

Определение координат узловых точек эквидистанты
Определение узловых точек эквидистанты дано на примере контура (рисунок 13).
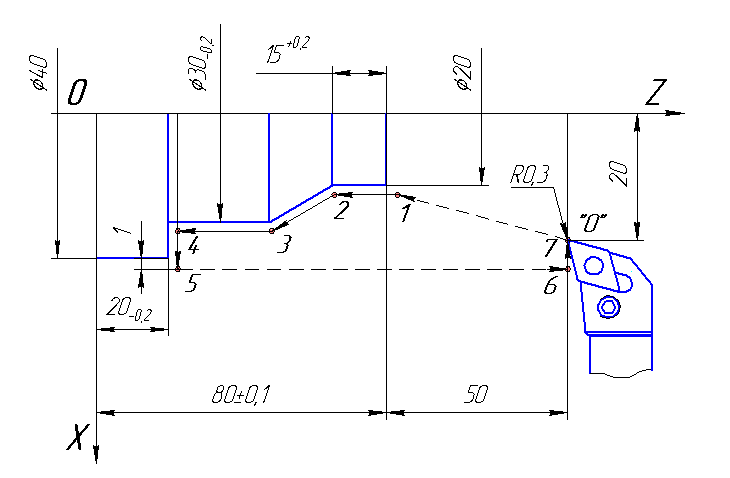
Рисунок 13 Траектория движения инструмента при обработке контура
детали
В выбранной системе координат, учитывая радиус при вершине резца определяем значение координат узловых точек.
Точка «0» имеет следующие координаты: по оси ОХ ( 40 ), т.к. значения по оси ОХ задаются на диаметр, а расстояние от оси до точки «0» - 20 мм., по оси OZ ( 130 )
Точка 1 - по оси ОХ ( 20,6 ), по оси ОZ ( 82 ) т.к. подвод инструмента составляет 1 … 2 мм.
Точка 2 - по оси ОХ ( 20,6 ), по оси ОZ ( 80-15=65 )
Точка 3 - по оси ОХ ( 30,6 ), по оси ОZ ( 80-15-8,66=56,34 ) рисунок 14
![]()
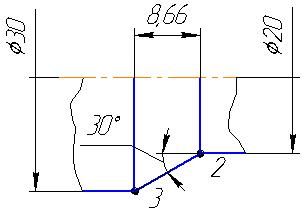
Рисунок 14 К расчету координаты узловой точки 3
Результаты определения значений координат узловых точек, следует отображать в таблице 1, в графах «координаты». В качестве примера, в таблице 1 даны координаты узловых точек эквидистанты (рисунок 13).
Таблица 1 Значения координат узловых точек эквидистанты и их приращений
Узловая точка |
Координаты, мм |
Приращения, мм |
||
X |
Z |
X |
Z |
|
0 |
40 |
130 |
- |
- |
1 |
20,6 |
82 |
-19,4 |
-48 |
2 |
20,6 |
65 |
0 |
-17 |
3 |
30,6 |
56,34 |
10 |
-8,66 |
4 |
30,6 |
20,1 |
0 |
-36,24 |
5 |
42 |
20,1 |
11,4 |
0 |
6 |
42 |
130 |
0 |
109,9 |
7 |
40 |
130 |
-2 |
0 |
Определение приращений координат узловых точек эквидистанты
Определение приращений координат узловых точек эквидистанты, выполняют, начиная с нулевой точки для рассматриваемого инструмента и кончая этой же точкой. При этом используют данные таблицы 1. В эту же таблицу следует записывать и величины приращений координат (со своим знаком), выраженные в мм. Пример определения приращений координат узловых точек эквидистанты (рисунок 13) приведен в таблице 1.
Приращения координат определяются по формулам:
![]() ,
,
![]()
при i = 1 n, где n – число узловых точек эквидистанты.
Обязательным условием определения приращений является, равенство нулю их сумм по всем осям координат:
 ,
,
 .
.
4 Компоновка кадров уп
Полученных в п.2 настоящей методики данных достаточно для компоновки кадров УП. Не хватает только значений режимов резания на каждом элементе обрабатываемого контура.
4.1 Структура кадров уп
Структуру кадра УП в общем, виде можно представить следующим образом:
1 - 2 - 3 - 4 - 5 - 6 .
где: 1 – номер кадра;
2 – подготовительная функция;
3 – перемещение по осям координат;
4 – подача;
5 – частота вращения шпинделя;
6 – вспомогательная функция.
Следует помнить, что любой кадр всегда начинается со своего порядкового номера в УП. Этот номер всегда трёхзначный, от 000 до 999. Опыт показывает, что этого количества кадров вполне достаточно для написания программ обработки весьма сложных контуров.
Однако наличие в кадре всех его элементов совсем не обязательно. Так, кадр может состоять только из номера и одной вспомогательной функции или кадр может содержать только одно перемещение.