

Формулы для определения главного вектора и главного момента в декартовой системе координат
Модуль главного вектора
![]() ,
(5)
,
(5)
где
![]() ,
,
![]() ,
,
![]() (6)
(6)
(Rx, Ry, Rz — проекции главного вектора на соответствующие оси координат). Углы, образованные главным вектором с соответствующей осью координат:
![]() ,
,
![]() ,
,
![]() .
(7)
.
(7)
Модуль главного момента относительно выбранного центра приведения O:
![]() (8)
(8)
где
![]() ,
,
![]()
![]() (9)
(9)
( , , — проекции главного момента относительно точки О на координатные оси).
Если заданы проекции сил на оси и координаты точек их приложения, то выражения (9) имеют вид
![]() ,
,
![]() ,
,
![]() (10)
(10)
Углы, образованные главным моментом с соответствующими осями координат:
![]() ,
,
![]() ,
,
![]() .
(11)
.
(11)
Зависимость главного момента от выбора центра приведения
Главный момент относительно нового центра приведения равен сумме главного момента относительно старого центра приведения и векторного произведения радиуса-вектора, соединяющего эти центры, на главный вектор:
![]() .
(12)
.
(12)
где
![]() — главный момент относительно
центра
— главный момент относительно
центра
![]() ;
—
главный
момент относительно центра
;
—
главный
момент относительно центра
![]() ;
;![]() — радиус-вектор, соединяющий
центры
и
;
— радиус-вектор, соединяющий
центры
и
;
![]() —
главный вектор.
—
главный вектор.
Частные случаи приведения системы сил
В зависимости от модулей главного вектора и главного момента и их взаимного направления можно произвести дальнейшее упрощение системы сил.
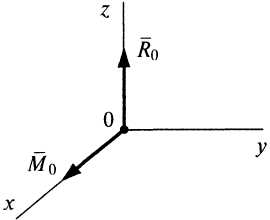
Приведение к паре сил
![]() ,
,
![]() ,
,
![]() .
.
Система сил приводится к одной паре сил, равной главному моменту и не зависящей от выбора центра приведения.
Приведение к равнодействующей
a)
![]() ,
,
![]() ,
.
,
.
Система сил приводится к равнодействующей, равной главному вектору по модулю и направлению и проходящей через центр приведения.
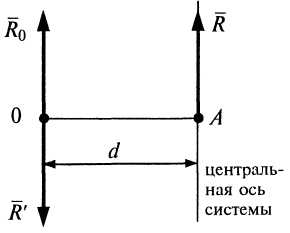
б)
,
,
,
т.е.
![]() .
.
Система
сил приводится к равнодействующей,
равной по модулю и направлению главному
вектору и отстоящей от центра приведения
на расстоянии
![]() .
Линия действия равнодействующей
называется центральной осью системы.
.
Линия действия равнодействующей
называется центральной осью системы.
П
Рисунок
Рисунок 5
риведение системы сил к динаме (динамическому винту)
,
,
![]() .
.
Система сил приводится к динаме (динамическому винту). Динамой называют совокупность силы и пары сил, векторный момент которой направлен параллельно вектору силы. Линию действия динамы называют центральной винтовой осью (рис.).
Г
Рисунок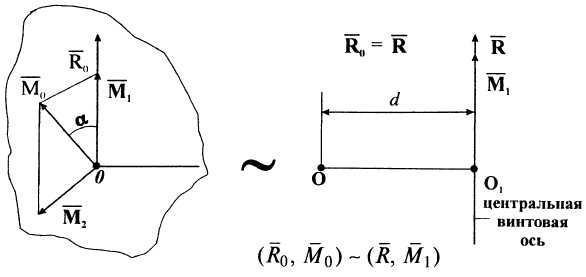 лавный
момент раскладываем на направление
главного вектора и перпендикулярно
главному вектору:
лавный
момент раскладываем на направление
главного вектора и перпендикулярно
главному вектору:
![]() ,
,
![]() ,
,
![]() .
.
Так
как
(рис. а), то эта система сил приводится
к равнодействующей, которая
находится от точки приведения на
расстоянии:
![]() .
Пара
сил с векторным моментом
является
свободным вектором и поэтому
перенесем в точку
,
где приложена равнодействующая
(рис. б).
Получим
в точке
систему,
эквивалентную исходной системе
сил:
.
Пара
сил с векторным моментом
является
свободным вектором и поэтому
перенесем в точку
,
где приложена равнодействующая
(рис. б).
Получим
в точке
систему,
эквивалентную исходной системе
сил:
![]() ,
где
,
где
![]() — динама.
— динама.
Теорема Вариньона о моменте равнодействующей
Момент равнодействующей системы сил относительно произвольной точки равен геометрической сумме моментов составляющих сил относительно этой точки:
![]() (13)
(13)
Момент равнодействующей системы сил относительно любой оси равен алгебраической сумме моментов составляющих сил относительно этой оси:
![]() (14)
(14)