

8.2 Идентификация параметров объекта по переходной функции (методика Орманса)
Для идентификации параметров двигателя постоянного тока с апериодической зависимостью скорости от времени разгона, когда ТМ>4ТЯ , часто используется переходная функция в виде:
 (8.11)
(8.11)
Здесь
 – отношение текущего значения скорости
вращения вала двигателя к установившемуся
значению;
– отношение текущего значения скорости
вращения вала двигателя к установившемуся
значению;
Т1, Т2 – постоянные времени в характеристическом уравнении, причем:
 , (8.12)
, (8.12)
где
 – коэффициент демпфирования двигателя.
– коэффициент демпфирования двигателя.
Обозначим:
 ,
тогда
,
тогда
 .
.
Отметим также, что
 ,
,
 .
.
Подставив все эти значения в (8.11), получим:
 , (8.13)
, (8.13)
где
 – относительное время.
– относительное время.
При изменении
отношения
 в широком диапазоне (от 0 до 0,25) было
установлено, что величина
в широком диапазоне (от 0 до 0,25) было
установлено, что величина
 слабо влияет на характер зависимости
(8.13), особенно в точке
слабо влияет на характер зависимости
(8.13), особенно в точке
 .
.
Время, в течении
которого достигается это значение
скорости связано с электромеханической
постоянной
 соотношением:
соотношением:
 .
.
Определив t1 экспериментальным путем, можем вычислить Тм:
 . (8.14)
. (8.14)
Если теперь задать
относительное время, например,
 ,
то получим с учетом соотношения
новое время
,
то получим с учетом соотношения
новое время
 ,
для которого также определим.
,
для которого также определим.
Подставив
 и
и
 в (8.13), решаем нелинейное уравнение
относительно
.
в (8.13), решаем нелинейное уравнение
относительно
.
После нахождения
определяемξ и далее
 .
Приближенная формула имеет вид:
.
Приближенная формула имеет вид:
 (8.15)
(8.15)
Пример. Пусть переходная характеристика имеет следующий вид (рис. 8.2).
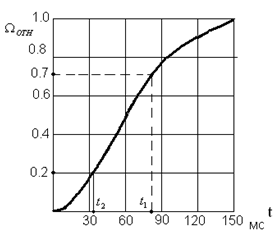
Рисунок 8.2 – Переходная характеристика процесса разгона двигателя.
Определяем
 мс.
мс.Находим
 мс.
мс.Принимаем
 и находим
и находим
 мс.
мс.Находим по графику при
 :
:
 .
.По формуле (3) вычисляем
 мс
мсПроверяем условие
 :
:

Пример 8.1. Идентифицировать параметры электромеханической системы по переходной функции
Исходные данные:
1. Структурная схема объекта представлена на рис. 1.
Рисунок 8.3 – Структурная схема объекта
2. Передаточные функции структурных блоков:


3. Значения коэффициентов и постоянных времени: К1=10; К2=0,25; К3=2.5; Т1=1с; Т2=5с.
4. Моделирование переходного процесса произвести с применением пакета MATLAB (Simulink).
Вычисление параметров переходной функции выполнить с применением пакета MathCAD.
Решение:
Определим передаточную функцию замкнутой системы:
2. Производим моделирование в среде MATLAB. Схема математической модели представлена на рис. 2.

