

1.3. Структурные группы механизма
Рычажный механизм состоит из механизма 1-го класса и двухпроводковых групп (диад).
Структурный анализ начинают с дальней диады. 1. ДИАДА 4 — 5 (рис.2) - шатун АС с ползуном В — представляет собой двухпроводковую группу второго вида, т.е. диаду с двумя враща-
тельнымии 3 и 6 и одной поступательной (конечной) парами.

Число подвижных звеньев n=2.
Число кинематических пар с учетом незадействованной (з), но учитываемой при определении степени подвижности диады
![]()
Степень подвижности диады
![]()
2. ДИАДА 2 — 3 (рис.3) — шатун АВ и ползуном В представляет собой двухповодковую группу второго вида, т.е. диаду с двумя (2), (4) вращательными и одной (5) поступательной (конечной) парами.
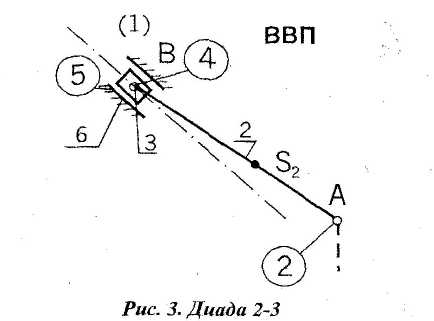
Число подвижных звеньев п =2.
Число кинематических пар с учетом незадействованной 2, но учитываемой при определении степени подвижности диады
![]()
![]()
3. МЕХАНИЗМ 1 КЛАССА (рис.4) - ведущее звено 1 (кривошип ОА), соединенное шарниром О с неподвижной стойкой 6.

Число подвижных звеньев n=1.
Кинематические пары в точке ,4 учтены в диадах 4 — 5 и 2 — 3.
Число кинематических пар р5= 1, р4= 0.
Степень подвижности механизма 1 -го класса
![]()
П. Проектирование механизма
2.1. Определение размеров кривошипа и шатунов
Радиус кривошипа 104 —r определяется через ход поршня Н по формуле
![]() (2)
(2)
Длины шатунов l=lAB=lAC определяются через радиус кривошипа и параметр
2.2. Построение кинематической схемы механизма а. Кинематическая схема при заданном положении
ведущего звена 1=550
Выбираем масштаб длин 1
Пусть радиусу кривошипа l0А соответствует на чертеже отрезок О А. Тогда масштаб построения будет равен
![]()
При выполнении курсового проекта масштаб Hl следует выбирать таким, чтобы длинам шатунов соответствовали на чертеже отрезки длиной 100 - 200 мм.
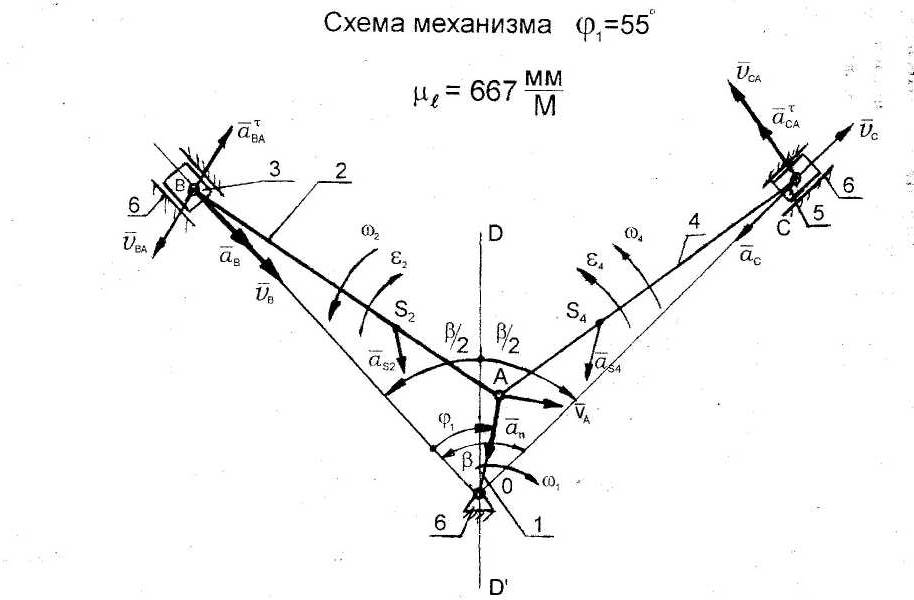
Вычерчиваем механизм (рие.5)
Проведем вертикальную линию DD' - ось симметрии механизма.
Из произвольной точки О, лежащей на этой линии, принимаемой за центр вращения кривошипа, проведем две прямые линии под углом
![]()
к вертикальной линии
Получим оси цилиндров ОB и ОС.
От оси ОB левого цилиндра отложим угол

На стороне этого угла отложим отрезок ОА изображающий положение кривошипа
Из точки А радиусом AB=AC=120 мм делаем засечки на осях цилиндров. Получим точки В и С, определяющие положения поршней при
Изобразим поршни в виде ползунов в произвольном масштабе
Соединим точки В и С с точкой А
Отложим от точки А отрезки АS2 и АS4 на линиях АВ и АС
III. Кинематический расчет механизмов.
Цель: Найти сроки и ускорения центров масс и угловые скорости ускорения звеньев механизма.
3.1. Определение скоростей методом построения планов скоростей
I. МЕХАНИЗМ I КЛАССА - кривошип ОА связан со стойкой вращательной парой и совершает равномерное вращение вокруг центра О (рис. 4).
— угловая скорость кривошипа ОА определяется через частоту вращения n [об/мин] по формуле
![]()
Модуль определяется по формуле
![]()
Направлен вектор VA ┴ ОА в сторону угловой скорости, ω1 (рис.5).
2. ШАТУНЫ АВ и ВС совершают плоскопараллельное движение. У каждого шатуна известна скорость точки А. Примем её за полюс и напишем векторные уравнения для определения скоростей vB и vc точек В и С шатунов
(7)
(8)
где направления:
vВА - вектор скорости точки В относительно точки А, перпендикулярен шатуну АВ.
vСА - вектор скорости точки С относительно точки А, перпендикулярен шатуну АС.
vВ - вектор абсолютной скорости точки В, направлен по линии ОВ;
vс - вектор абсолютной скорости точки С, направлен по линии ОС;
В уравнениях (7) и (8) вектор vA подчеркнут двумя чертами, так как известен по величине и по направлению. Остальные векторы подчеркнуты одной чертой, так как известны только по направлению.