

4.5.2. Силовой расчет механизма I класса.
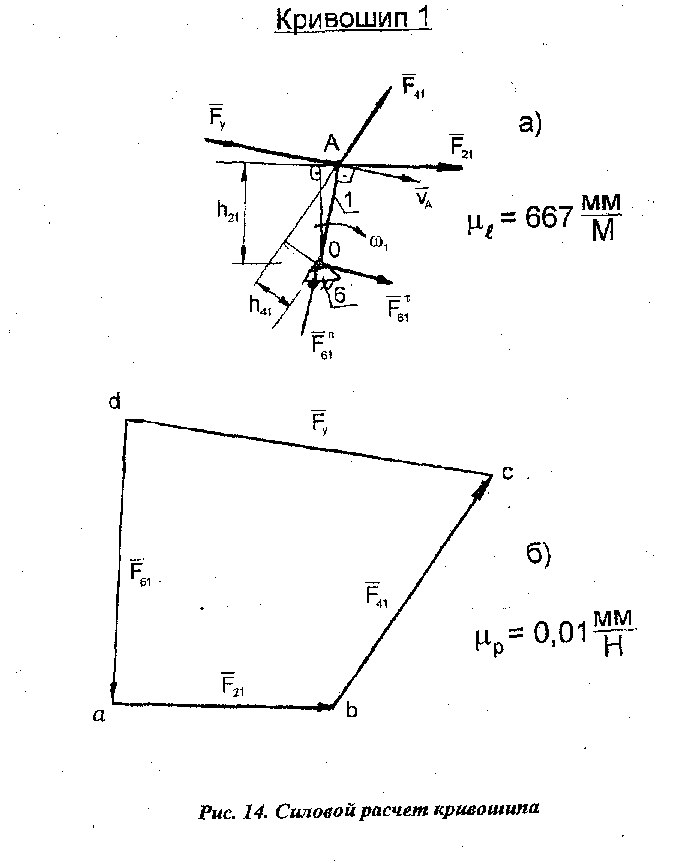
1. Изобразим кривошип в том же масштабе длин на рис. 14, а.
2. Покажем силы, действующие на кривошип.
При установившемся режиме работы на кривошип в нашем примере действуют следующие силы:
F21 – сила со стороны шатуна 2, направленная противоположно силе F12, найденной при расчете диады 2-3.
F61 - сила со стороны стойки. Неизвестная ни по величине, ни по направлению. Покажем ее произвольно.
Силу тяжести, которую ввиду малости не учитываем;
3. Запишем два уравнения кинетостатического равновесия
4. Найдем уравновешивающую силу.
Составим 1-ое уравнение - уравнение суммы моментов сил относительно точки О.
отсюда
![]()
5. Находим полную реакцию со стороны стойки.
Составим 2-ое уравнение – векторную сумму сил.
На рис. 14, а сила F61 представлена в виде суммы
![]()
6. Неизвестная сила F61 находится путем построения силового многоугольника.
Векторньй многоугольник строим в масштабе µf = 0,01 мм/Н
7, Отроим векторный многоугольник сил на рис. 14, б:
– выбираем точку а;
– из точки а откладываем отрезок аb в направлении силы F21 на рис. 14, а;
– из точки b откладываем отрезок bс в направлении уравновешивающей силы Fy ;
– отрезок, соответствующий неизвестной силе F61 , согласно векторному уравнению должен из точки d придти в точку а (чтобы многоугольник сил был замкнут). - расставляем стрелки векторов сил.
8. Замыкающий вектор da определяет искомую силу F61.
Найдем модуль силы F61
замеряем da, вычисляем
![]()
4.6. Определение уравновешивающей силы с помощью теоремы н.Е. Жуковского о "жестком рычаге"
Теорема Н.Е. Жуковского о "жестком рычаге" позволяет определять уравновешивающую силу без последовательного силового расчета, но при этом теорема не дает возможности "определить реакции в кинематических парах.
