определяется из решения СЛУ (8.46).
Выполняется смена состава зависимых
и независимых переменных генераторных
узлов
(смена базиса). Определяются по (8.50) новые
значения переменных, в том числе
напряжение неопорного генераторногоузла,
т. е.
— const),
а его напряжение как зависимая величина
определяется из решения СЛУ (8.46).
Выполняется смена состава зависимых
и независимых переменных генераторных
узлов
(смена базиса). Определяются по (8.50) новые
значения переменных, в том числе
напряжение неопорного генераторногоузла,
т. е.
![]()
После того, как на k-й итерации получены значения неизвестных U'(k), U"(k) и соответствующие им невязки уравнений (8.45), расчет напряжений заканчивается, если погрешность балансирования уравнений не более допустимой величины η:
![]() (8.52)
(8.52)
Величина допустимой невязки УУН зависит от назначения расчета, класса номинального напряжения рассчитываемой сети и других факторов. Так, при расчете режимов местных и районных ЭС значения т) следует принять в пределах 0,1—0.5МВ*А.
В итоге отметим, что итерационный процесс вычисления напряжений методом Ньютона осуществляется в соответствии со следующей схемой:
а) определение расчетных мощностей узлов и небалансов уравнений (8.45);
б) вычисление элементов, формирование матрицы Якоби (8.47) — (8.49) и решение линеаризованных уравнений (8.46);
в) уточнение искомых напряжений в узлах по (8.50);
г) контроль точности решения в соответствии с (8.52) и так далее до сходимости итерационного процесса или фиксации его расходимости.
8.4. РАСЧЕТ ПАРАМЕТРОВ УСТАНОВИВШЕГОСЯ ЭЛЕКТРИЧЕСКОГО РЕЖИМА
После решения уравнений установившегося режима и получения напряжений в узлах ЭС выполняется второй этап задачи — расчет потокораспределения: мощностей и токов в схеме, потерь мощности в ветвях, мощности балансирующего источника и другие; определяются суммарные параметры электрического режима: зарядная мощность линий, потери мощности в линиях, трансформаторах и шунтах сети, потребление и генерация во всей ЭС [50].
Электрический режим ЭС
однозначно определяется значениями
напряжений в узлах Ui
=![]() i
= l,2,..n.
В практических целях напряжения в узлах
i
= l,2,..n.
В практических целях напряжения в узлах
обычно представляют в виде модулей
![]() (8.53)
(8.53)
и фаз напряжений
![]() (8.54)
(8.54)
Другие параметры режима вычисляются на основе классических соотношений теории электрических цепей через найденные значения напряжений и заданные параметры схемы замещения. При этом, в отличие от решения УУН, оперируют с комплексными переменными и параметрами ЭС. Получение вещественных и мнимых составляющих комплексной величины или ее абсолютного значения осуществляется встроенными средствами алгоритмических языков.
Параметры режима определяются в цикле обхода схемы ЭС по узлам. При этом каждая ветвь ij схемы (кроме поперечных) просматривается с двух сторон: со стороны узла i и узлаj. Одновременно накапливаются суммарные параметры режима. Вычисление параметров проиллюстрируем на фрагменте схемы сети (рис. 8.2), содержащей продольные и поперечные элементы.
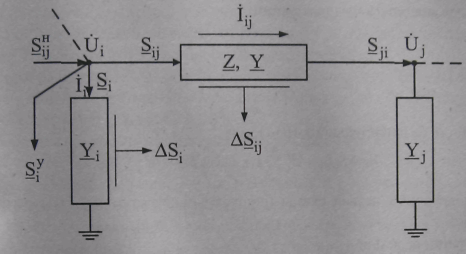
Рис. 8.2. Фрагмент схемы сети
Для продольной ветви ij (сопротивления линий, трансформаторов и др.) со стороны узла i имеем: — ток в базе ветви
![]() (8.55)
(8.55)
Мощность в начале ветви (например, выходящий из узла i поток):
![]() (8.56)
(8.56)
В этой же ветви поток со стороныузла j (конец ветви ij)
![]()
(8.57)
с противоположным потоку Sy знаком (входящий в узел j) поток и отличающийся
на величину потерь мощности
![]() (8.58)
(8.58)
Или непосредственно по закону Джоуля-Ленца:
![]() (8.59)
(8.59)
В последних выражениях для потерь мощности учтено, что произведение комплексно-сопряженных чисел равно квадрату их модуля. Потери мощности для всей сети
![]() (8.60)
(8.60)
Зарядная мощность в начале линии
![]() (8.61)
(8.61)
и во всей сети
![]() (8.62)
(8.62)
Мощность балансирующего (n+1) узла
![]() (8.63)
(8.63)
Для поперечных ветвей схемы (шунтирующие реакторы, узлы нагрузок и др.) отметим: фазный ток ветви на землю
![]() (8.64)
(8.64)
фазный ток шунта при известной нагрузке
![]() (8.65)
(8.65)
мощность трех фаз (потери) шунта
![]() (8.66)
(8.66)
и во всех шунтах сети
![]() (8.67)
(8.67)
Поток в начале ветви с учетом мощности шунта
![]() (8.68)
(8.68)
Если к узлу i примыкает j продольных ветвей, расчетная нагрузка узла
![]() (8.69)
(8.69)
Тогда с учетом заданной
нагрузки в узле
![]() небалансы (невязка) мощностей узла
небалансы (невязка) мощностей узла
(8.11, б)![]()
строго и естественно характеризуют точность решения (балансирования) уравнений установившегося режима.
