

5. Физический аспект высшей геодезии
При написании этого раздела использованы следующие работы: [7,13,15,17,22].
До сих пор мы уделяли наше внимание проблемам высшей геодезии, которые имеют преимущественно геометрический характер. Другими словами, мы рассматривали геометрический аспект высшей геодезии. К рассмотрению этого геометрического аспекта мы вернемся. Сейчас же обратимся к проблемам высшей геодезии, которые имеют преимущественно физический характер, то есть рассмотрим физический аспект высшей геодезии. Соответствующие разделы высшей геодезии объединяют названием «физическая геодезия». Специалисты, работающие в этой области, решают преимущественно те задачи высшей геодезии, которые связаны с изучением параметров (характеристик) внешнего гравитационного поля (поля силы тяжести) Земли. Как было сказано в разделе 1, геометрический и физический аспекты высшей геодезии неразрывно связаны. Невозможно изучать и изучить фигуру Земли и изменения этой фигуры во времени, не изучая и не изучив внешнее гравитационное поле Земли. И наоборот, невозможно изучать и изучить внешнее гравитационное поле Земли и изменения параметров этого внешнего гравитационного поля, не изучив фигуру Земли. Такова научная постановка задачи высшей геодезии.
Практическая сторона проблемы состоит в следующем. На каждом пункте геодезической сети, имеющем приписанные ему координаты, необходимо с соответствующей точностью определить значение ускорения силы тяжести. И наоборот, если на пункте определено значение ускорения силы тяжести, то необходимо с соответствующей точностью определить координаты этого пункта.
Человек живет и работает в поле силы тяжести. Геодезист, устанавливая теодолит на пункте геодезической сети, делает это так, чтобы ось вращения алидады совпадала с направлением вектора силы тяжести. Все геодезические измерения выполняют именно в поле силы тяжести Земли. Это утверждение справедливо и для тех случаев, когда кажется, что поле силы тяжести не имеет никакого отношения к результатам измерений. Речь идет о спутниковых измерениях. В этом случае считают, что результаты измерений и результаты определений связаны чисто геометрически. На самом деле это не так. Движение спутников системы глобального позиционирования подвержено воздействию поля силы тяжести Земли. Влияние задержки радиосигнала спутника в атмосфере на результат измерения дальности до этого спутника зависит от поля силы тяжести Земли. Оператор устанавливает антенну спутникового приемника по уровню, а местоположение пузырька уровня определяется направлением вектора силы тяжести. Таким образом, и спутниковые измерения связаны с полем силы тяжести.
5.1. Характеристики поля силы тяжести Земли
В каждом пункте земной поверхности
существует вектор
![]()
![]() силы притяжения Земли. В этом же пункте
существует вектор
силы притяжения Земли. В этом же пункте
существует вектор
![]() центробежной силы, порожденной
суточным вращением Земли. Векторная
сумма этих двух сил представляет собой
вектор
центробежной силы, порожденной
суточным вращением Земли. Векторная
сумма этих двух сил представляет собой
вектор
![]() силы тяжести. В высшей геодезии его
называют также вектором поля силы
тяжести. В каждом пункте поверхности
Земли существует вектор
силы тяжести. В высшей геодезии его
называют также вектором поля силы
тяжести. В каждом пункте поверхности
Земли существует вектор
![]() ускорения силы тяжести Земли, а значит,
существует и модуль g вектора ускорения
силы тяжести. Вектор
определяют также как напряженность
гравитационного поля и как ускорение
свободного падения. Этот вектор является
векторной характеристикой
гравитационного поля. Именно значение
модуля вектора ускорения силы тяжести
определяют с помощью гравиметров. В
этом же пункте существует значение
потенциала поля реальной силы тяжести
Земли. Значение потенциала поля реальной
силы тяжести Земли обозначают W.
Прежде, чем дать понятие потенциала W
поля реальной силы тяжести Земли,
дадим понятие разности потенциалов
ускорения силы тяжести Земли, а значит,
существует и модуль g вектора ускорения
силы тяжести. Вектор
определяют также как напряженность
гравитационного поля и как ускорение
свободного падения. Этот вектор является
векторной характеристикой
гравитационного поля. Именно значение
модуля вектора ускорения силы тяжести
определяют с помощью гравиметров. В
этом же пункте существует значение
потенциала поля реальной силы тяжести
Земли. Значение потенциала поля реальной
силы тяжести Земли обозначают W.
