

7. Недостатки скоростного гироскопа
В заключение следует указать на основные недостатки скоростного гироскопа. Эти недостатки связаны с инерционностью гироскопа как электро-механического устройства и наличием нелинейностей в приборе.
Инерционность гироскопа приводит к динамическому запаздыванию сигнала на выходе гироскопа по отношению к измеряемой угловой скорости. Это запаздывание особенно велико при быстрых изменениях измеряемой угловой скорости ЛА.
Сухое трение приводит к искажению выходного сигнала по сравнению с измеряемой угловой скоростью ЛА, а нелинейность типа насыщение ограничивает диапазон возможных значений измеряемой угловой скорости. Кроме того, скоростной гироскоп как гироскопический прибор имеет довольно большие габариты, массу и стоимость.
Изза указанных недостатков в последние несколько десятилетий нашли применение новые типы измерителей угловой скорости ЛА (ДУСы), такие как поплавковый гироскоп, лазерный гироскоп и другие.
8. Порядок и методика выполнения работы
8.1. Порядок выполнения работы
Лабораторная работа выполняется бригадами на компьютерах. Для упрощения формирования имитационных моделей в приложении Simulink создана дополнительная библиотека lab_2. Библиотека содержит варианты заданий (модели скоростных гироскопов с разными параметрами в виде «черных ящиков») и другие блоки, необходимые для выполнения работы. В случае необходимости студент может самостоятельно найти необходимые блоки в основных библиотеках Simulink. Бригада выполняет вариант задания, выдаваемый преподавателем. Варианты различаются исходными данными для проведения расчетов.
Все расчеты проводятся в системе программирования Matlab с использованием пакета визуального программирования Simulink.
Предполагается, что начальные навыки работы в Matlab и Simulink были получены студентами при выполнении первой лабораторной работы по данной дисциплине.
Требуется:
Рассчитать и построить статические характеристики гироскопа при линейной и нелинейной моделях гироскопа. Сравнить и объяснить полученные решения.
Рассчитать и построить переходные процессы гироскопа при линейной и нелинейной моделях гироскопа при трех значениях входного сигнала:
![]() =
2 Umin;
=
2 Umin; ![]() =
=
![]() ;
; ![]() =
=
![]() .
.
Сравнить и объяснить полученные решения.
Рассчитать и построить графики реакций гироскопа на заданный тестовый сигнал при линейной и нелинейной моделях гироскопа. Сравнить полученные решения.
Используя результаты, полученные при выполнении первых двух пунктов задания, оценить параметры модели гироскопа для выданного варианта.
Рассчитать и построить переходный процесс для модели гироскопа с оцененными параметрами, используя для этого тестовую модель rate gyro test model, находящуюся в той же библиотеке lab_2. Сравнить полученный график с переходным процессом для заданного варианта и, при необходимости, варьированием постоянной времени и коэффициента демпфирования добиться соответствия статических характеристик и переходных процессов на выходе заданной и оцененной моделей.
Оформить отчет о выполненной работе.
8.2. Методика выполнения работы
8.2.1. Расчет статической характеристики гироскопа
Предварительно должны быть выполнены следующие действия:
Запустить MATLAB.
Открыть приложение Simulink.
Открыть библиотеку lab_2.
Создать программу заданного варианта модели.
Статическая характеристика гироскопа строится путем задания на вход модели гироскопа медленно меняющегося входного воздействия, линейно возрастающего в рабочем диапазоне угловых скоростей ЛА (см. формулу (14)).
Программа моделирования приведена на рис. 10. В ней помимо блоков, реализующих модель самой системы, присутствует блок Ramp на входе и два блока XY Graph для построения графиков статической характеристики для линейной и нелинейной моделей гироскопа.
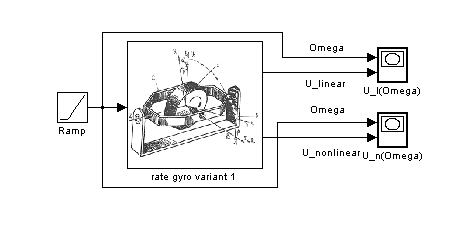
Рис. 10. Программа для расчета статических характеристик гироскопа
Блок Ramp (линейно возрастающий сигнал) берется из библиотеки lab_2 или из раздела Sources (Входы) библиотеки блоков пакета Simulink. Окно настройки данного блока показано на рис. 11.
В верхней строке данного окна задается коэффициент наклона линейной характеристики (Slope); в третьей – начальное значение сигнала на выходе блока (Initial output). Как указывалось выше, можно принять:
,
![]() сек.
сек.
При = 150 град /сек имеем =1.5.
Начальное значение выхода сигнала
блока Ramp задается равным
![]() ,
т.е. -150.
,
т.е. -150.
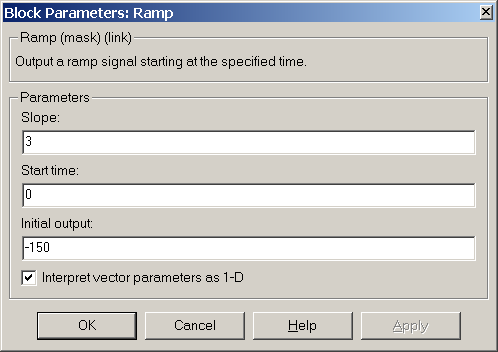
Рис. 11. Окно настройки параметров блока Ramp
Блоки XY Graph
берутся из библиотеки lab_2
или из раздела Sinks (Выходы)
библиотеки блоков Simulink.
Они служат для построения зависимости
на основе данных
и
.
В окне настройки данного блока (рис.
12) задаются минимальное и максимальное
возможные значения аргумента X
и функции Y (в данном
случае
и
).
Для
эти значения равны
![]() ,
а для
-
величины, несколько превышающие
,
например,
,
а для
-
величины, несколько превышающие
,
например,
![]() В.
В.

Рис. 12. Окно настройки параметров блока
XY Graph![]()
Требуемое время моделирования сек задается на панели инструментов программы под кнопками Simulation/Simulation Parameters/Stop Time.
Полученные графики статических характеристик для линейной и нелинейной моделей гироскопа следует перерисовать и сравнить друг с другом. Сделать выводы о влиянии нелинейностей на статическую характеристику прибора.
Используя статическую характеристику линейной модели, по формуле (15) рассчитать коэффициент усиления скоростного гироскопа:
![]() ,
(15)
,
(15)
где
![]() снимаемое с графика
выходное напряжение, соответствующее
произвольно выбранному значению угловой
скорости
снимаемое с графика
выходное напряжение, соответствующее
произвольно выбранному значению угловой
скорости
![]() .
.
Используя статическую характеристику нелинейной модели, определить числовые значения параметров для нелинейностей прибора.