8.5. АЛГОРИТМ ПРОГРАММЫ РАСЧЕТА УСТАНОВИВШИХСЯ РЕЖИМОВ ЭС
В предыдущих разделах дана характеристика математического описания и основных этапов задачи расчета параметров установившихся режимов ЭС, имеющей самые разнообразные программные реализации.
Ниже рассматривается пример такой реализации, отражающей суть данной задачи в целом, в виде блок-схемы алгоритма программы REGIM [50], нашедшей широкое применение в учебной практике.
Алгоритм расчета параметров установившегося режима ЭС поясняется укрупненной блок-схемой, представленной на рис. 8.3, и состоит из трех основных частей:
1) ввод, обработка, вывод исходных данных и формирование уравнений установившегося режима охватывается блоками 1—4;
2) решение уравнений, описывающий режим и непосредственный расчет параметров установившегося состояния ЭС характеризуется блоками 5—15;
3) вывод параметров электрического режима, переход к новой схеме или завершение расчетов отражены в блоках 16—25.
Суть алгоритма программы заключается в следующем:
1. Ввод исходных данных. Считываются данные о параметрах ЭС и программных константах, подготовленные заранее на магнитном диске или вводимых с экрана ЭВМ.
2. Обработка данных. Осуществляется сортировка данных по их виду. Подсчитывается количество узлов, ветвей, выделяются опорные генераторные узлы, балансирующий узел, ветви линий, трансформаторов, реакторов. Выполняется расчет проводимостей ветвей и узлов, формирование матриц проводимостей в виде связных списков, перенумерация узлов ЭС и определяются ранги исходной схемы, что позволяет упростить подготовку исходной информации за счет возможности ее произвольного ввода. Перенумерация узлов осуществляется внутри алгоритма, а все внешние ссылки и сообщения поступают в заданной (исходной) нумерации.
При этом производится контроль связности графа схемы. В итоге формируются уравнения узловых напряжений вида (8.45).
3. Определение необходимости просмотра и корректировки данных.
4. Просмотр и корректировка программных (управляющих) констант и параметров ЭС, сгруппированных в табличном виде. Есть возможность дополнения
и удаления узлов и ветвей схемы. При этом вес изменения данных осуществляются в оперативной памяти, оставляя без изменения исходный файл.
5. Вычисление небалансов (невязок) уравнений по формулам (8.45).
6. Контроль точности решения (балансирования) уравнений установившегося режима по критерию (8.52). При выполнении последнего решение уравнений заканчивается и осуществляется переход к блоку 15. В противном случае, т. е. если хотя бы одно из уравнений имеет недопустимый небаланс, выполняется следующая итерация решения УУН.
7. Счетчик числа внешних итераций, выполняемых по выражениям (8.50). Номер текущей k-й итерации увеличивается на единицу.
8. Контроль сходимости решения УУН. Если номер текущей k-й итерации, не превышает ее предельного значения kДОП (задаваемый параметр), то продолжается процесс решения УУН, т. е. выполняется переход к формированию линеаризованных уравнений (8.46). При отсутствии сходимости за допустимое число итераций (k>kДОП) процесс решения УУН прерывается. Появляется перечень узлов, информацию о которых следует проверить и внести изменения в данные этих узлов или примыкающих к ним ветвей.
9. Вычисление по выражениям (8.47) - (8.49) элементов матрицы Якоби и формирование системы линеаризованных уравнений (8.46).
10. Решение методом Гаусса систем линеаризованных уравнений (8.46).
11. Уточнение по формулам (8.50) напряжений на очередном внешнем (k+1) шаге метода Ньютона.
12. Вычисление реактивной мощности (8.51) опорных и неопорных генераторных узлов.
13. Определение необходимости смены базиса. Устанавливается в результате появления опорных генераторных узлов, изменивших свой тип ввиду нарушения ограничений по реактивной мощности (8.12), и выявления неопорных генераторных узлов, расчетная реактивная мощность которых (8.51) возвращается в указанные пределы.
14. Смена состава (списка) опорных и неопорных генераторных узлов (смена базиса).
15. Вычисление параметров электрического режима по формулам (8.53) — (8.68).
16. Определение необходимости вывода параметров режима в табличном или графическом видах.
17. Подготовка параметров режима к выводу в табличном виде (в полной или укороченной формах). Группировка параметров по узлам и ветвям, по классам напряжения и районам.
18. Вывод параметров режима на бумагу.

Рис. 8.3. Блок-схема программного комплекса
19 Вывод параметров режима на экран.
20. Запись параметров режима на магнитный диск.
21 Вывод параметров режима в графическом виде.
22 Определение необходимости вывода графического изображения результатов на печать.
23. Вывод графического представления режима на бумагу.
24. Контроль необходимости корректировки схемы.
25. Определение необходимости перехода к расчету режима новой схемы. Отметим, что после каждого этапа можно выбрать направление работы программного комплекса, управляя траекторией решения задачи.