

8.2.2. Построение переходных процессов
Переходный процесс гироскопа можно построить, подав на вход модели гироскопа ступенчатое воздействие и наблюдая реакцию с помощью блока Scope.
Для линейной системы вид переходного процесса не зависит от величины входного воздействия, т.е. изменяется пропорционально величине ступенчатого сигнала. Поэтому при анализе линейных систем переходный процесс строят при единичном входном ступенчатом воздействии 1(t).
Для нелинейных систем реакция системы зависит не только от свойств системы, но и от величины ступенчатого воздействия.
Поэтому, чтобы оценить влияние нелинейностей скоростного гироскопа на вид переходного процесса, в работе расчеты следует провести при трех разных значениях ступенчатого входного сигнала:
=
2 Umin;
=
![]() ;
=
.
;
=
.
Ступенчатое воздействие можно задать двумя способами:
с помощью блока Step (ступенька);
с помощью блока Constant (постоянное значение).
Оба этих блока можно взять из библиотеки lab_2 или из раздела Sources библиотеки блоков Simulink.
Чтобы сравнивать переходные процессы для линейной и нелинейной моделей гироскопа, целесообразно кривые процессов для этих двух моделей построить на одном графике. В Simulink две или несколько кривых можно построить на одном графике, объединив два или несколько скалярных сигналов в один векторный сигнал и подав этот векторный сигнал на вход блока Scope.
Объединение скалярных сигналов в векторный сигнал выполняется с помощью блока Mux из раздела Signal Routing (Стандартные процедуры обработки сигналов) библиотеки блоков Simulink.
Образец программы для расчета переходных процессов с использованием блока Constant приведен на рис. 13.
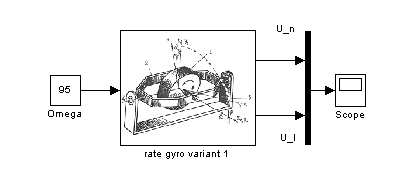
Рис. 13. Программа для расчета переходных процессов в скоростном гироскопе
Инерция скоростного гироскопа, характеризуемая его постоянной времени T, сравнительно невелика (до 0.1 сек). Поэтому для построения переходного процесса время моделирования можно задать также небольшое, примерно равное (10 - 20) Т, т.е. 1 - 2 сек. Напоминаем, что это время задается на панели инструментов программы под кнопками Simulation/Simulation Parameters/Stop Time.
Пример переходных процессов скоростного
гироскопа при линейной и нелинейной
моделях его динамики и при входном
сигнале
![]() настолько большом, что влияние
нелинейности типа насыщение сказывается
на величине выходного сигнала, приведен
на рис. 14.
настолько большом, что влияние
нелинейности типа насыщение сказывается
на величине выходного сигнала, приведен
на рис. 14.
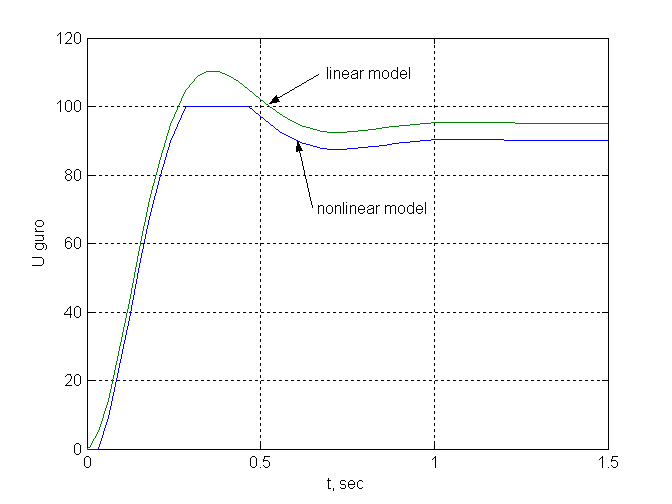
Рис. 14. Образец переходных процессов гироскопа
Используя полученные графики переходных
процессов, следует оценить постоянную
времени
![]() и коэффициент демпфирования
и коэффициент демпфирования
![]() колебательного звена, описывающего
динамику гироскопа. Кроме того, по этим
графикам можно уточнить значения
параметров
нелинейностей гироскопа, полученные
ранее с использованием статической
характеристики гироскопа.
колебательного звена, описывающего
динамику гироскопа. Кроме того, по этим
графикам можно уточнить значения
параметров
нелинейностей гироскопа, полученные
ранее с использованием статической
характеристики гироскопа.
Параметры и колебательного звена по графику переходного процесса можно оценить следующим образом.
Соотношение для переходного процесса на выходе колебательного звена может быть получено в аналитическом виде:
 . (16)
. (16)
Используя это соотношение, можно
рассчитать зависимости времени
переходного процесса
![]() и относительного перерегулирования
и относительного перерегулирования
![]() от параметров
и
от параметров
и
![]() .
.
В частности, перерегулирование
![]() и коэффициент демпфирования
связаны друг с другом зависимостью:
и коэффициент демпфирования
связаны друг с другом зависимостью:
![]() . (17)
. (17)
где:
![]() максимальное напряжение на выходе
гироскопа в переходном процессе;
максимальное напряжение на выходе
гироскопа в переходном процессе;
![]() напряжение на выходе гироскопа в
установившемся режиме.
напряжение на выходе гироскопа в
установившемся режиме.
График этой зависимости показан на рис. 15.
Время переходного процесса
при
![]() приближенно равно
приближенно равно
![]() .
.
Используя эти зависимости, можно найти
приближенные оценки параметров
![]() и
и
![]() по значениям
и
,
снятым с графика переходного процесса
на выходе линейной модели гироскопа.
по значениям
и
,
снятым с графика переходного процесса
на выходе линейной модели гироскопа.

Рис. 15. Зависимость перерегулирования от коэффициента демпфирования колебательного звена