

4. Задача № 7.
1. Датчики угла поворота: однофазные сельсины, вращающиеся трансформаторы - принцип действия, схемы включения, характеристики.
П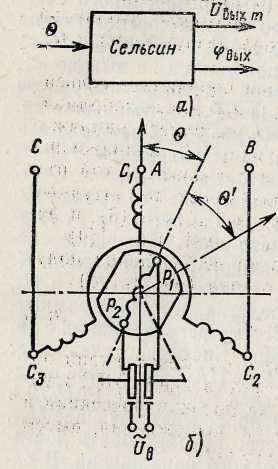 од
термином «датчики угла» понимаются
устройства,
преобразующие угловую координату в
электрическое напряжение.
Это напряжение используется в системах
АЭП
как сигнал обратной связи по углу или
как управляющий
сигнал в задающих устройствах. Датчики
угла находят
применение в следящих системах для
измерения угла
поворота исполнительного вала. Задание
на движение системы может выполняться
также с помощью датчика
угла, угловой координатой которого
является угол поворота
командной (задающей) оси. Разность
сигналов
этих двух датчиков, та» называемое
«рассогласование»,
подается как управляющий
сигнал на вход системы.
В этом случае оба датчика
могут рассматриваться
объединение как «датчик рассогласования».
Задание на
угловое перемещение может
формироваться и без датчика
угла с командной осью.
Тогда используется эквивалент
командной оси, т.
е. заданная угловая координата
выступает в закодированном
виде, например в. форме цифровой
программы.
В таких системах с программным
од
термином «датчики угла» понимаются
устройства,
преобразующие угловую координату в
электрическое напряжение.
Это напряжение используется в системах
АЭП
как сигнал обратной связи по углу или
как управляющий
сигнал в задающих устройствах. Датчики
угла находят
применение в следящих системах для
измерения угла
поворота исполнительного вала. Задание
на движение системы может выполняться
также с помощью датчика
угла, угловой координатой которого
является угол поворота
командной (задающей) оси. Разность
сигналов
этих двух датчиков, та» называемое
«рассогласование»,
подается как управляющий
сигнал на вход системы.
В этом случае оба датчика
могут рассматриваться
объединение как «датчик рассогласования».
Задание на
угловое перемещение может
формироваться и без датчика
угла с командной осью.
Тогда используется эквивалент
командной оси, т.
е. заданная угловая координата
выступает в закодированном
виде, например в. форме цифровой
программы.
В таких системах с программным
Рис. 6.1; Координаты (а) и электрическая схема сельсина (б)
управлением выходной сигнал датчика угла исполнительного вала вводится в программное устройство, вырабатывающее задание на движение. В простейших случаях датчик угла используется как бесконтактный потенциометр, командоаппарат, фазовращатель.
Для датчиков угла и рассогласования широкое применение нашли сельсины и вращающиеся трансформаторы
Сельсины
Эл машины синхронной связи служат для синхронного и синфазного поворота или вращения двух осей механически не связанных между собой.Синхронную связь осуществляют с помощью двух одинаковых электрически соединенных между собой индукционных машин-сельсинами(самосинхронизирующийся)Одна из этих машин механически соединена с ведущей осью(датчик) а другая с ведомой осью(приемник)
Сис-ма синхронной связиработает так что при повороте ротора С-Д на угол 0д ротор С-П поворачивается на такой-же угол 0п.Сис-ма стремится ликвидировать рассогласование между положениями роторов датчика и приемника
Индикаторный режим работы-ротор С-П соединяют непосредственно с ведомой осью
Трансформаторный-сигнал о наличии рассогласования между положениями роторов датчика и приемника подается через усилитель на исполнительный ЭД который поворачивает ведомую ось и ротор С-П ликвидируя рассогласование
Принцип действия трансформаторного режима:при работе обмотка(В) С-Д подключена к сети однофазного тока а обмотка(В) С-П-к усилителю(У)подающему питание на обмотку исполнительного двигателя(ИД) ЛС-линия связи Переменный ток проходя по обмотке(В)С-Д создает пульсирующий Фмаг который индукцирует ЭДС Значит в ЛС будет протекать ток и в С-П создастся свой Фмаг Если будет рассогласование то будет андуктироваться ЭДС и появиться Uвых которое через (У) подается на обмотку ИД который поворачивает ведомую ось О2 совместно с ротором приемника
Принцип действия индикаторного режима:на валу С-П есть небольшой момент сопротивления поэтому для поворота ротора приемника вслед за поворотом ротора датчика нужен небольшой вращающийся момент который можно получить без доп усилительных устройств При работе обмотки(В) С-Д и С-П включены в общую сеть переменного токаПульсирующие Фмаг С-Д и С-П индутируют ЭДС в трех фазах обмоток синхронизации Если имеется рассогласование то по обмоткам синхронизации протекают токи взаимодействуя с Фв и создавая синхронизирующие моменты Эти моменты имеют противоположные направления и стремятся свести угол рассогласования к нулю Ротор С-Д и С-П поворачиваютсяв ту же сторону и на тот-же угол но ротор С-Д-заторможен
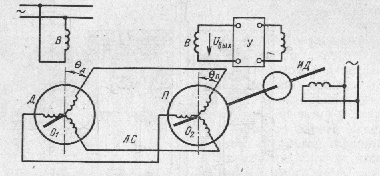
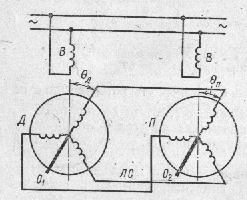
Схема при трансформаторном режиме при индикаторном режиме