

4 Орграф и матрица инциденций моделируемой системы
На рисунке 5 приведен
орграф, соответствующий динамической
модели подвески автомобиля с учетом
модели виброзащиты человека. Узлы
орграфа 2 и 4 отображают сосредоточенные
массы
и
,
узлы 1 и 3 – сосредоточенные массы
![]() и
и
![]() ,
а узел 5 – сосредоточенную массу
.
,
а узел 5 – сосредоточенную массу
.
В таблице 2 приведена матрица инциденций, а в таблице 3 – матрица трансформаторных элементов. В этих матрицах диссипативные элементы не отражены, так как их инциденторы полностью совпадают с инциденторами упругих элементов.
Рисунок 5 – Орграф динамической модели исследования вибронагруженности подвески автомобиля и водителя
Таблица 2 – Матрица инциденций Таблица 3 – Матрица трансформаторных элементов
Узел |
Ветвь |
|
Узел |
Ветвь |
|
|
|
|
|||
1 |
0 0 |
1 –1 0 0 0 |
|
1 |
0 0 0 0 0 |
2 |
0 0 |
0 1 0 0 –1 |
|
2 |
0 0 0 0 1 |
3 |
0 0 |
0 0 1 –1 0 |
|
3 |
0 0 0 0 0 |
4 |
0 0 |
0 0 0 1 –1 |
|
4 |
0 0 0 0 2 |
5 |
0 0 |
0 0 0 0 1 |
|
5 |
0 0 0 0 0 |
1* |
1 0 |
–1 0 0 0 0 |
|
|
|
2* |
0 1 |
0 0 –1 0 0 |
|
|
|
5 Математическая модель подвески автомобиля
Используя матрицы инциденций и трансформаторных элементов, на основе структурно-матричного метода получают топологические и компонентные уравнения, составляющие математическую модель динамической системы подвески автомобиля:
![]() (27)
(27)
![]() (28)
(28)
где
![]() – скорость изменения вертикальной
ординаты
– скорость изменения вертикальной
ординаты
![]() микропрофиля опорной поверхности, по
которой катится i-е
колесо автомобиля, м/с:
микропрофиля опорной поверхности, по
которой катится i-е
колесо автомобиля, м/с:
![]() .
.
6 Функции внешних воздействий
Внешние воздействия
на колеса автомобиля при его движении
создают неровности опорной поверхности
дороги. В общем случае изменение ординат
микропрофиля
![]() описывается случайной функцией. На
начальных стадиях проектирования
подвески автомобиля используют более
простые детерминированные тестовые
функции воздействий. Наиболее часто
рассматривают движение по гармоническому
микропрофилю и преодоление типовых
препятствий. Одно из таких препятствий
представлено на рисунке 6.
описывается случайной функцией. На
начальных стадиях проектирования
подвески автомобиля используют более
простые детерминированные тестовые
функции воздействий. Наиболее часто
рассматривают движение по гармоническому
микропрофилю и преодоление типовых
препятствий. Одно из таких препятствий
представлено на рисунке 6.
Так как задние
колеса двухосного автомобиля катятся
по следу передних, то аргументом функции
ординат микропрофиля для передних колес
принимают время
![]() ,
а для задних колес учитывают его смещение
на величину
,
а для задних колес учитывают его смещение
на величину
![]() ,
соответствующую времени перемещения
автомобиля на расстояние
,
равное базе автомобиля. Испытания
автомобиля на плавность хода осуществляют
при постоянной скорости движения
,
соответствующую времени перемещения
автомобиля на расстояние
,
равное базе автомобиля. Испытания
автомобиля на плавность хода осуществляют
при постоянной скорости движения
![]() ,
поэтому
,
поэтому
![]() .
(29)
.
(29)
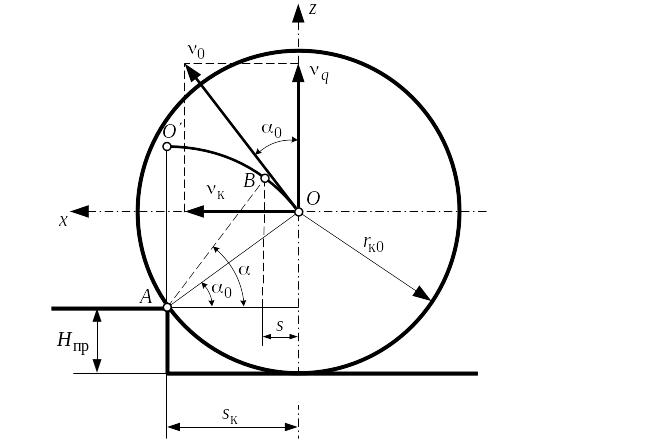
Рисунок 6 – Схема преодоления порогового препятствия
Предположим, что
при наезде колеса на препятствие
расстояние от точки
![]() до центра колеса
до центра колеса
![]() вследствие его деформации изменяется
на сравнительно небольшую величину,
поэтому примем его равным радиусу
качения ведомого колеса
вследствие его деформации изменяется
на сравнительно небольшую величину,
поэтому примем его равным радиусу
качения ведомого колеса
![]() .
Тогда перемещение колеса
.
Тогда перемещение колеса
![]() ,
на котором происходит его подъем на
выступ порогового препятствия, определим
по формулам:
,
на котором происходит его подъем на
выступ порогового препятствия, определим
по формулам:
![]() ;
(30)
;
(30)
![]() ,
(31)
,
(31)
где
![]() – высота порогового препятствия, м.
– высота порогового препятствия, м.
