

Двигатель постоянного тока как элемент автоматики. Принципиальная схема, основные уравнения движения
Принципиальная схема включения ДПТ
БП
— блок питания, вырабатывающий постоянное
напряжение; Я — якорь ДПТ; ОВ — обмотка
независимого возбуждения; U,
В - постоянное напряжение на выходного
блока питания;![]() ,
рад/с — угловая скорость вращения якоря;
М,
Н·м — момент внешней нагрузки; Мд,Н·м
— момент двигателя.
,
рад/с — угловая скорость вращения якоря;
М,
Н·м — момент внешней нагрузки; Мд,Н·м
— момент двигателя.
Когда внешний момент равен нулю, т.е. M=0. Под действием напряжения U в якоре протекает ток Iя. Ток взаимодействует с магнитным полем ОВ и вызывает возникновение вращающего момента двигателя Мд. Момент пропорционален току якоря Iя имеет направление, зависящее от полярности напряжения U. При вращении якоря в его обмотке наводится эдс самоиндукции Е, которая противоположна по направлению напряжению U
Если к якорю приложить внешний момент M, то необходимо, чтобы момент двигателя Мд был больше значения внешнего момента М в момент пуска. Чем выше скорость вращения якоря ω тем будет больше эдс Е, зависящая от частоты ω. С увеличением частоты вращения ω уменьшается ток якоря Iя, и разгон прекращается, когда момент Мд оказывается равным внешнему моменту М .
Д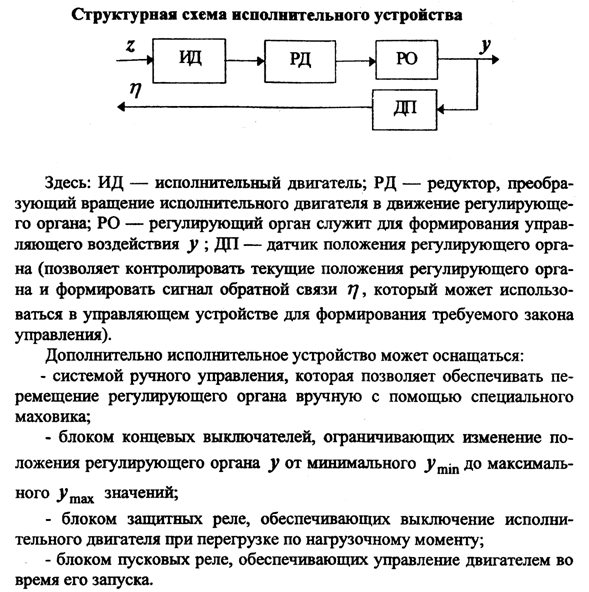 инамическое
уравнение вращения ДПТ:
инамическое
уравнение вращения ДПТ:
![]() .
.
Момент двигателя Мд пропорционален току якоря, Мд=СяIя.
Jд, кг∙м— момент инерции ДПТ; См, Н∙м/А — механическая постоянная (зависит от конструкции двигателя). Электрические процессы в якорной цепи, показанной на рис, включает активное сопротивление Rя, индуктивность Lя и эдс Е якоря.
Найдем
полное операторное сопротивление
якорной цепи zя(р)=Rя+Lяр,
где Rя,
Ом-активное сопротивление, Lя,
Гн - индуктивность якорной обмотки,
![]() -
оператор дифференцирования.
-
оператор дифференцирования.
О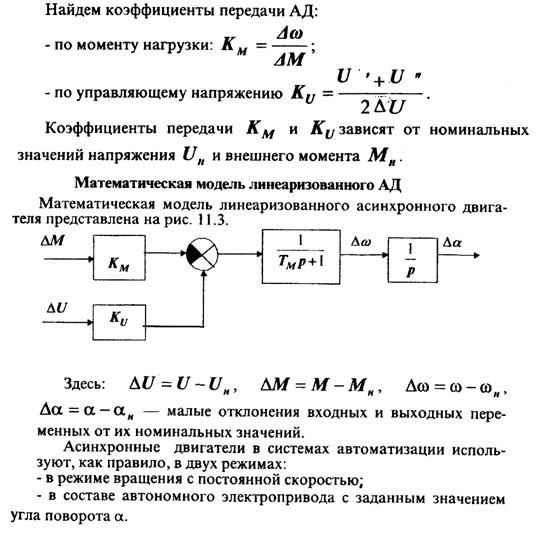 ператорное
значение тока якоря Iя(р)
определяется
выражением
ператорное
значение тока якоря Iя(р)
определяется
выражением
![]() или
или
 Обозначим:
Обозначим:
![]() — коэффициент передачи якоря;
— коэффициент передачи якоря;
![]() — электромагнитная постоянная времени
якоря. Можно записать передаточную
функцию якорной цепи
— электромагнитная постоянная времени
якоря. Можно записать передаточную
функцию якорной цепи
![]() .
