

Раздел 2. Локальные системы управления
Особенности математического описания объектов управления. Входные и выходные переменные. Векторы состояния, управления и возмущения. Оператор и переходная функция
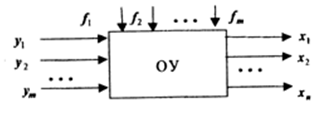
у1, у2…уm — входные управляющие воздействия, изменяться с помощью ИУ;
f1, f2…fm — возмущающие входные воздействия, не зависят от СУ;
x1, x2…xm — выходные переменные или наблюдаемые переменные состояния, рассматриваются измеряемые выходные переменные.
Когда
управляющие переменные у1,
у2…уm
принадлежат метрическому пространству
Rm,
т.е. {у1,
у2…уm}![]() Rm,
возмущающие переменные{f1,
f2…fm}
R’,
а переменные {x1,
x2…xm}
образуют
метрическое множество наблюдений Rm,
т.е. {x1,
x2…xm}
Rm.
Тогда
вх и вых переменные объекта образуют:
Rm,
возмущающие переменные{f1,
f2…fm}
R’,
а переменные {x1,
x2…xm}
образуют
метрическое множество наблюдений Rm,
т.е. {x1,
x2…xm}
Rm.
Тогда
вх и вых переменные объекта образуют:
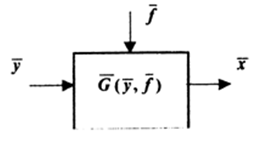
вектор управления y={у1, у2…уm}
вектор возмущения f={f1, f2…fm}
вектор выходных переменных x={x1, x2…xm}. Математическое описание устанавливает связь между выходными и входными переменными объекта.
Оператором объекта называется математическое выражение, которое описывает связь между его входными и выходными переменными.
Отсюда
следует, что в векторной форме оператор
объекта можно записать формулой
![]() .
.
В координатном виде оператор объекта имеет вид xi=Gi(у1, у2…уm; f1, f2…fm).
В зависимости от динамических свойств объекта в качестве его оператора могут использоваться дифференциальные уравнения (линейные или нелинейные), интегро-дифференциальные уравнения, а также логические и алгебраические выражения.
Для анализа свойств динамических объектов используются понятия переходной функции объекта управления.
При заданных начальных условиях и действующих вх возмущениях время t может быть дискретным или непрерывным. Для ОУ задаются допустимые множества вх и вых переменных, а также времени.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Все реальные объекты являются нелинейными, нестационарными, а также распределенными. Поскольку ОУ есть некий физический процесс, то все реальные ОУ являются нелинейными.
Д атчики систем автоматики
Датчик – технический прибор, который преобразует физический параметр x в выходной сигнал ид, который может быть использован в устройствах автоматики.
В технике различают датчики общепромышленного и специального типа.
Общепромышленные датчики - регистрация сигналов, часто встречающихся в технике (датчики температуры, давления, соотношения и т. п.).
Специализированные датчики разрабатываются для данной СУ. В полиграфии - датчики контроля приводки, оптической плотности, степени увлажнения и т.п.
Датчики систем автоматики могут отличаться от датчиков измерительных систем (чувствительный элемент должен обеспечить однозначную связь между физическими параметрами х и ид).
Датчик должен иметь низкую погрешность. Статическая характеристика измерительного датчика должна быть по возможности линейной.
В системах автоматики свойства датчиков существенно нелинейные (датчики релейного типа). Датчики систем автоматики осуществляют динамическое преобразование входного сигнала (могут интегрировать или дифференцировать входной сигнал x(t)).
П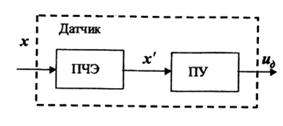 ЧЭ
— первичный чувствительный элемент;
ПУ — предварительный усилитель.
ЧЭ
— первичный чувствительный элемент;
ПУ — предварительный усилитель.
ПЧЭ является основным элементом датчика, он преобразует физическую величину х'. Обычно мощность сигнала х' очень мала и в датчике располагается предварительный усилитель.
Основные функции предварительного усилителя: усиление сигнала х' по мощности; коррекция нелинейности статической характеристики первичного чувствительного элемента; коррекция динамических свойств; фильтрация высокочастотных помех; функциональное преобразование выходного сигнала (логарифмирование).
