

Вишукування і детальне розмічування траси автомобільної дороги
1. Траса автомобільної дороги, її геометричні елементи
Траса є віссю майбутньої дороги. Проект траси дороги складають на картах масштабів 1 : 100 000 - 1 : 100 00. На складних за рельєфом ділянках використовують плани масштабів 1 : 5000 - 1 : 2000.
Камеральне трасування - це розробка проекту траси на карті.
Початково трасу дороги на карті між заданими початковою і кінцевою точками прокладають у вигляді полігона. Далі у точках повороту траси прямі лінії сполучають коловими або складнішими кривими, які забезпечують плавний та безпечний рух автомобільного транспорту на поворотах дороги. На завершальному етапі проектування траса має вигляд послідовності прямих і кривих ліній.
Розглянемо схему траси автомобільної дороги (рис. 1):
між якими на поворотах траси розміщуються криві.
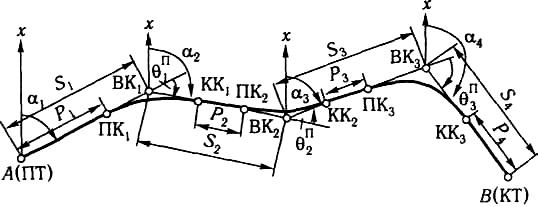
Рис. Схема траси автомобільної дороги
кут
повороту позначають буквоюз![]() відповідним
індексом
відповідним
індексом![]()
Кутом
повороту траси
![]() називають
кут, розміщений між продовженням
колишнього напрямку траси і новим її
напрямком. Розрізняють
ліві й праві кути повороту. Якщо траси
повертають праворуч,
називають
кут, розміщений між продовженням
колишнього напрямку траси і новим її
напрямком. Розрізняють
ліві й праві кути повороту. Якщо траси
повертають праворуч,
то
кут повороту називають правим![]() ,
при повороті ліворуч — лівим
,
при повороті ліворуч — лівим![]() *У деяких таблицях і довідкових джерелах
для розмічування кривих кути повороту
позначають буквою
*У деяких таблицях і довідкових джерелах
для розмічування кривих кути повороту
позначають буквою![]()
![]()
![]() і
сумі
і
сумі
довжин
кривих![]() вставок,
тобто
вставок,
тобто
![]()
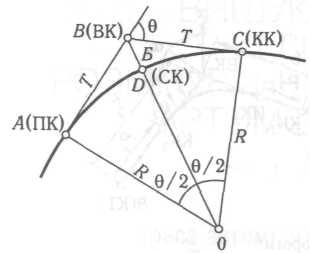
Геометричні елементи колової кривої
 Розглянемо
обчислення геометричних елементів
колової кривої (рис.
95).
Розглянемо
обчислення геометричних елементів
колової кривої (рис.
95).
Рис. 95. Геометричні елементи колової
У
проекті траси дороги задано кут повороту![]() і
радіус R
колової
кривої на заданій вершині кута повороту
ВК. Відстані АВ
= ВС називають
тангенсами,
їх
вимірюють у метрах*.
і
радіус R
колової
кривої на заданій вершині кута повороту
ВК. Відстані АВ
= ВС називають
тангенсами,
їх
вимірюють у метрах*.
Дуга кола ADC є кривою, а відрізок BD = Б- бісектрисою.
(84)![]()
![]() і
R.
Із
прямокутного
трикутника АБО
випливає:
і
R.
Із
прямокутного
трикутника АБО
випливає:
![]()
Довжина Бісектриса
(85)
![]()
![]()
Під час розмічування колових кривих використовують величину
2Т - К = Д, (86)
![]()
![]()
кривої
За формулами (83), (84), (85) і (87)
обчислено спеціальні таблиці [5, 9], які значно спрощують розрахунки. У цих таблицях подано також значення Д, обчислені за рівністю (87). Якщо значення Д, отримані з формул (86) і (87), однакові, це свідчить про те, що значення Т і К обчислені правильно.