Рисунок 8.4 – Структурная схема математической модели объекта
Параметры моделирования:
– начало моделирования – 0,0;
– конец моделирования – 16,0с;
– способ моделирования – с фиксированным шагом (Fixed-Step);
– величина шага – auto (установлена автоматически).
Для блока Step, моделирующего внешнее возмущение, устанавливаем следующие параметры:
– время наступления перепада сигнала – 10,0 (по окончании переходного процесса);
– начальное значение сигнала – 0,0;
– конечное значение
сигнала – 0,5 (принимаем возмущение на
уровне 20% управляющего воздействия ,
т.е.
 ·,
т.е. 12,50,2
= 0,5.
·,
т.е. 12,50,2
= 0,5.
Результаты математического моделирования получены с помощью команды: plot(Time,out,Time,in) и представлены на рис. 8.5.
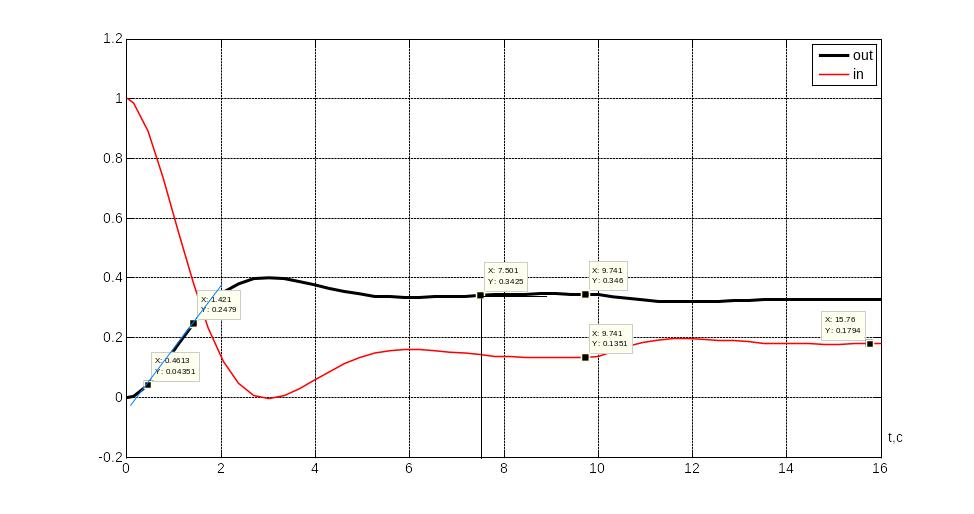
Рисунок 8.5 – График переходного процесса
Из графика видно, что:
– длительность переходного процесса составляет tпп= 7,5 с;
– установившейся уровень сигнала 0,346;
– система имеет апериодический переходной процесс, устойчива;
– установившая ошибка составляет Еуст= 0,1351.
– при возмущении ошибка увеличивается до 0,1794.
3. Постоянные времени объекта Т1 и Т2 определяем из графика переходной функции.
Так как Т2> 4Т1 и переходной процесс апериодический, то относительная величина выходного сигнала x(t)отн описывается уравнением:

где
 – относительное время;
– относительное время;
 – коэффициент, характеризующий
соотношение Т1 и Т2;
– коэффициент, характеризующий
соотношение Т1 и Т2;
 – коэффициент демпфирования системы;
– коэффициент демпфирования системы;

Используя известный
вывод, что величина
практически не влияет на
при
 ,
для которой
,
для которой
 1,2.
1,2.
Определяем значение
 при
:
при
:
 .
.
Из графика
переходного процесса (см. рис. 3) определяем
время установки значения
 ,
которое равно
,
которое равно
 .
.
Так как
 ,
постоянная времени Т2 для
составит :
,
постоянная времени Т2 для
составит :
 .
.
Задавая
другое относительное время
 находим
находим
 .
.
Из
графика переходного процесса определяется
 .
.
4. Используя среду математической прикладной программы MathCADProfessional, с помощью функции Given решаем уравнение x(t) относительно :
 с.
с.
Определим ошибку идентификации:

