

3.2. Определение ускорений методом построения планов ускорений
1. Механизм I класса – кривошип О А связан со стойкой вращательной парой и равномерно вращается вокруг центра О (рис. 1).
– Угловое ускорения кривошипа: так как дано ω1 = const, то
![]()
– Ускорение точки А определяем, рассмотрев вращение кривошипа
![]()
Модули
(11)![]()
2. Шатуны AВ и ВС совершают плоскопараллельное движение. У каждого шатуна известна скорость точки А. Принимая точку А. за полюс, запишем векторные уравнения для определения ускорения точек В и С
(12)
(13)
Модули :

IV. Силовой расчет
ЦЕЛЬ: определение усилий (реакций) в кинематических парах и уравновешивающей силы (уравновешивающего момента). Силовой расчет проводится кинетостатическим методом.
4.1. Кинетостатический метод силового расчета
Кинетостатический метод определения сил основан на принципе Даламбера, согласно которому, если в любой момент времени, кроме фактически действующих активных сил и сил реакций, ко всем точкам системы приложить силы инерции, то система будет уравновешена и к ней применимы уравнения равновесия статики. Обозначим:
Fe - внешняя сила;
ФSi. - главный вектор сил инерции r-того звена, приведенный к центру масс Si этого звена;
![]() - главный момент
(алгебраический) сил инерции i-того
звена относительно оси, проходящей
через центр масс Si
этого звена;
- главный момент
(алгебраический) сил инерции i-того
звена относительно оси, проходящей
через центр масс Si
этого звена;
![]() - момент внешней
силы относительно оси, проходящей через
центр масс Si
звена, на которое действует сила.
- момент внешней
силы относительно оси, проходящей через
центр масс Si
звена, на которое действует сила.
![]() - момент главного
вектора сил инерции /-того звена,
относительно оси, проходящей через
центр масс этого звена
- момент главного
вектора сил инерции /-того звена,
относительно оси, проходящей через
центр масс этого звена
На плоский механизм действует плоская система сил, и для нее уравнения кинетостатического равновесия имеют вид
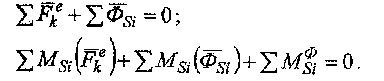
Силовой расчет кинетостатическим методом можно проводить графическим или аналитическим способом.
В данной работе рассматривается выполнение расчета графическим способом, как наиболее наглядным и доступным для студентов ИДО,
4.2. Внешние силы, действующие на механизм
4.2.1. Определение масс поршней и шатунов
Масса поршней и шатунов определяются по рекомендациям, применяемым в автотракторной промышленности, через площадь поршня Fn [см2].
Масса поршней
![]() (4)
(4)
Масса шатунов
Площадь поршня определяется по формуле
![]()
где Dn - диаметр поршня в [см].
4.2.2. Определение моментов инерции шатунов
Моменты инерции шатунов IS2 =IS4 относительно центров масс определяются по формуле, полученной из механики по .известной теореме Гюйгенса-Штейнера, относительно параллельных осей:
 ,
[кгм2] (5)
,
[кгм2] (5)
g - ускорение силы тяжести в [м/с2];
l=lAB=lAC длина шатунов в [м];
m2=m4 - массы шатунов в [кг].
4.2.3. Силы, действующие на поршни
Сила, действующая на поршень, определяется по формуле
![]()
р. -задано, Fn - подсчитано в 4.1.1.
4.2.4. Силы тяжести звеньев
Силы тяжести поршней и шатунов
![]()
Сила тяжести кривошипа, массой которого пренебрегаем, G1=0
4.2.5. Силы реакции (усилия) во внешних кинематических парах
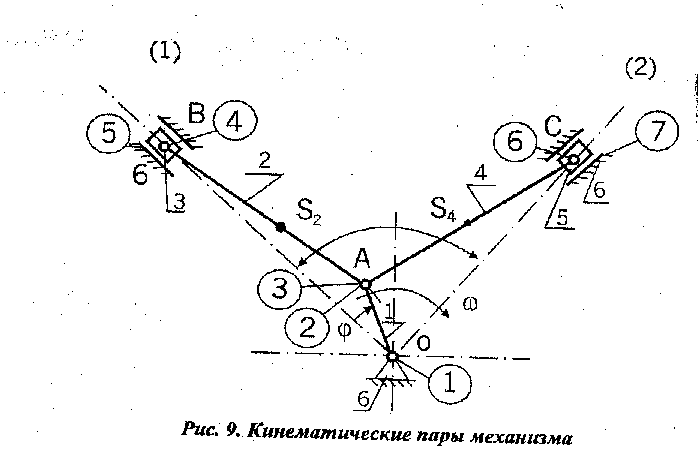
Кинематические пары механизма и внешние и внутренние обозначены цифрами в кружочке на рис. 9.
Силы реакции (усилия) в кинематических нарах раскладываем на составляющие: вдоль стержня - Fn и перпендикулярно к стержню звена F. Тогда имеем
![]() - в шарнирной
кинематической паре 1 (в шарнире 0);
- в шарнирной
кинематической паре 1 (в шарнире 0);
![]() в поступательной
кинематической паре 5;
в поступательной
кинематической паре 5;
![]() в поступательной
кинематической паре 7.
в поступательной
кинематической паре 7.