Прежде, чем дать понятие потенциала W
поля реальной силы тяжести Земли,
дадим понятие разности потенциалов
![]() в двух пунктах А и В, расположенных на
поверхности Земли. Пусть пункт В
расположен выше пункта А на элементарном
расстоянии dh. Тогда элементарная
работа по перемещению точечного объекта,
обладающего единичной массой, против
воздействия силы тяжести из точки А в
точку В, равна:
в двух пунктах А и В, расположенных на
поверхности Земли. Пусть пункт В
расположен выше пункта А на элементарном
расстоянии dh. Тогда элементарная
работа по перемещению точечного объекта,
обладающего единичной массой, против
воздействия силы тяжести из точки А в
точку В, равна:
![]()
На самом деле пункт В может быть
расположен и ниже пункта А. И всегда
расстояние между пунктами А и В не
бесконечно мало, но конечно. Поэтому
работу по перемещению точечного объекта,
обладающего единичной массой, против
воздействия поля реальной силы тяжести
из пункта А в пункт В или разность
![]() потенциалов поля реальной силы тяжести
между этими двумя пунктами вычисляют
по следующей формуле:
потенциалов поля реальной силы тяжести
между этими двумя пунктами вычисляют
по следующей формуле:
![]()
В этой формуле интеграл является криволинейным, то есть его вычисляют по любой траектории (трассе) перемещения от пункта А до пункта В; dh — элементарное (нивелирное) превышение при перемещении между пунктами А и В; g — текущее значение модуля вектора ускорения силы тяжести на этом элементарном (нивелирном) превышении. Ситуация представлена на рисунке 5.1.
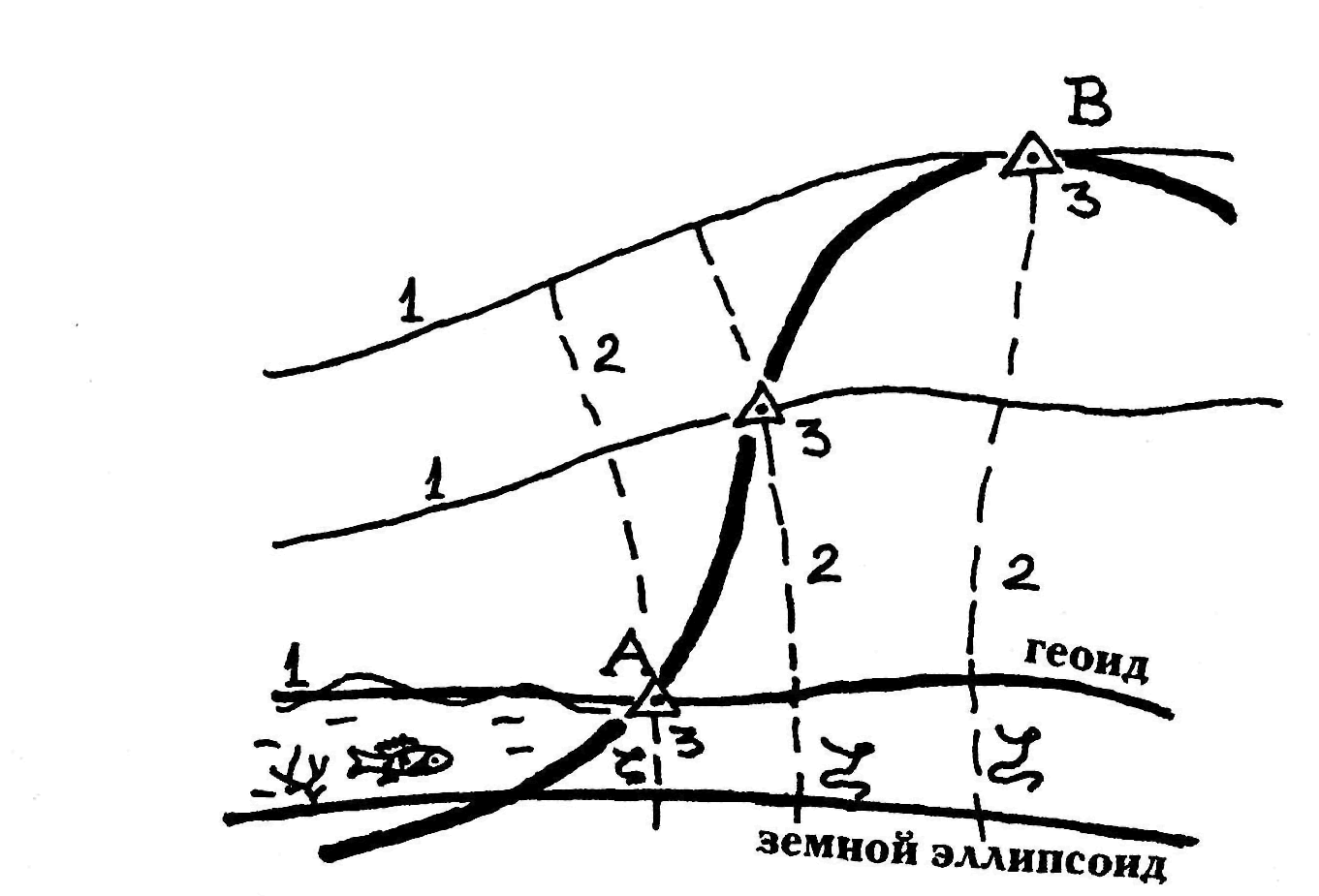
Рис. 5.1. Эквипотенциальные (уровенные) поверхности и силовые линии поля
реальной силы тяжести: I — эквипотенциальные (уровенные) поверхности; 2 — силовые линии; 3 — пункты геодезической сети (реперы)
Повторим, что пункту А и пункту В
присущи значения потенциала WA и WB поля
реальной силы тяжести. Разность
![]() ,
формула (5.2), этих потенциалов называют
геопотенциальным числом. Потенциал W
поля силы тяжести в пункте А — это работа
против поля силы тяжести» которую надо
совершить для перемещения единичной
точечной массы из этого пункта А в
бесконечность. То же самое справедливо
и для пункта В.
,
формула (5.2), этих потенциалов называют
геопотенциальным числом. Потенциал W
поля силы тяжести в пункте А — это работа
