

4. Основные динамические свойства привода с позиционной обратной связью.
Схема простейшего следящего гидропривода с дроссельным регулированием скорости выходного звена показана на рис.1.16. На этой схеме показан исполнительный механизм привода. Золотник гидрораспределителя перемещается с помощью некоторого электромеханического или электрогидравлического устройства.

Таким устройством может быть:
электромеханический преобразователь сигналов (линейный электродвигатель);
электрогидравлический усилитель мощности типа «сопло – заслонка» или «струйная трубка»;
специальный маломощный сервопривод с электрической обратной связью по положению золотника основного гидрораспределителя.
Последний из указанных вариантов характерен для приводов с большими (свыше 100 л/мин) расходами рабочей жидкости.
Блок-схема следящего привода показана на рис.1.17.
Коэффициент передачи прямой цепи следящего привода определяется выражением:

В этом выражении приняты следующие отношения:
Кiu – коэффициент усиления электрических сигналов;
Кхi – коэффициент передачи устройства управления золотником гидрораспределителя (коэффициент передачи электрогидравлического усилителя мощности - ЭГУ);
Ue – сигнал рассогласования между управляющим сигналом и сигналом позиционной обратной связи.
Структурная схема типового следящего привода с дроссельным регулированием скорости, управляющего положением инерционного объекта, часто представляется в виде, который показан на рис.1.18.
Произведение коэффициента передачи прямой цепи по скорости на коэффициент позиционной обратной связи представляет собой добротность следящего привода – KD.

С учетом приведенных обозначений передаточная функция разомкнутого привода имеет следующий вид:
 .
.
Из этого выражения можно выделить функционал, который является передаточной функцией электрогидравлического усилителя мощности (или мощного электромеханического преобразователя сигналов, или сервопривода) по перемещению золотника основного гидрораспределителя:

Такая передаточная функция приближенно описывает наиболее существенные динамические свойства большинства устройств, преобразующих электрический сигнал в виде тока управления iу или входного напряжения сервопривода золотника основного гидрораспределителя привода в перемещение его золотника (Хз) в диапазоне частот управления авиационными приводами.
xi - частота среза указанного устройства (электрогидравлического усилителя, преобразователя сигналов или сервопривода), т.е. частота, на которой фазочастотная характеристика достигает уровень -90.
xi - коэффициент относительного демпфирования преобразователя сигналов.
Во многих проектных случаях электрогидравлические усилители мощности обладают высоким быстродействием, которое характеризуется параметром xi . Если выполняется условие
![]() ,
,
то передаточная функция разомкнутого контура привода может быть представлена без существенной погрешности в следующем виде:
 .
.
Фазочастотная
характеристика разомкнутого контура
такого привода пересекает линию - 180
всегда на частоте
![]() .
Это обстоятельство позволяет производить
оценку устойчивости следящего привода
[9] путем проверки следующего простого
условия:
.
Это обстоятельство позволяет производить
оценку устойчивости следящего привода
[9] путем проверки следующего простого
условия:
 .
.
Если условие не выполняется, то оценку устойчивости привода следует осуществлять с учетом динамики устройства, преобразующего сигнал управления в перемещение золотника гидрораспрелителя (электрогидравлического усилителя мощности, электромеханического преобразователя сигналов или сервопривода).
Передаточная функция замкнутого привода при выполнении условия представляется в виде:
 .
.
Эта передаточная функция приближенно характеризует динамические свойства следящего привода, управляющего положением инерционного объекта.
Если привод установлен на упругом основании с жесткостью Со и соединен с инерционным объектом упругой механической системой (проводкой) с жесткостью Сп , так как это показано на рис.1.19, то передаточная функция замкнутого по положению поршня привода определяется выражением:
 ,
,
В этой передаточной функции приняты следующие обозначения:
ос – собственная частота системы привода установленного на упругом основании с жесткостью Со, и жесткостью силовой проводки от поршня к инерционному объекту Сп ;
ос – коэффициент относительного демпфирования системы привода.

