

Лабораторна робота № 2 Радіолокаційні сканування профілю поверхні матеріалу
Мета: Визначити профіль поверхні матеріалу.
Теоретичні відомості
Принципово нові можливості контролю процесів, що відбуваються в металургійних агрегатах, відкриваються при скануванні радіопроменем рельєфу складної поверхні сипучого матеріалу. Наприклад, можна отримати профіль насипу шихти на колошником доменної печі.
Дослідження на натурних стендових установках показали, що для основних шихтових матеріалів доменного виробництва (коксу, агломерату, залізорудних окатишів) відбитий сигнал стійко реєструється навіть при великих кутах падіння радіохвиль, а відміну від істинного профілю визначається практично тільки розмірами шматків матеріалу.
На навчально-дослідному стенді радіолокаційного зондування можна виконувати сканування поверхні імітатора насипу матеріалів. За допомогою електроприводу РДУ може відхилятися від вертикалі на кут до 38 градусів. Тумблер «ПОВОРОТ» включення електропривода знаходиться на щиті біля робочого місця.
Хід виконання роботи
1. Проведіть 10 вимірів відстані до поверхні насипу, повертаючи радіолокатор щоразу на кут близько 4 градусів. Примітка: Для визначення кута повороту слід показання приладу помножити на 1,40.
2. Використовуючи лазерний покажчик, переконайтеся в тому, що промінь радіолокатора спрямований на поверхню насипу. Зніміть з відеокадру дані по відстані (дальності) D (м).
3. Отримані дані занесіть в таблиці 6.1 та 6.2.
Таблиця 6.1 - Дані сканування профілю поверхні
№ досліду |
Кут повороту α, град |
Відстань D, м |
1 |
4 |
|
2 |
8 |
|
3 |
12 |
|
4 |
16 |
|
5 |
20 |
|
6 |
24 |
|
7 |
28 |
|
8 |
32 |
|
9 |
36 |
|
10 |
38 |
|
4. Для того, щоб побудувати профіль засипу матеріалу, необхідно обчислити ординати Hрі і абсциси Xрі зондіруемой точок поверхні.
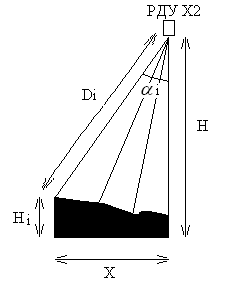
Рис 6.1 - Вимірювання відстані підчас повороту радара
На Рис 6.1 зображена схема вимірювання. Величини Хi і Hi визначте за наступними формулам і результати занесіть в таблицю 6.2.
Xрi = sin(αi) · Di ;
Hрi = H – cos(αi) · Di ,
де H - висота встановлення радара щодо статі;
αi - кут повороту радару;
Di - відстань, що вимірюється радаром.
5. Для перевірки отриманих даних побудуйте профілі поверхні за даними радіолокаційного зондування та метричних вимірювань (табл. 6.2).
Таблиця 6.2 - Побудова профілю поверхні
№ досліду |
Радіолокаційний профіль |
Метричний профіль |
||
Xрi |
Hрi |
Xмi |
Hмi |
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|
|
6. Зробіть висновки.
Контрольні питання:
1. Як впливає стан поверхні на вимірювання відстані до об'єкта?
2. Яка похибка вимірювання нерівній поверхні РДУ-Х2?
3. Як впливає пил на вимірювання радіолокатором?