

5.7. Автоматизация лесозаготовительных процессов
5.7.1. Типовые схемы лесозаготовок
Лесозаготовительные работы предназначены для …
Существуют две основные схемы лесозаготовительных работ:
скандинавская;
канадская (советская)
При первом способе
Основные стадии лесозаготовительного процесса.
Лесосечные работы
Валка
Очистка от сучьев
Трелевка
Погрузка
Нижний склад
Разгрузка
Раскряжевка
Сортировка
Штабелирование и отгрузка
Типовые схемы и основные стадии лесозаготовительного процесса (значок «+» указывает на наличие стадии)
Системы управления лесосечными работами Лесосечные работы
Технологический процесс лесозаготовительного производства
Валка
1. Назначение, устройство и выполняемые операции
Назначение. Валка – технологическая операция на лесосеке, при которой происходит спиливание или срезание ствола дерева и сталкивание его с пня на землю с помощью (рис. 1):
ручного механизированного инструмента;
различными машинами;
Рис. 1. Типы инструментов и машин для валки деревьев
Основные лесосечные работы по технологическому процессу начинаются с валки деревьев в заданном направлении. С развитием машинной валки объем заготовки древесины механизированными инструментами постепенно снижается.
2. Валочно-пакетирующая машина ЛП-19А
Валочно-пакетирующая машина(ВПМ) ЛП-19А – широкозахватная гусеничная ВПМ, предназначенная для валки деревьев и формирования их в пачки на земле. Навесное технологическое оборудование включает:
- основание
- поворотная платформа, на которой устанавливаются основные агрегаты
- манипулятор, состоящий из соединённых шарнирно стрелы и рукояти
- захватно-срезающее устройство(ЗСУ), совершающее полезную работу
- гидросистема (ГС)
- кабина оператора
Валочно-пакетирующая машина (ВПМ) ЛП-19А является сложным человеко-техническим комплексом «оператор – машина ‑ дерево» (рис. 2). Оператор принимает решения и непосредственно управляет процессами выбора спиливаемого дерева, перемещения базовой машины и технологического оборудования, а также осуществляет контроль состояния автоматизированных систем управления.
Рис 2. Схема ВПМ: 1) – захватно-срезающее устройство(ЗСУ), 2) – манипулятор; 3) – кабина оператора;
Автоматизированные системы управления включают:
управление базовой машиной (оператор задает только желаемое направление и скорость движения);
управление технологическим оборудованием;
Система управления харвестера электро-гидровлическая, т.е. привод всех систем осуществляется за счет преобразования энергии двигателя внутреннего сгорания в энергию жидкости (направленное движение гидравлического масла под давлением) под управляющим воздействием электронных систем.
Трелевка
Трелевка. Процесс перемещения заготовленной древесины (деревьев, хлыстов, сортиментов) от места заготовки к месту укладки ее в штабеля или погрузки на лесовозный транспорт (верхний склад или погрузочный пункт). Выделяю трелевку согласно рис. 1.
Рис. 1. Типы трелевки древесины
Технологическое оборудование для трелевки. По конструкции технологического оборудования для набора пачки трелевочные тракторы делятся на четыре типа:
трелевочные тракторы, оснащенные канатно-чокерным оборудованием (для трелевки деревьев и хлыстов);
трелевочные тракторы, оснащенные гидроманипулятором с клещевым захватом;
трелевочные тракторы, оснащенные пачковым клещевым захватом для трелевки сформированных пачек деревьев и хлыстов (подборщики-трелевщики пачек);
трелевочные тракторы, оснащенные гидроманипулятором с челюстным захватом трелевки (подвозки) сортиментов (погрузочно-транспортные машины).