Указанные параметры определяются следующими выражениями:

На первый взгляд приведенное выражение показывает, что снижением жесткости конструкции (Ск) можно увеличить устойчивость привода, поскольку с уменьшением этого параметра увеличивается третья из составляющих демпфирования. Однако можно показать, что снижением Ск нельзя увеличить запас устойчивости привода по амплитуде. В соответствии с условием устойчивости привода

снижением жесткости конструкции установочных узлов привода Ск нельзя увеличить приведенное выше неравенство в сторону увеличения запасов устойчивости, т.к. при уменьшении жесткости конструкции одновременно с увеличением демпфирования снижается и собственная частота привода. На рисунках 1.20, 1.21, 1.22 показаны динамические характеристики типового следящего привода, частота среза электрогидравлического усилителя мощности (ЭГУ) которого примерно в три раза превышает собственную частоту исполнительного механизма с инерционной нагрузкой.
Расчет
этих характеристик производился с
учетом и без учета динамики ЭГУ. На
рис.1.20 представлены логарифмические
частотные разомкнутого контура привода
с учетом динамики ЭГУ.
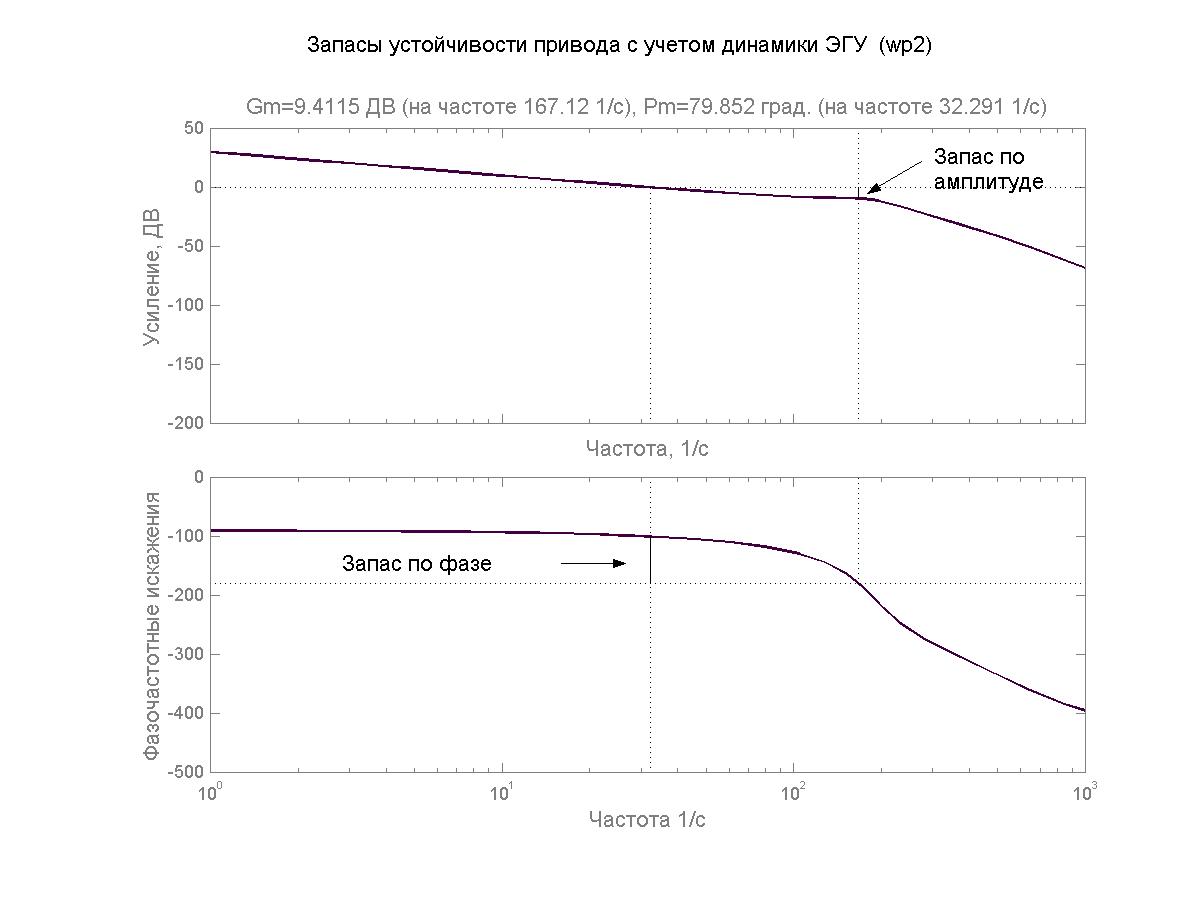
Рис.1.20
На
рис.1.21 показаны те же характеристики,
но без учета динамики ЭГУ. На этих
