

6.2. Общеземной эллипсоид
Для решения глобальных задач высшей геодезии условие (критерий) 6.4 выполняют для всех пунктов глобальной геодезической сети, расположенной по всей поверхности Земли. Подобранный таким образом земной эллипсоид называют общеземным эллипсоидом. Выполнения условия (6.4) по всей поверхности Земли необходимо, но недостаточно для того, чтобы земной эллипсоид имел бы право называться общеземным эллипсоидом. Помимо этого необходимо, чтобы были выполнены еще несколько условий или требований, предъявляемых к общеземному эллипсоиду. Центр общеземного эллипсоида должен совпадать с центром масс Земли. Малая ось общеземного эллипсоида должна совпадать с положением оси суточного вращения Земли, условно принятым на некоторую исходную фундаментальную эпоху. Объем общеземного эллипсоида должен быть равен объему геоида. Существуют и другие требования к общеземному эллипсоиду [17].
Земной эллипсоид используют для задания геодезической эллипсоидальной системы координат пунктов, смотри подраздел 7.2. Именно на поверхность земного эллипсоида редуцируют результаты угловых и линейных измерений для их последующей обработки [17].
7. Системы координат, которые используют в высшей геодезии
При написании этого раздела использованы следующие работы [3,9,11,14,16,17,18,21,27,31,32].
В геодезии, также как и в навигации, используют земные системы координат. Такие системы координат тем или иным образом связаны с Землей и вращаются (движутся) вместе с Землей в космическом пространстве. Земные системы координат различают по их типу и по тому, как именно они фиксированы относительно Земли. В геодезии и в навигации используют прямоугольную (декартову) геодезическую систему координат X, У, Z и эллипсоидальную геодезическую систему координат В, Ly H. Рассмотрим земную прямоугольную (декартову) геодезическую систему координат X1Y1 Z1 связанную с осью вращения Земли. Эту систему координат иллюстрирует рисунок 7.1.
Начало координат О этой геодезической системы координат совпадает, по определению, с центром масс Земли. Ось Z1 совпадает, опять же по определению, с мгновенным на эпоху наблюдений положением оси вращения Земли; положительным концом эта ось направлена в сторону севера. Ось Х1 — это линия пересечения плоскости астрономического экватора с плоскостью начального астрономического Гринвичского меридиана. Ось Y1 также лежит в плоскости астрономического экватора и до-