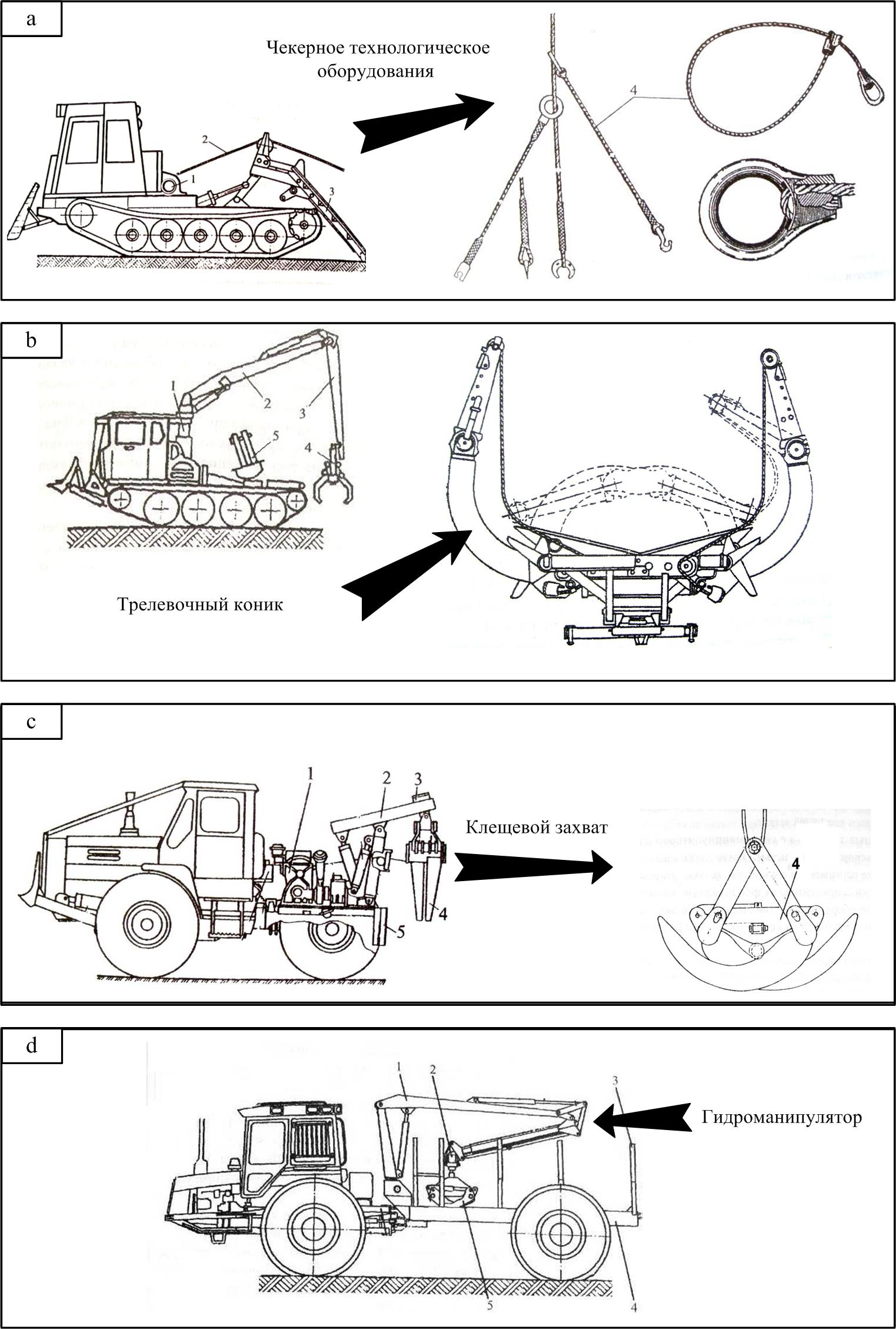
Рис. 2. Типы технологического оборудования по набору пачки: а: 1 ‑ лебёдка однобарабанная, служит для формирования пачки хлыстов, подтаскивания ее к трактору и укладки на щит; 2 ‑ собирающий канат; 3 ‑ погрузочный щит предназначен для погрузки передней части пачки на трактор, транспортирования ее в полупогруженном положении и для разгрузки пачки; 4 ‑ чокеры служат дня зацепки деревьев (хлыстов) и прицепки их к собирающему канату; b: 1- опорная ферма; 2- стрела (может поворачиваться в горизонтальной плоскости на угол до 230 градусов); 3- рукоять; 4- клещевой захват; 5- коник ( пакетоформирующее устройство с приспособлением для увязки пачки); с: 1 – лебедка; 2 ‑ стрела (арочная неповоротная с переменным вылетом); 3 ‑ механизм поворота клещевого захвата (на 210 градусов вокруг вертикальной оси); 4 ‑ клещевой захват щит; d: 1 – гидроманипулятор; 2 ‑ ротатор (механизм поворота); 3 – стойка; 4 ‑ грузовая платформа; 5 ‑ челюстной захват