характеристиках показаны запасы
устойчивости привода по амплитуде Gm
и по фазе – Pm.
На рис.1.22 показаны переходные процессы
следящего привода на ступенчатый сигнал
с учетом динамики ЭГУ – G2
и без учета динамики ЭГУ – G1.
Сравнивая приведенные характеристики
можно предположить, что для предварительной
оценки динамики следящего привода при
выполнении неравенства
![]() можно
динамику ЭГУ или другого устройства,
выполняющего его функции, не учитывать.
можно
динамику ЭГУ или другого устройства,
выполняющего его функции, не учитывать.
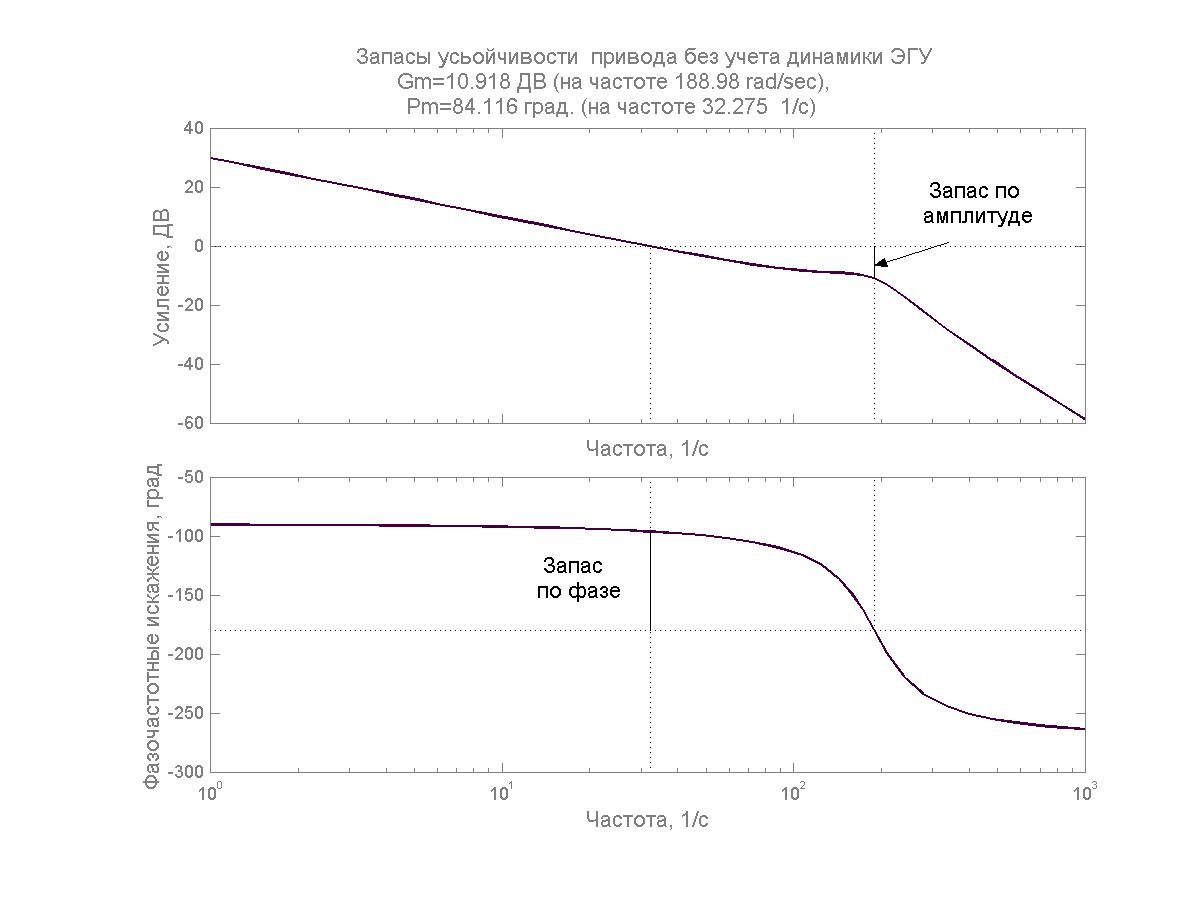
Рис.1.21
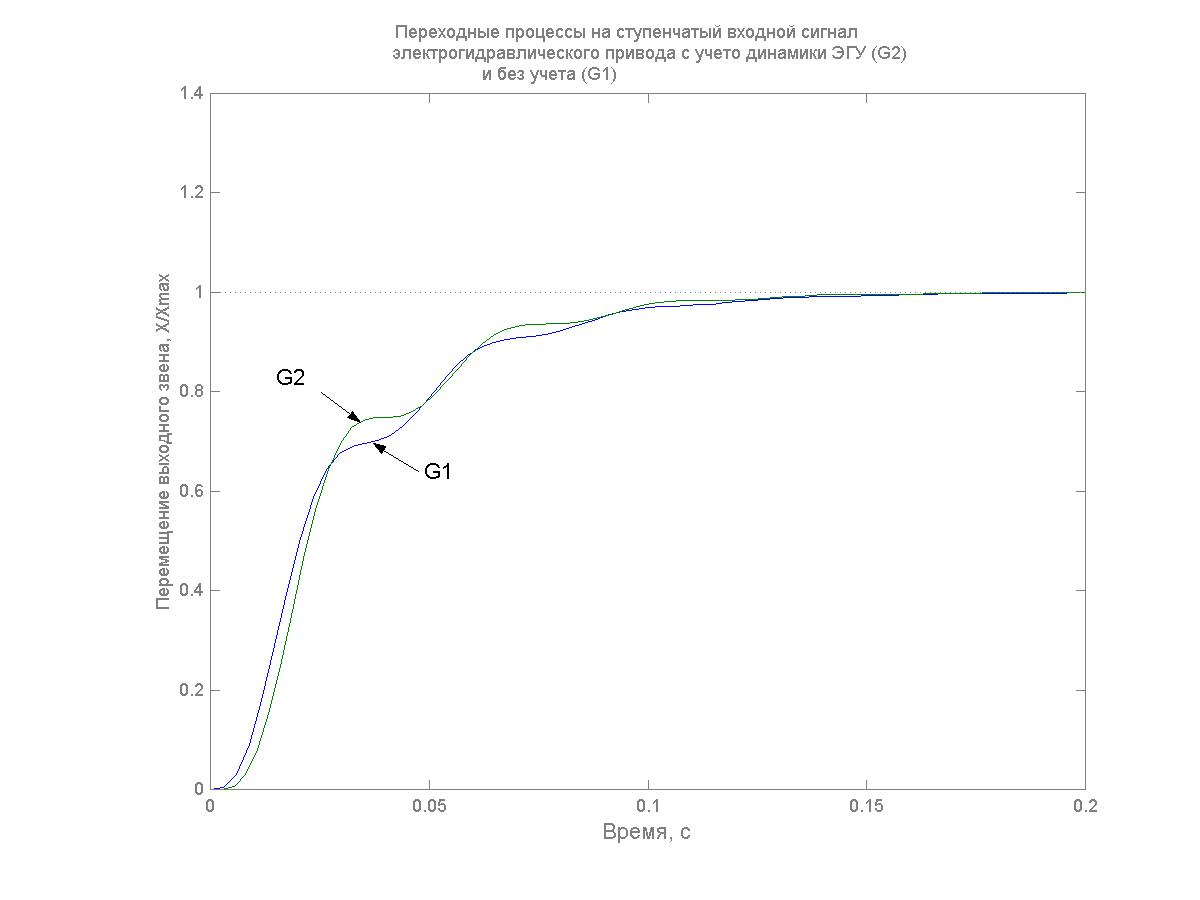
Рис.1.22