ТЕОРЕМА: Если а соответствующие точки повернутого на 90° плана скоростей перенести все внешние силы, действующие на механизм, силы инерции, уравновешивающую силу, то план скоростей, рассматриваемый как жесткий рычаг относительно полюса p, будет находится в равновесии, т.е. сумма моментов всех сил относительно полюса равна нулю.
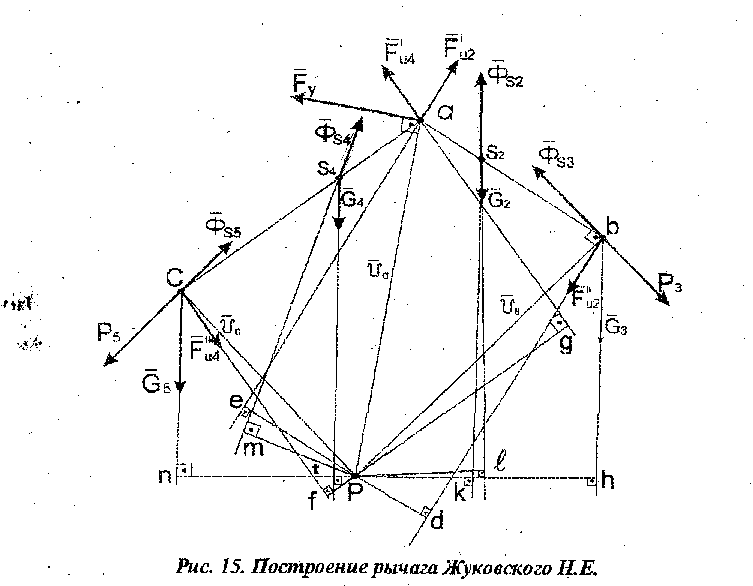
Построение рычага Н.Е. Жуковского для рассматриваемого положения (φ=55° производится в следующем порядке)
1. Строим повернутый на 90° план скоростей (рычаг Н.Е. Жуковского). Поворачивать план скоростей можно как по ходу часовой стрелки, так и против. Масштаб построения может быть произвольным. Удобно воспользоваться уже построенным на рис, 8 а планом. Поворот этого плана произведем по ходу часовой стрелки вокруг полюса р. Стрелки, показывающие направления векторов скоростей на рычаге Н.Е. Жуковского, не ставятся.
2. Покажем на рычаге Н.Е. Жуковского точки, соответствующие точкам приложения сил на схеме механизма (а, b, с, s2, s4),
3. Перенесем в эти точки силы давления в цилиндрах P3, P5, силы тяжести G2, G3, G4, G5 , силы инерции ФS2, ФS3, ФS4, ФS5.. В точке а приложим уравновешивающую силу Fy.
4. Моменты от сил
инерции
![]() представим в виде пар сил
представим в виде пар сил
![]() приложенных
соответственно в точках (a,b),(a,c).
приложенных
соответственно в точках (a,b),(a,c).
5. Перенесем пары сил на рычаг Н.Е. Жуковского.
6. Покажем на рычаге Н.Е. Жуковского плечо каждой силы относительно полюса/; плана. Для этого из полюса р проведем перпендикуляры на направление каждой силы.
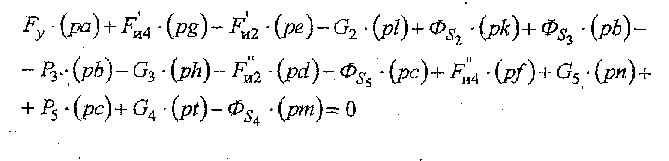
7. Составим уравнение моментов всех сил относительно полюса
![]()

Отсюда
Замеряем отрезки на чертеже и рассчитываем значение уравновешивающей силы, если оно получилось положительным значит мы выбрали правильное направление, если отрицательным – меняем направление на противоположное