Задання початкового напрямку траси
Після
затвердження проектного варіанта траси
роблять польове трасування,
за якого на місцевості розмічують і
закріплюють кілочками всі головні
точки і геометричні елементи за графічними
значеннями кутів 6,-і
відстаней![]() виміряних
на плані з високою точністю й ретельністю.
виміряних
на плані з високою точністю й ретельністю.
Розмічування починають із задання початкового напрямку траси. Розглянемо розв'язання цієї задачі за допомогою бусолі, встановленої на колонці труби.
Перед початком роботи обчислюють магнітний азимут початкового напрямку траси
![]()
де![]() —
дирекційний кут початкового напрямку,
який вимірюють на плані
геодезичним транспортиром;
—
дирекційний кут початкового напрямку,
який вимірюють на плані
геодезичним транспортиром;
![]() —
зближення меридіанів у точці початку
траси, що обчислюють за формулою (8); 8 —
магнітне схилення,
яке обчислюють за формулою (11) на рік
вирішення задачі.
—
зближення меридіанів у точці початку
траси, що обчислюють за формулою (8); 8 —
магнітне схилення,
яке обчислюють за формулою (11) на рік
вирішення задачі.
У початковій точці траси ПТ встановлюють теодоліт і приводять у робочий стан (центрують, горизонтують). На колонці труби закріплюють бусоль. Працюють при КЛ. На горизонтальному крузі теодоліта встановлюють відлік 0°00'00", закріплюють алідаду і відкріплюють лімб.
Із відліком 0°00'00" теодоліт обертають так, щоб кінці магнітної стрілки бусолі сумістилися з двома протилежними позначками на бусольному кільці. У цьому положенні теодоліта його труба буде спрямована уздовж магнітного меридіана, який проходить через початок траси. Далі відпускають алідаду, теодоліт обертають і на горизонтальному крузі встановлюють відлік Ам. Труба теодоліта буде напрямлена уздовж початкового напрямку траси.
Уздовж візирної осі труби виставляють віху а' на максимальній відстані, яка визначається умовами видимості (рис. 96).

Рис.
96. Схема задання початкового напрямку
траси за допомогою бусолі
Трубу переводять через зеніт і при КП повторюють усі операції. Уздовж візирної осі труби виставляють другу віху а". Відстань а!а" між віхами ділять навпіл і на середині а'а" встановлюють кілочок. Це і буде остаточний початковий напрямок траси, вільний від впливу колімаційної похибки труби.
Велике значення для всієї методики розмічування траси на місцевості має реальна оцінка похибки задання її початкового напрямку. Обчислимо її.
Похибка
вимірів дирекційного кута початкового
напрямку траси на плані
за допомогою геодезичного транспортира
дорівнює ±12-15'. Похибками
кутів
![]() можна
знехтувати, оскільки вони порівняно
невеликі.
Отже, для обчислення магнітного азимута
за виміряним на плані
дирекційним кутом похибку
можна
знехтувати, оскільки вони порівняно
невеликі.
Отже, для обчислення магнітного азимута
за виміряним на плані
дирекційним кутом похибку![]() можна
вважати такою, що дорівнює
±15'.
можна
вважати такою, що дорівнює
±15'.
За
довжини початкового напрямку траси
![]()
![]() =
1 км кінцева точка цього
відрізка траси відхилиться в поперечному
до траси напрямку на величину
=
1 км кінцева точка цього
відрізка траси відхилиться в поперечному
до траси напрямку на величину![]()
тобто на кожний кілометр довжини траси її поперечний зсув відносно проектного положення дорівнює приблизно ±10 м.
Результати задання початкового напрямку траси можна поліпшити, якщо є можливість прив'язати початок траси до розміщених поблизу пунктів геодезичної мережі. Схему задання початкового напрямку напрямку траси на основі прив'язки траси до геодезичних пунктів зображено на рис. 97.