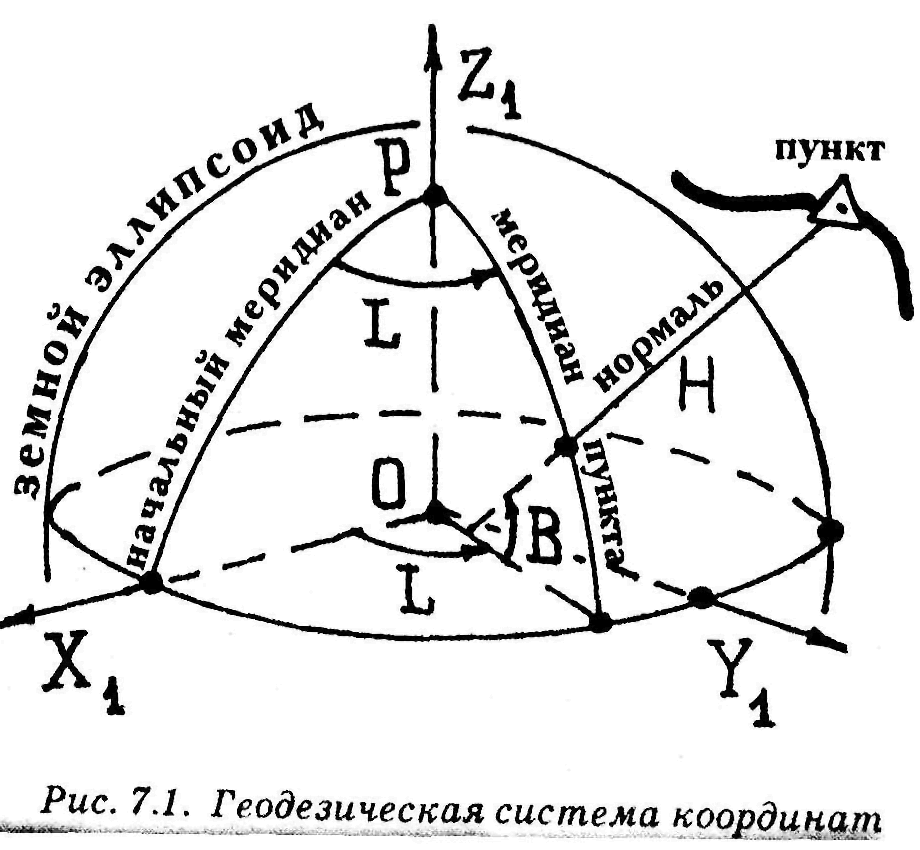
полняет систему координат до правой. Другими словами, ось У1 повернута в сторону востока на 90 градусов от оси X1
В общем случае, для перехода от одной прямоугольной (декартовой) геодезической систему координат к другой прямоугольной (декартовой) геодезической системе координат путем вращения, используют матрицу вращения R. В каждом конкретном случае эту матрицу формируют из элементарных ортогональных матриц вращения:
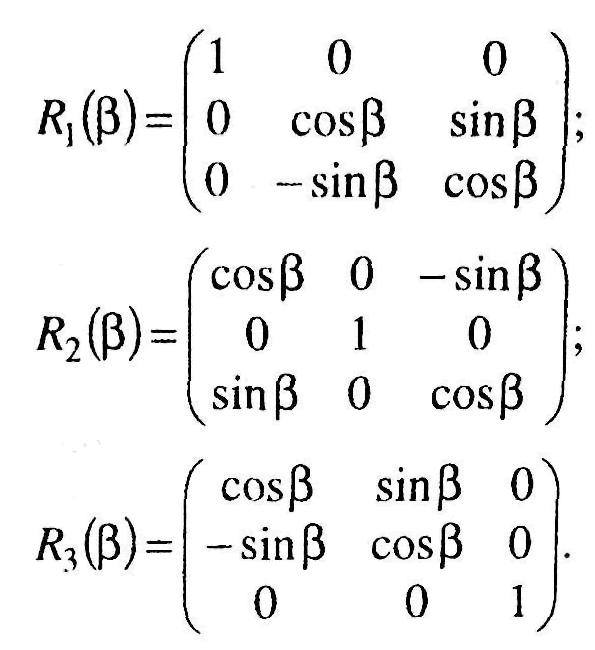 (7.1)
(7.1)
где
![]() -угол
вращения. Матрицу R формируют как
произведение всех этих трех элементарных
матриц, либо как произведение двух из
этих трех элементарных матриц, или
матрица вращения R может быть равна
какой-либо одной из этих трех
элементарных матриц [27,31,33].
-угол
вращения. Матрицу R формируют как
произведение всех этих трех элементарных
матриц, либо как произведение двух из
этих трех элементарных матриц, или
матрица вращения R может быть равна
какой-либо одной из этих трех
элементарных матриц [27,31,33].
Мгновенная земная система координат связана с реально существующей в пространстве осью вращения Земли. Поэтому данную систему координат можно реализовать практически. Обсерватории международной службы широты, позже названной международной службой движения полюса, измеряли астрономические широты нескольких пунктов, более или менее равномерно расположенных на одной параллели. Это позволяло фиксировать мгновенное местоположение полюса и определять его движения. Таково достоинство системы координат X1Y1Z1
Однако мгновенная земная система имеет и существенный недостаток. Ось вращения Земли, а вместе с ней и ось Z1 изменяет свое положение в теле Земли с течением времени. Данный эффект проявляется в движении полюса. Следовательно, с течением времени изменяют свое положение в теле Земли и оси X1Y1. По этой причине координаты неподвижных точек земной поверхности, выраженные в мгновенной земной системе координат, с течением времени изменяются.
