

1. Кинематика
1. Основные понятия
Материальная точка: тело, размерами которого можно пренебречь при описании его движения.
Система материальных точек и число степеней свободы м.т. (системы м.т.) – число независимых параметров, необходимых для фиксации ее положения в пространстве. Выбор этих параметров может быть проведен по-разному, однако их число от конкретного выбора не зависит, являясь важнейшей инвариантной характеристикой системы. Чем больше у механической системы степеней свободы, тем сложнее оказывается математический анализ закона ее движения.Материальную точку классической механики можно рассматривать как простейшие механические объекты, обладающие наименьшим числом степеней свободы. Это число совпадает с размерностью реального физического пространства, т.е. равно трем.
Абсолютно твердое тело: тело, у которого размеры и форма не меняются.
Тело отсчета: тело, относительно которого определяют положение других тел.
Система отсчета: система координат, связанная с телом отсчета и способ измерения времени (часы).
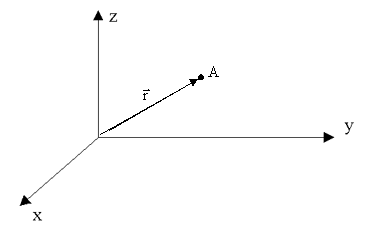
Радиус-вектор
r -
это вектор, проведенный из начала
координат в какую-либо точку пространства.
Зависимость радиуса-вектора от времени
определяет кинематический
закон движения тела
![]() .
Это векторное уравнение эквивалентно
заданию трёх скалярных уравнений
.
Это векторное уравнение эквивалентно
заданию трёх скалярных уравнений
![]() ,
,![]() ,
,![]() ,
которые также называются кинематическими
законами движения.
,
которые также называются кинематическими
законами движения.
Компоненты радиус-вектора
В трёхмерном пространстве на плоскости
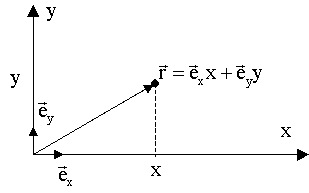
е![]() диничные
векторы или орты, направленные по осям
x, y, z соответственно;
диничные
векторы или орты, направленные по осям
x, y, z соответственно;
- x, y, z - компоненты радиуса - вектора. Очевидно, они же являются координатами материальной точки.
Модуль
радиус-вектора
![]() - по теореме Пифагора.
- по теореме Пифагора.
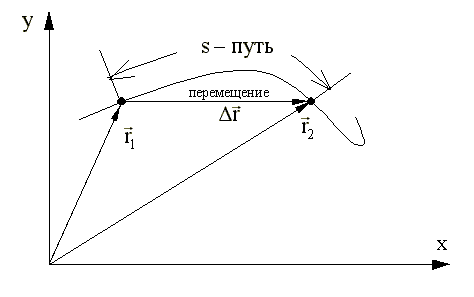
Траектория - это линия, описываемая материальной точкой при ее движении.
Путь - длина отрезка траектории.
Перемещение - вектор, проведенный из начального положения материальной точки в ее конечное положение.
Скорость - это производная радиуса - вектора по времени.

Скорость всегда направлена по касательной к траектории
Компоненты скорости
Вектор
скорости
![]() материальной
точки M, движущейся по плоскости x, y:
материальной
точки M, движущейся по плоскости x, y:
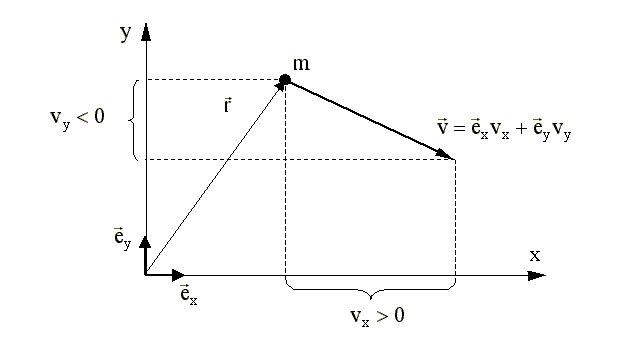
vx, vy - компоненты скорости, т.е. проекции вектора на координатные оси.
компоненты скорости равны производным соответствующих координат по времени:
![]() ;
;![]() ;
;![]() .