Р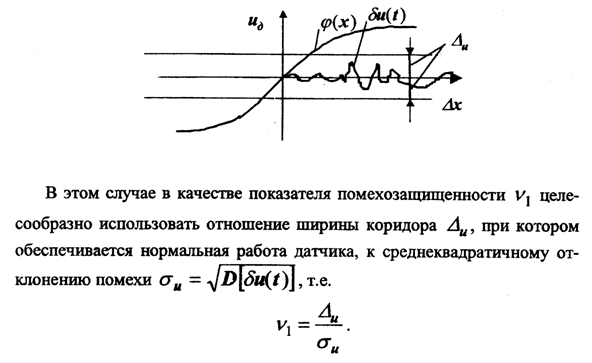 азличают
обычные датчики, в которых выходной
сигнал ид
пропорционален физическому параметру
x,
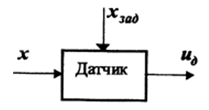
и двухтактные датчики или дифференциальные
датчики. В этих датчиках выходной сигнал
ид
пропорционален разности измеряемого
сигнала х
и его заданного значения xзад,
т.е. uд=х-хзад
азличают
обычные датчики, в которых выходной
сигнал ид
пропорционален физическому параметру
x,
и двухтактные датчики или дифференциальные
датчики. В этих датчиках выходной сигнал
ид
пропорционален разности измеряемого
сигнала х
и его заданного значения xзад,
т.е. uд=х-хзад
Классификация датчиков
П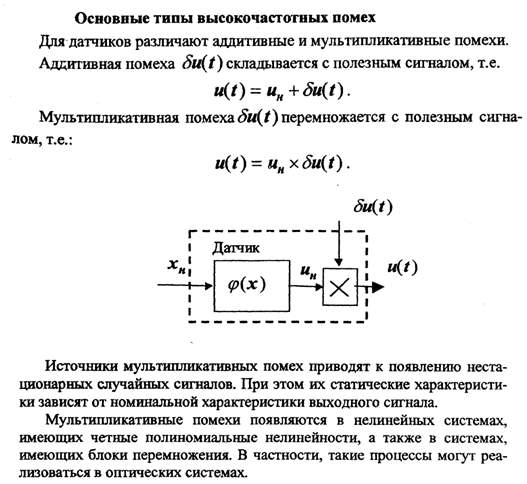
 о
наименованию физических параметров,
для измерения которого предназначен
датчик (датчик температуры, расхода,
натяжения и т. п.); По принципу, который
заложен в основу работы датчика
(мембранный датчик давления, термопарный
датчик температуры, пружинный датчик
натяжения); По физической природе вых
сигнала (пневматические, гидравлические,
электрические, электронные, световые,
оптоэлектронные датчики); По характеру
квантования входных и выходных сигналов
датчики делятся на аналоговые (с
непрерывным выходным сигналом), импульсные
(с квантованным по времени выходным
сигналом) и цифровые (с выходным сигналом,
квантованным по времени и по уровню).
Понятие «импульсный» характеризует
принцип работы датчика (импульсный
датчик приводки или увлажнения); По
свойству линейности статической
характеристики различают пропорциональные
(линейные)
и нелинейные датчики (логические
датчики); По динамическому преобразованию
входного сигнала (малоинерционные,
инерционные, интегрирующие, дифференцирующие
и т.п.); По свойствам функционального
преобразования различают: обычные и
функциональные датчики (функциональные
преобразования выходного сигнала); По
учету заданного значения измеряемой
величины - обычные и двухтактные датчики.
о
наименованию физических параметров,
для измерения которого предназначен
датчик (датчик температуры, расхода,
натяжения и т. п.); По принципу, который
заложен в основу работы датчика
(мембранный датчик давления, термопарный
датчик температуры, пружинный датчик
натяжения); По физической природе вых
сигнала (пневматические, гидравлические,
электрические, электронные, световые,
оптоэлектронные датчики); По характеру
квантования входных и выходных сигналов
датчики делятся на аналоговые (с
непрерывным выходным сигналом), импульсные
(с квантованным по времени выходным
сигналом) и цифровые (с выходным сигналом,
квантованным по времени и по уровню).
Понятие «импульсный» характеризует
принцип работы датчика (импульсный
датчик приводки или увлажнения); По
свойству линейности статической
характеристики различают пропорциональные
(линейные)
и нелинейные датчики (логические
датчики); По динамическому преобразованию
входного сигнала (малоинерционные,
инерционные, интегрирующие, дифференцирующие
и т.п.); По свойствам функционального
преобразования различают: обычные и
функциональные датчики (функциональные
преобразования выходного сигнала); По
учету заданного значения измеряемой
величины - обычные и двухтактные датчики.

Статической характеристикой датчика φ(х) называется зависимость установившихся значений выходного сигнала ид, полученная при постоянных значениях входного сигнала x, т.е. uд= φ(х).
Для датчиков указывается область, допустим режимов.
Чувствительностью
датчика S(x)
называется
первая производная от его статической
характеристики φ(х),
т.е.
![]() .
.
На линейном участке статической характеристики чувствительность S примерно постоянна: S=S0.
Чем выше чувствительность датчика, тем лучше качество его работы. Для линейных датчиков значение чувствительности S совпадает с коэффициентом передачи, т.е. S=Kд.
Значение Kд показывает, как изменяется значение выходного сигнала при изменении входного сигнала х на единицу измерения.
Для нелинейных датчиков значение чувствительности переменно. Область допустимых режимов - чувствительность датчика максимальна, т.е. S=S0 - наилучшая помехозащищенность датчика.
Инерционность
датчика оценивается по соотношению
времени установления показаний датчика
![]() и
времени установления сигналов либо в
объекте
и
времени установления сигналов либо в
объекте
![]() .
либо в других элементах СУ.
.
либо в других элементах СУ.
![]() <<
— датчик малоинерционный.
=
— датчик инерционный.
<<
— датчик малоинерционный.
=
— датчик инерционный.
>> — датчик сильно инерционный.
Динамика
датчика влияет на динамику системы. При
динамическом анализе датчиков, выделяется
инерционная часть W(p),
коэффициент передачи которой равен 1,
т.е.
![]()
Тогда динамические структуры датчика с инерционностью на входах и выходах.
Для датчиков различают два показателя мощности: мощность от источника питания Pпотр, мощность, от технологического процесса Pтп. Pпотр<< Pтп
Pпотр значительно меньше ограничивает возможность применения датчика, так как по этому показателю рассчитывается мощность блока питания.