.
Э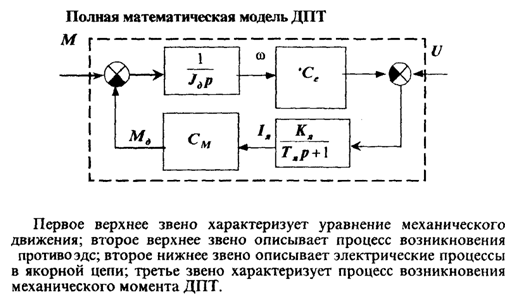 лектродвижущая
сила якорной обмотки пропорциональна
скорости вращения
ω,
т.е. E=Ceω,
Ce
—
электрическая постоянная времени ДПТ.
лектродвижущая
сила якорной обмотки пропорциональна
скорости вращения
ω,
т.е. E=Ceω,
Ce
—
электрическая постоянная времени ДПТ.
Полная математическая модель ДПТ
Первое верхнее звено - уравнение механического движения; второе верхнее - процесс возникновения противоэдс; второе нижнее - электрические процессы в якорной цепи; третье - возникновение механического момента ДПТ.
Асинхронный двигатель как элемент автоматики. Структурная схема, передаточная функция, переходные характеристики
В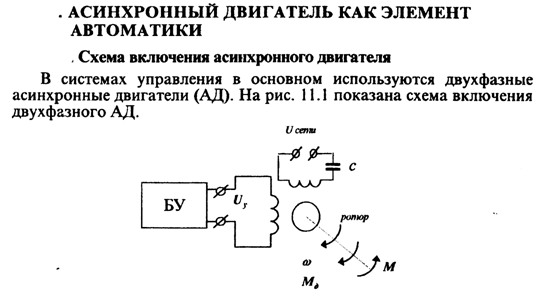 СУ в основном используются двухфазные
АД
СУ в основном используются двухфазные
АД
Линеаризация статической характеристики АД осуществляется в номинальном режиме при U=Uн и M=Mн.
α'—
угол наклона касательной к механической
характеристике АД в точке номинального
режима. Очевидно, что
![]() .
Тогда постоянная времени АД в номинальном
режиме: Т’м=Jдtgα’.
Обозначим
U’=Un+ΔU
и U'’=Un-ΔU
.
Тогда постоянная времени АД в номинальном
режиме: Т’м=Jдtgα’.
Обозначим
U’=Un+ΔU
и U'’=Un-ΔU
П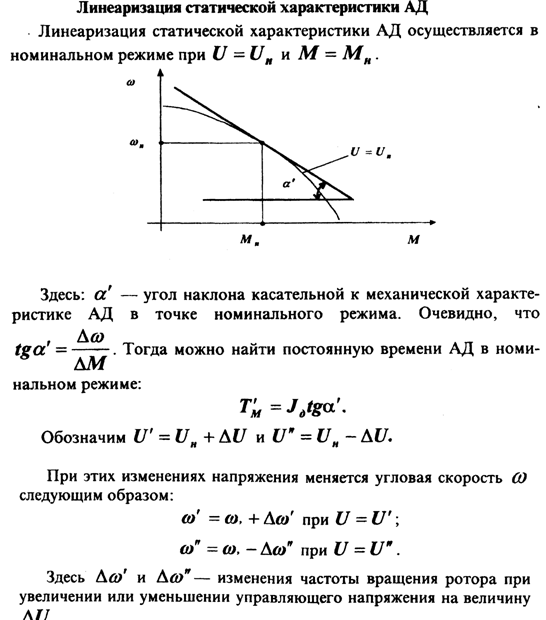 ри
этих изменениях напряжения меняется
угловая скорость ω
следующим образом:
ри
этих изменениях напряжения меняется
угловая скорость ω
следующим образом:
![]() при
при
![]() ;
;
![]() при
при
![]() .
.
![]() и
и
![]() —
изменения частоты вращения ротора при
увеличении или уменьшении управляющего
напряжения на величину ΔU
—
изменения частоты вращения ротора при
увеличении или уменьшении управляющего
напряжения на величину ΔU
Найдем
коэффициенты передачи АД: по моменту
нагрузки:
![]() ;
по
управляющему напряжению
;
по
управляющему напряжению
![]() .
Коэффициенты передачи
.
Коэффициенты передачи
![]() и
и
![]() зависят
от номинальных значений напряжения
зависят
от номинальных значений напряжения
![]() и
внешнего момента
и
внешнего момента
![]()
Математическая модель линеаризованного АД
![]() ,
,
![]() ,
,
![]() ,
,
![]() —
малые отклонения вх и вых переменных
от их номинальных значений.
—
малые отклонения вх и вых переменных
от их номинальных значений.
Асинхронные
двигатели в системах автоматизации
используют в режимах: вращения с
постоянной скоростью; в составе
автономного электропривода с заданным
значением угла поворота
![]()