

3. Выбираем V - масштаб построения плана скоростей.
Пусть вектору скорости vA соответствует отрезок ра, где точка р — начало построения плана скоростей; р - полюс плана скоростей.
Тогда масштаб построения плана скоростей (масштаб скоростей)
(9)
При выполнении курсового проекта отрезок ра на плане скоростей следует выбирать в пределах 80 - 120 мм.
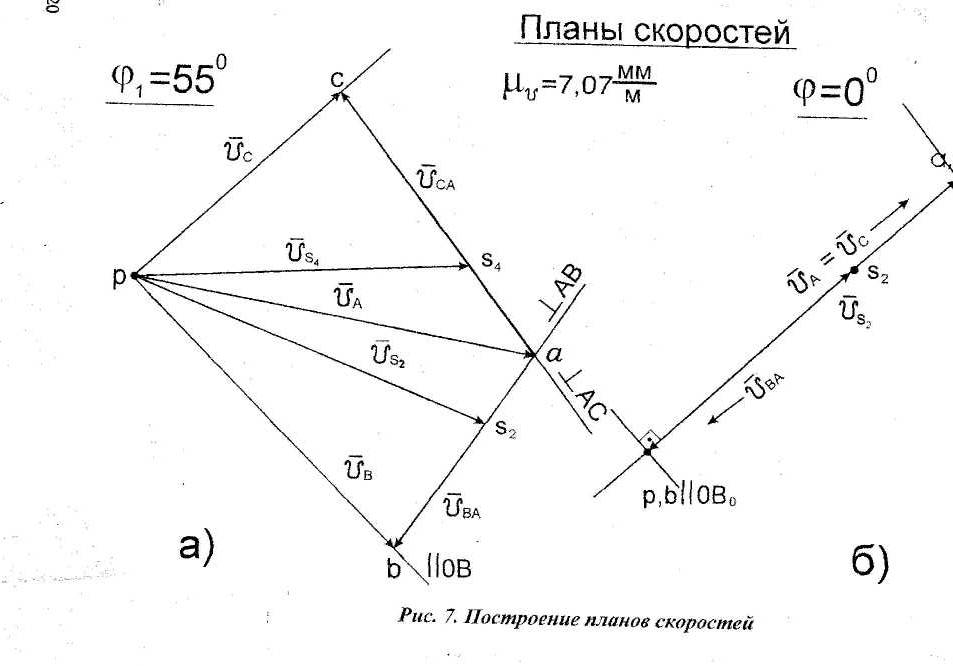
План скоростей при φ= 55°
4. Строим план скоростей для φ=55° (рис. 7а) по векторным уравнениям (7) и (8)
— выбираем полю р
— отложим от полюса р отрезок ра в направлении скорости V А
из точки а плана скоростей проводим прямую, перпендикулярную к АВ в обе стороны от точки а;
из полюса р плана скоростей проводим прямую, параллельную ОВ до пересечения с прямой, проведенной из точки а;
обозначим точку пересечения через b;
расставим стрелки векторов в соответствии с векторнымуравнением (7):
отрезок ab определяет скорость VВА;
отрезок pb определяет скорость VB.
из точки а плана скоростей проводим прямую, перпендикулярную к АС в обе стороны от точки а.
из полюса р плана скоростей проводим прямую, параллельную ОС до пересечения с прямой, проведенной из точки а;
обозначим точку пересечения через с;
расставим стрелки векторов в соответствии с векторным уравнением (8):
отрезок ас определяет скорость VCA; отрезок рс определяет скорость VC
5. Замеряем отрезки на плане скоростей и вычисляем модули неизвестных скоростей
6. Определим скорости центров масс поршней и шатунов
а) Скорости центров масс поршней равны скоростям точек В и С,
![]()
б) Для определения скоростей центров масс шатунов на плане скоростей необходимо показать точки s2,S4, соответствующие центрам масс Sг, S4 шатунов на схеме механизма.
— С этой целью воспользуемся теоремой подобия, согласно которой всякая жесткая фигура на схеме механизма имеет себе подобную на плане скоростей и плане ускорений при том же направлении обхода контура. Следовательно, положения точек на плане скоростей или ускорений можно определять из пропорции соответствующих отрезков. В исходных данных заданы отношения, определяющие положения центров масс. Исходя из данных, по теореме подобия можно записать следующие пропорции
Отсюда получаем отрезки
Откладываем отрезки as2 и as4 на плане скоростей (рис.7, а). Получим точки s2 и s4.
Соединим с полюсом р точки S2, s4 на плане скоростей, получим отрезки ps2 и ps4, изображающие соответственно скорости центров масс шатунов Vs2 , Vs4 в масштабе μ.
— Для определения численных значении скоростей центров масс необходимо измерить соответствующие отрезки на плане скоростей и разделить на масштаб μ. Получим для φ== 55°.
7. Перенесем с плана скоростей (рис.7, а) на схему механизма (рис. 5) векторы, изображающие скорости VB и VBA; VC и VCA.
![]()
Направления берутся с плана скоростей.
8. Определим угловые скорости шатунов.
Модули угловых скоростей шатунов, совершающих плоскопараллельное движение, вычисляются по формулам
Подставляя найденные в п.5 значения скоростей, получаем
(10)
Направлены (рис. 5): ., ,.
- угловая скорость ω2 в сторону скорости VВА, если на вектор VВ4 смотреть с полюса А;
- угловая скорость ω4 в сторону скорости VCA, если на вектор VCA смотреть с полюса А.