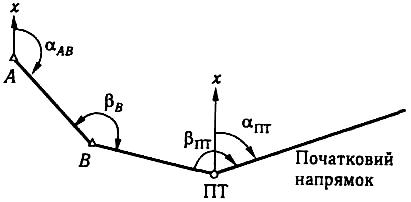
Рис.
97. Схема задання початкового шляхом
прив'язки початку
до геодезичної мережі
По
координатах![]() геодезичних
пунктів А
і
В
визначають
дирекційний кут
геодезичних
пунктів А
і
В
визначають
дирекційний кут![]() напрямку
АВ,
вирішуючи
зворотну
геодезичну задачу (див.
п. 6.12).
напрямку
АВ,
вирішуючи
зворотну
геодезичну задачу (див.
п. 6.12).
На пункті В вимірюють
прилеглий
кут![]() одним
повним прийомом і обчислюють дирекційний
одним
повним прийомом і обчислюють дирекційний
кут
напрямку![]()
![]()
Далі
обчислюють кут![]() у
точці «початок траси»
у
точці «початок траси»
![]()
де (Хрт — дирекційний кут початкового напрямку траси, виміряний на плані геодезичним транспортиром.
У
точці ПТ встановлюють теодоліт і
приводять у робоче положення (центрують,
горизонтують). При «крузі ліво» на
горизонтальному крузі теодоліта
встановлюють відлік 0°00'00", закріплюють
алідаду і відкріплюють
лімб. При відліку 0°00'00" трубу наводять
на точку В
і
закріплюють
лімб. Далі відкріплюють алідаду і на
горизонтальному крузі встановлюють
відлік, що дорівнює обчисленому куту![]()
Труба теодоліта при цьому буде напрямлена уздовж початкового напрямку траси. На лінії візирної осі труби виставляють віху.
Трубу теодоліта переводять через зеніт і при КП усі операції повторюють. На лінії візування уздовж початкового напрямку траси виставляють другу віху. Відстань між першою і другою віхами ділять навпіл і посередині забивають кілочок, який і фіксуватиме початковий напрямок траси.
Проаналізуємо
похибку задання початкового напрямку
траси викладеним
способом. Із опису випливає, що при
заданні початкового напрямку
![]() використовують
кути
використовують
кути![]() (див.
рис. 97), тому похибки
цих
кутів і визначатимуть точність задання
початкового напрямку, тобто
(див.
рис. 97), тому похибки
цих
кутів і визначатимуть точність задання
початкового напрямку, тобто
Проте![]()
![]() .
тому
.
тому![]()
Остаточно отримаємо
![]() ,
виміряного
,
виміряного![]() на
плані транспортиром, дорівнює 15'. Сумарна
похибка
задання початкового напрямку траси
дорівнюватиме
на
плані транспортиром, дорівнює 15'. Сумарна
похибка
задання початкового напрямку траси
дорівнюватиме
![]()
Поперечне зміщення точки наприкінці початкового напрямку траси завдовжки 1 км становитиме, м:
![]()
тобто приблизно вдвічі менше, ніж при заданні напрямку за допомогою бусолі. Звідси можна зробити висновок, що задання початкового напрямку траси прив'язкою до геодезичної мережі в багатьох випадках є точнішим розв'язанням задачі.
Слід наголосити, що схема прив'язки до геодезичної мережі описує найпростіший випадок. На практиці можуть траплятися й інші складніші умови прив'язки, коли між точками В і ПТ потрібно буде прокладати так званий прив'язний полігон із кількох точок. Точність прив'язки у таких випадках буде нижчою, ніж у розглянутій схемі. Однак інженер повинен вміти точно і правильно розмічувати за будь-яких розміщень початку траси відносно пунктів геодезичної мережі.