Скорость подъема
центра колеса
![]() при наезде на препятствие определяется
по формуле
при наезде на препятствие определяется
по формуле
![]() ,
(32)
,
(32)
где
![]() – скорость центра колеса (принимается
равной скорости автомобиля
),
м/с;
– скорость центра колеса (принимается
равной скорости автомобиля
),
м/с;
![]() – угол поворота
колеса, изменяемый в процессе наезде
на препятствие, рад.
– угол поворота
колеса, изменяемый в процессе наезде
на препятствие, рад.
Значение угла
поворота передних колес
![]() вычисляется из выражения
вычисляется из выражения
 (33)
(33)
где
![]() – перемещение автомобиля, вычисляемое
по формуле
– перемещение автомобиля, вычисляемое
по формуле
![]() .
(34)
.
(34)
Значение угла
поворота задних колес
![]() при наезде на препятствие
при наезде на препятствие
 (35)
(35)
Изменения во
времени воздействий неровностей опорной
поверхности
![]() на передние и задние колеса в процессе
движения автомобиля вычисляются по
формуле (32), подставляя в нее значения
на передние и задние колеса в процессе
движения автомобиля вычисляются по
формуле (32), подставляя в нее значения
![]() ,
полученные по формулам (33) и (35).
,
полученные по формулам (33) и (35).
Гармонический микропрофиль опорной поверхности описывают косинусоидой (рисунок 6):
![]() ,
(36)
,
(36)
где
![]() – амплитуда высоты неровности, м;
– амплитуда высоты неровности, м;
![]() – длина волны
косинусоиды, м.
– длина волны
косинусоиды, м.
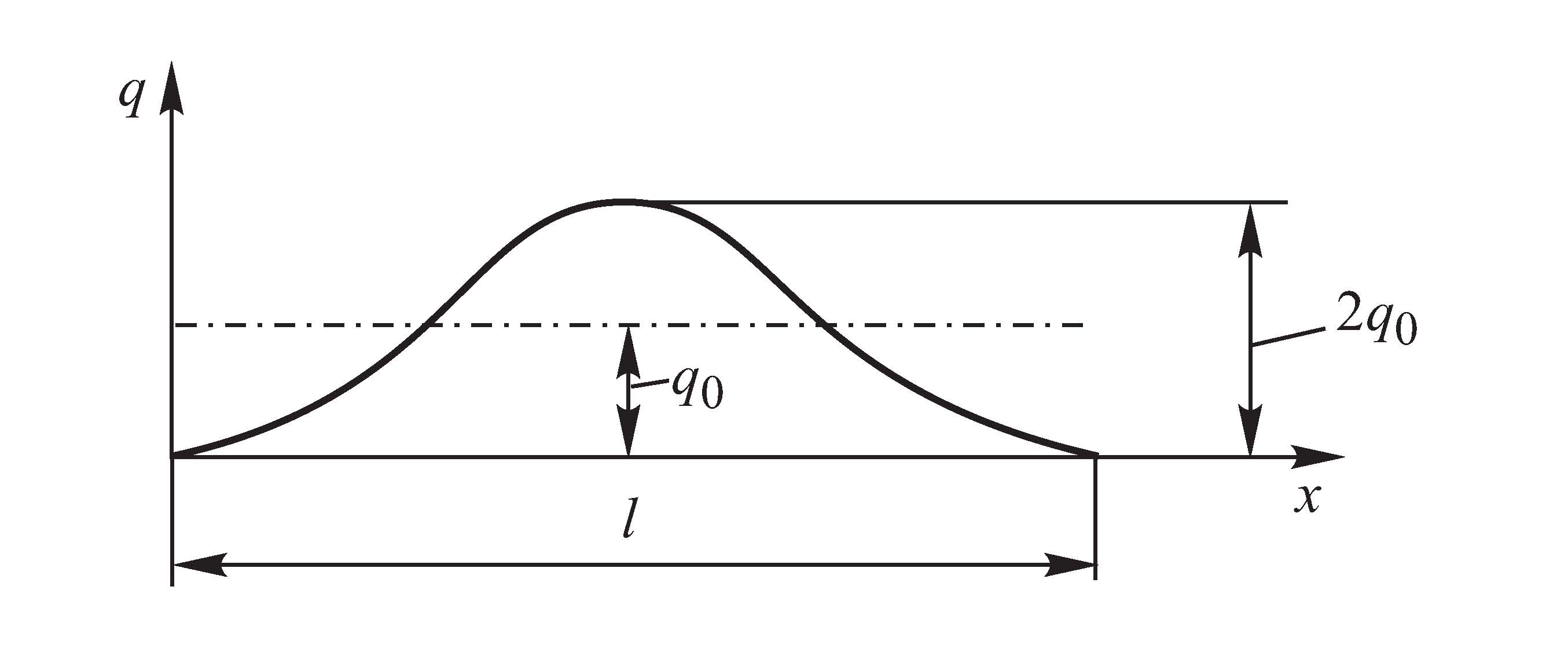
Рисунок 7 – Профиль косинусоидальной неровности опорной поверхности
Учитывая, что
![]() ,
выражение (36) приведем к виду:
,
выражение (36) приведем к виду:
![]() ,
(37)
,
(37)
где
![]() – частота воздействия гармонического
микропрофиля дороги на колеса автомобиля,
рад/с.
– частота воздействия гармонического
микропрофиля дороги на колеса автомобиля,
рад/с.
Значение зависит от скорости автомобиля и длины волны косинусоиды и вычисляется по формуле
![]() .
(38)
.
(38)
Воздействием
неровностей опорной поверхности на
колеса автомобиля в системе уравнений
(27) является скорость вертикального
перемещения колес
,
соответствующая производной функции
![]() по времени. Для передних колес получаем
по времени. Для передних колес получаем
![]() ,
(39)
,
(39)
а для задних колес –
![]() (40)
(40)
Время вычисляется по формуле (29).