Результаты измерений, выполненных в разные эпохи, необходимо редуцировать в единую систему координат. Такую фиксированную на некоторую исходную фундаментальную эпоху геодезическую прямоугольную (декартову) систему координат определяют следующим образом.
Ее начало О совпадает с центром масс Земли. Ось Z2 проходит через Международное Условное Начало (МУН) — Conventional international Origin (CIO). MУH представляет собой среднее положение северного полюса V ли в период с 1900 по 1905 год. После введения некоторых уточняют» поправок за нутацию [32} эта точка, как определено рекомендациям; Международной Службы Вращения Земли — International Earth Rotation Service (1ERS), известна теперь как Условный Земной Полюс • Conventional Terrestrial Pole (СТР). Плоскость геодезического экватора содержит начало координат системы и перпендикулярна оси Z2 .Ось X2 образована пересечением плоскости геодезического экватора и плоскости начального геодезического гринвичского меридиана. Ось У2 дополняет систему координат до правой. Эту систему, также как и мгновенную земную систему координат, можно иллюстрировать рисунком 7.1. Истинный полюс совершает движение вокруг СТР по кривой, напоминающей спираль, с «радиусом» около 15 метров. Основной причиной этого движения является несовпадение оси вращения Земли с осью инерции Земли. Этим вызвано так называемое Чандлеровское движение -Chandler wobble, совершающееся с периодом около 430 суток. Существуют и другие причины движения полюса. Местоположение мгновенного полюса относительно СТР, то есть его координаты хp и уp , определяют с ошибкой в несколько сантиметров методом радиоинтерферометрии со сверхдлинной базой (РСДБ) — Very Long Baseline Interferometry (VLBI) и методом лазерной локации искусственных спутников Земли — Satellite Laser Ranging (SLR).
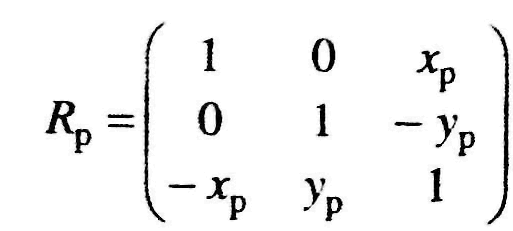
Переход от мгновенной земной геодезической системы координат к фундаментальной земной геодезической системе координат, то есть перевод геоцентрического вектора пункта из мгновенной системы координат X1Y1Z1 в фундаментальную геодезическую систему координат X2,Y2,Z2 выполняют умножением этого вектора на матрицу вращения
![]() Улы вращения малы, поэтому матрицу
вращения чаще всего представляют в
упрощенном виде:
Улы вращения малы, поэтому матрицу
вращения чаще всего представляют в
упрощенном виде:
Американская глобальная система позиционирования или система глобального позиционирования — GPS — использует систему координат WGS-84 (World Geodetic System 84). Российская глобальная (радно) навигационная система — ГЛОНАСС — использует координатную систему ПЗ-90 (Параметры Земли, принятые в 1990 году). По определению обе эти системы координат являются земными глобальными геодезическими геоцентрическими системами координат. Однако практическая реализация этих систем координат различна. Система WGS-84 фиксирована координатами станций слежения, распределенных более или менее равномерно по поверхности Земли. Система же ПЗ-90 фиксирована координатами станций слежения, расположенных только на территории России и ближайших стран Советского Союза. В GPS и в ГЛОНАСС используют разные спутники и разные методы слежения за спутниками. Поэтому координаты одного и того же пункта в WGS84 и в ПЗ-90 могут различаться на несколько метров.