Зміщення точок траси на місцевості відносно їх проектних положень на плані траси спричинене дією похибок кутових і лінійних вимірів, знижує якість проектних рішень, викривлює проектні значення параметрів дороги, погіршує геометрію і транспортно-експлуатаційні якості дороги, підвищує вартість її будівництва. Тому проблема підвищення точності розмічування траси на місцевості є однією з основних у дорожньо-будівельному будівництві. Вирішують її шляхом контролю задання початкового напрямку траси і періодичних прив'язок її до пунктів геодезичної мережі або надійних і зручно розміщених орієнтирів місцевості.
Періодичність
прив'язки траси до геодезичної мережі
залежить від точності
геодезичних вимірювань при вишукуваннях
і розмічуванні траси, складності
рельєфу, категорії автомобільної дороги.
Вона коливається від 11-16 км для доріг V
категорії
на рівневій місцевості до 3-5 км для доріг
І категорії в гірській місцевості, при
середній похибці кутових вимірів![]() =
±1,5'. Докладніше це питання розглядається
під час вивчення
теми «Будівництво автомобільних доріг».
=
±1,5'. Докладніше це питання розглядається
під час вивчення
теми «Будівництво автомобільних доріг».
![]()
Метод контролю задання напрямків ліній траси
Нехай на місцевості задано початковий напрямок траси ПК (рис. 98), що проходить на відстані кількох сотень метрів від геодезичного пункту або орієнтира місцевості О. Пункт О є на плані траси. Для контролю положення напрямку ПК опускають перпендикуляр ОБ із точки О на ПК і вимірюють його довжину на плані й місцевості. Оскільки побудову перпендикуляра на місцевості з високою точністю виконати складно, визначають його довжину непрямим методом.
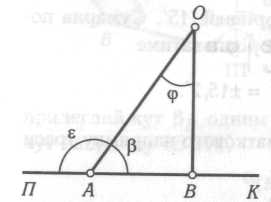
Рис.
98. Метод контролю задання початкового
напрямку траси
Із прямокутного трикутника АОВ випливає
![]()
Позначимо
довжину перпендикуляра ОВ,
виміряну
на плані, символом![]() ,
а довжину перпендикуляра, виміряну на
місцевості, — символом /'. Обчислимо
поправку до кута
,
а довжину перпендикуляра, виміряну на
місцевості, — символом /'. Обчислимо
поправку до кута![]() ,
за допомогою якого було задано початковий
напрямок траси
,
за допомогою якого було задано початковий
напрямок траси
![]()
де![]() —
поправка до дирекційного кута
—
поправка до дирекційного кута![]() ;
;![]() —
радіан у
—
радіан у
мінутах; L — довжина початкової ділянки траси ПВ, на якій виконується контроль.
Для
визначення L
обчислюють
відстань ПА
з
використанням пікетажних положень
точок*, розміщених на ПА,
і
обчислюють відрізок
![]() Остаточно
отримують
Остаточно
отримують![]() =
ПА
+ АВ.
=
ПА
+ АВ.
Далі
в точці П
встановлюють
теодоліт, трубу наводять на одну з точок,
зафіксованих на початковому напрямку,
і до відліку на горизонтальному
крузі п
додають
поправку зі своїм знаком. Діючи
мікрометричним
гвинтом алідади, встановлюють на
горизонтальному крузі відлік
![]() і
уздовж візирної осі труби фіксують
точку виправленого початкового
напрямку траси. Задачу вирішують при
КП і КЛ, щоб уникнути впливу
колімаційної похибки труби.
і
уздовж візирної осі труби фіксують
точку виправленого початкового
напрямку траси. Задачу вирішують при
КП і КЛ, щоб уникнути впливу
колімаційної похибки труби.
Аналогічно здійснюють контроль задання напрямків усіх наступних ліній траси. Важливою позитивною якістю методу є те, що для йогозастосування потрібно мати всього один пункт геодезичної мережі або орієнтир місцевості. Традиційні методи прив'язки і контролю потребують щонайменше двох опорних пунктів, що не завжди є на місцевості [2,4].
Досліди показують, що метод забезпечує обчислення поправки а з точністю ±4'-5'.