Зная проекции, мы всегда построим вектор
скорости.
.
Зная проекции, мы всегда построим вектор
скорости.
Средняя скорость. По теореме о среднем имеем:
Средний модуль скорости за время
t=t2-
t1
![]()
Средний вектор скорости за время
t=t2-
t1
![]()
Модуль скорости - производная пути по времени.
![]() .
.
По
теореме Пифагора: ![]() .
.
Вычисление пройденного пути: путь - это определенный интеграл от модуля скорости по времени:
![]()
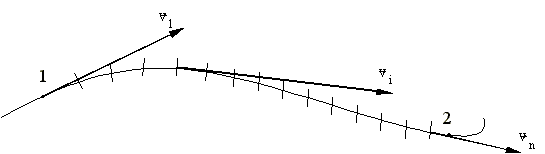
v1 в течение отрезка Δti приблизительно постоянны, если Δt достаточно мало. В пределе:
 ,
,
Ускорение - это производная скорости по времени.
 или:
или:
Ускорение - вторая производная радиуса-вектора по времени. Производную по времени от какой-либо величины называют скоростью изменения этой величины. Ускорение - это скорость изменения скорости.
Нормальное и тангенциальное ускорение
Направим
единичный вектор ![]() вдоль вектора скорости:
вдоль вектора скорости:
Тогда
![]()
(по правилу нахождения производной от произведения).
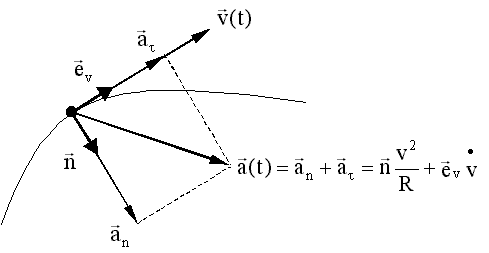
Первый член, нормальное ускорение,
показывает быстроту изменения направления скорости.
Второй, тангенциальное ускорение,
![]()
направлен вдоль скорости и показывает быстроту изменения ее модуля.
Направление и величину нормального ускорения найдем для частного случая равномерного движения материальной точки по окружности:
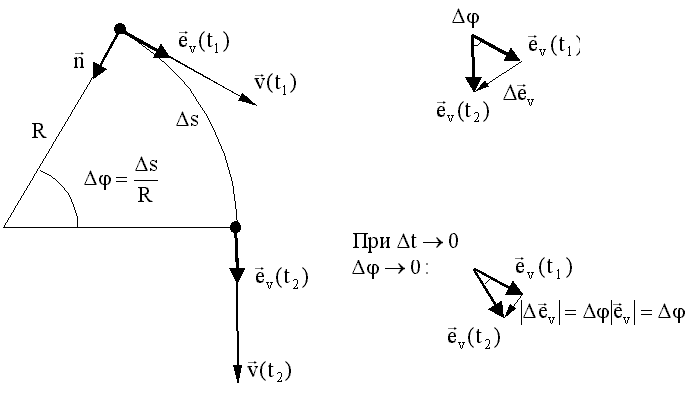
Направлен
![]() ,
при
,
при
![]() ,
по вектору
,
по вектору
![]() :
:
![]() .
.
 .
.
Нормальное ускорение направлено по нормали к скорости, его модуль:
 .
.
Для движения по произвольной кривой R - радиус кривизны траектории - не будет величиной постоянной.
.
![]() .
.
Основная
задача кинематики: по
заданной зависимости ускорения от
времени
![]() определить закон движения тела (м.т.).
определить закон движения тела (м.т.).
Для одномерного движения:
Из определения ускорения
 находится
скорость как функция времени:
находится
скорость как функция времени:
 .
(V0 –
константа интегрирования).
.
(V0 –
константа интегрирования).Из определения скорости
 находится
координата как функция времени:
находится
координата как функция времени:
 .
(x0 –
константа интегрирования).
.
(x0 –
константа интегрирования).
Таким образом, для нахождения закона движения тела по каждой координате необходимо задать шесть констант – три начальных координаты: x0, y0, z0 и три начальных проекций скорости Vx0, Vy0, Vz0 – всего 6 констант интегрирования, определяющих начальное положение тела (м.т.) – начальные условия.