против поля силы тяжести» которую надо
совершить для перемещения единичной
точечной массы из этого пункта А в
бесконечность. То же самое справедливо
и для пункта В.
Вектор силы тяжести , напряженность поля силы тяжести или вектор ускорения поля силы тяжести , модуль этого вектора g, а также потенциал W силы тяжести являются характеристиками (параметрами) поля силы тяжести в данном пункте. Для полного описания поля силы тяжести в интересах высшей геодезии необходимо изучить распределение этих параметров в пространстве вокруг Земли и на поверхности Земли. Наиболее наглядным образом распределение потенциала силы тяжести вокруг Земли и на поверхности Земли описывают, введя понятия эквипотенциальной поверхности и силовой линии.
Эквипотенциальная поверхность — это замкнутая поверхность, на которой потенциал реального поля силы тяжести Земли постоянен, смотри рисунок 5.1 Наглядным представлением части такой эквипотенциальной поверхности является спокойная поверхность жидкости. Например, неколебаемая ветром поверхность воды в небольшом озере представляет собой эквипотенциальную поверхность. По этой причине эквипотенциальную поверхность еще называют уровенной поверхностью. Существует бесконечное множество эквипотенциальных (уровенных) поверхностей. Эти поверхности гладкие (дифференцируемые в любой точке), они не соприкасаются и не пересекаются друг с другом. В общем случае эти поверхности не параллельны, смотри рисунок 5.1. Силовая линия — это кривая, которая в каждой своей точке перпендикулярна уро-венным поверхностям, смотри рисунок 5.1. Вектор силы тяжести в любой точке направлен по касательной к силовой линии примерно в направлении центра масс Земли. Направление вектора силы тяжести называют также направлением отвесной линии. Именно это направление занимает подвешенный отвес. И именно это положение занимает ось вращения алидады теодолита, установленного (и нивелированного) на пункте.
При перемещении от одной точки эквипотенциальной поверхности к другой точке этой поверхности вектор силы тяжести изменяется по направлению и по модулю. Плоскость, касательную к эквипотенциальной поверхности в данном пункте, называют плоскостью астрономического горизонта. Направление вдоль отвесной линии вверх называют направлением в зенит пункта. Направление вдоль отвесной линии вниз называют направлением в надир пункта.