Определяем условие апериодического процесса

Построим математическую модель объекта с учетом полученных значений постоянных времени (см. рис. 8.6).
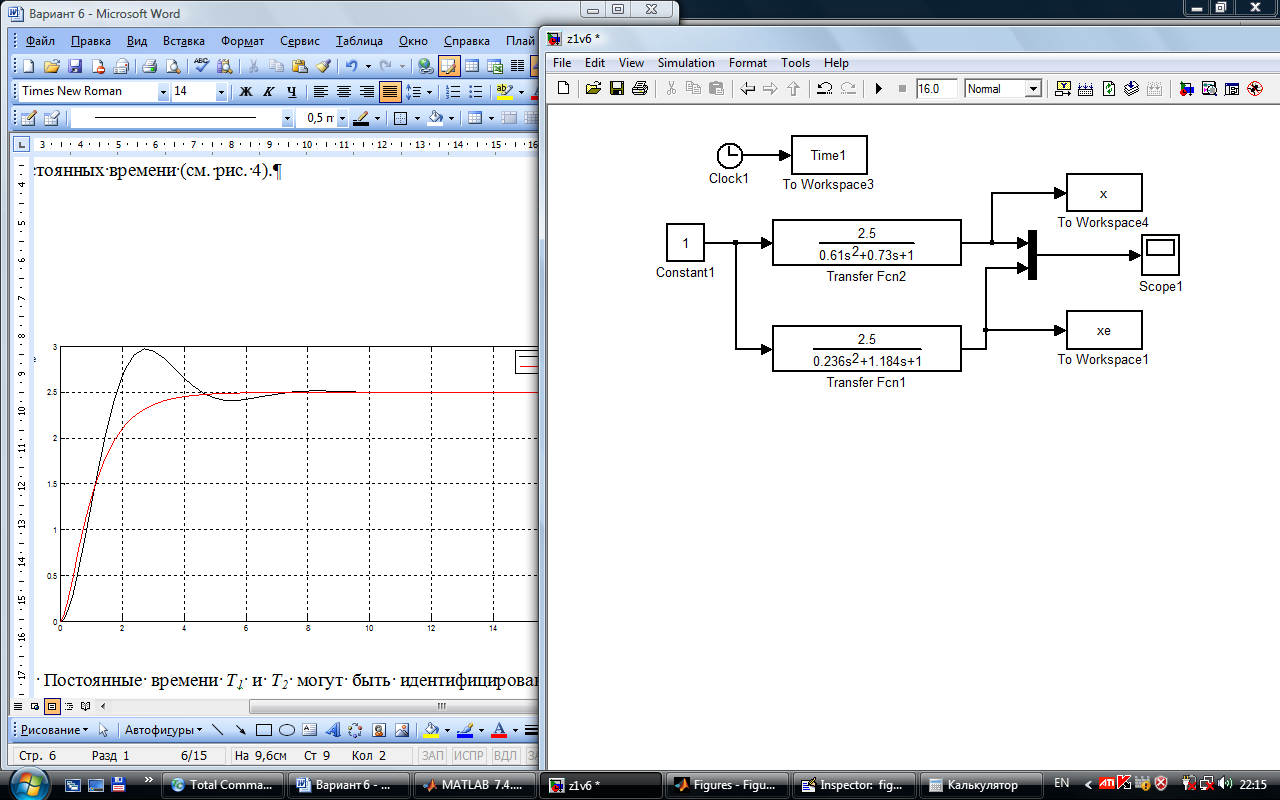
Рисунок 8.6 – Совмещенная математическая модель с заданными и идентифицированными постоянными времени
Результатом математического моделирования являются графики переходного процесса математической модели с заданными (Х) и идентифицированными параметрами (ХЕ), которые представлены на рис. 8.7.
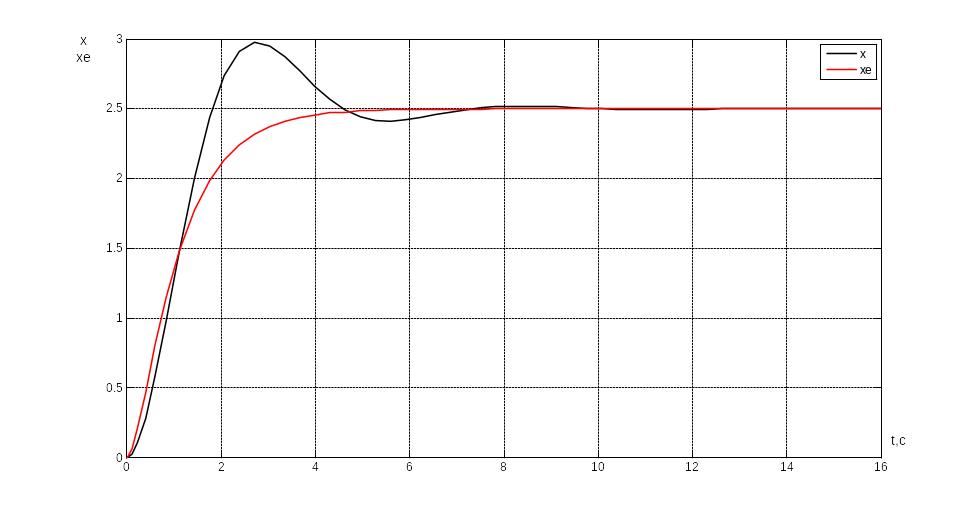
Рисунок 8.7 - Графики переходного процесса математической модели с заданными (Х) и идентифицированными параметрами (ХЕ)
Вывод: Постоянные времени Т1 и Т2 могут быть идентифицированы с достаточной точностью по графику апериодического переходного процесса (во временной области).