Для
наиболее простого случая
![]() ,
получаем закон равнопеременного
движения:
,
получаем закон равнопеременного
движения:
![]() –
квадратичная зависимость радиуса
вектора от времени и линейная зависимость
скорости от времени
–
квадратичная зависимость радиуса
вектора от времени и линейная зависимость
скорости от времени
![]() .
.
Вопрос о зависимости ускорения от времени решается в разделе динамики материальной точки.
Для изучения механических явлений надо выбрать ту или иную систему отсчета. В различных системах отсчета законы движения имеют, вообще говоря, различный вид. Если взять произвольную систему отсчета, то может оказаться, что законы даже совсем простых явлений будут выглядеть в ней весьма сложно. Естественно, возникает задача отыскания такой системы отсчета, в которой законы механики выглядели бы наиболее просто.
Выбор системы отсчета.
Нахождение закона движения существенно осложняется, когда речь идет о взаимном расположении движущихся тел – то, с чем мы имеем дело в механике. Если мы хотим не только проследить за взаимным расположением движущихся предметов, но и установить причину их движения, а также определить закон движения, то мы должны выбирать систему отсчета вполне определенным образом. Из всех возможных систем отсчета в механике привилегированную роль играют так называемые инерциальные системы отсчета.
Инерциальную систему отсчета можно определить как систему отсчета, в которой справедливо первое Начало механики (первый закон Ньютона): всякое тело сохраняет состояние покоя или состояние равномерного прямолинейного движения пока какие-либо силы не выведут его из этого состояния. Само первое Начало можно рассматривать как утверждение того факта, что инерциальные системы существуют в природе.
Преимущество инерциальной системы отсчета впервые в истории науки обнаружилось при разрешении спора между сторонниками геоцентрической и гелиоцентрической систем мироздания. Переход от господствовавшей в средние века геоцентрической системы к гелиоцентрической означал переход от неинерциальной системы отсчета к инерциальной и дал возможность не только описывать взаимное расположение небесных тел, но и выяснить причину и законы их движения на основе открытого Ньютоном закона всемирного тяготения.
Понятие инерциальной системы -- это идеализированное понятие. Любая реально выбранная система отсчета всегда имеет какую-то "примесь" неинерциальности. Весь вопрос в том, насколько слабы эффекты, вызываемые неинерциальностью системы отсчета, и можно ли ими пренебречь при решении конкретной задачи. Так, например, система отсчета, связанная с Землей, совершенно непригодна для задач небесной механики, но полностью удовлетворяет нуждам внешней баллистики (расчет полета снарядов). Однако, при расчете движения спутников эффект неинерциальности системы земного отсчета становится уже заметным и может быть учтен как малая поправка.
Если установлено существование некоторой инерциальной системы отсчета, то любая другая система отсчета, движущаяся по отношению к первой прямолинейно с постоянной скоростью, также будет инерциальной. Действительно, совершенно очевидно, что для любой такой системы отсчета будет справедливо первое Начало механики, а это означает, по определению, ее инерциальность.
При переходе от одной инерциальной системы к другой, движущейся относительно ее, скорость материального тела изменяется на величину относительной скорости координатных систем, а ускорение остается неизменным. Вследствие этого, второй закон Ньютона, являющийся основным законом механики, имеет один и тот же вид во всех инерциальных системах отсчета.
Здесь мы подошли к формулировке одного из основных принципов механики.
Принцип относительности Галилея
Законы механики имеют одинаковый вид во всех инерциальных системах отсчета. Это же утверждение можно выразить словами: законы механики инвариантны относительно перехода от одной инерциальной системы отсчета к другой. Это ставит инерциальные системы в исключительное положение по сравнению с неинерциальными системами отсчета и обеспечивает их принципиальное преимущество при решении задач механики. Существование инерциальных систем отсчета связано со свойствами пространства и времени. По отношению к неинерциальной системе отсчета пространство является неоднородным и неизотропным. Это значит, что даже для свободного тела различные положения его в пространстве и его различные ориентации в механическом отношении неэквивалентны; то же самое относится в общем случае и ко времени, которое будет неоднородным, т.е. различные моменты времени будут неэквивалентными.
Принцип относительности Галилея утверждает, что всегда можно найти такую систему отсчета,по отношению к которой пространство будет однородным и изотропным, а
время – однородным. Эта система и будет инерциальной системой отсчета.