

3 Определение параметров элементов динамической модели подвески
Параметры подрессоренных и неподрессоренных масс подвески определяются по формулам:
![]() ;
(2)
;
(2)
![]() ;
(3)
;
(3)
![]() ,
(4)
,
(4)
где
![]() – часть полной массы автомобиля
– часть полной массы автомобиля
![]() ,
нагружающая i-й
мост автомобиля, кг;
,
нагружающая i-й
мост автомобиля, кг;
![]() – то же снаряженной
массы автомобиля
– то же снаряженной
массы автомобиля
![]() ,
кг;
,
кг;
![]() – подрессоренная
масса автомобиля с полной нагрузкой,
отнесенная к i-му
мосту;
– подрессоренная
масса автомобиля с полной нагрузкой,
отнесенная к i-му
мосту;
![]() – подрессоренная
масса снаряженного автомобиля, отнесенная
к i-му
мосту;
– подрессоренная
масса снаряженного автомобиля, отнесенная
к i-му
мосту;
![]() – неподрессоренная
масса i-го
моста;
– неподрессоренная
масса i-го
моста;
![]() – коэффициент
распределения масс, равный отношению
подрессоренной массы к неподрессоренной
для автомобиля с полной нагрузкой.
– коэффициент
распределения масс, равный отношению
подрессоренной массы к неподрессоренной
для автомобиля с полной нагрузкой.
В таблице 1 приведены статистические данные по коэффициенту для двухосных автомобилей с полной нагрузкой и в снаряженном состоянии. В скобках указаны данные для легковых автомобилей с зависимой подвеской мостов.
Таблица 1 – Распределение подрессоренных и неподрессоренных масс автомобилей
Наименование |
Значение коэффициента
|
|
для автомобиля с полной нагрузкой |
для снаряженного автомобиля |
|
Передние колеса: – легковых – грузовых Задние колеса: – легковых – грузовых |
8–12 (4,5–7,0) 3,0–5,0
5,5–10,0 4,5–6,5 |
7–10 (4–6) 2,5–5,0
3,5–6,0 1,2–3,0 |
При отсутствии данных по параметрам упругих элементов подвески значения их коэффициентов жесткости определяют на основе одномассовой парциальной системы, приведенной на рисунке 3.
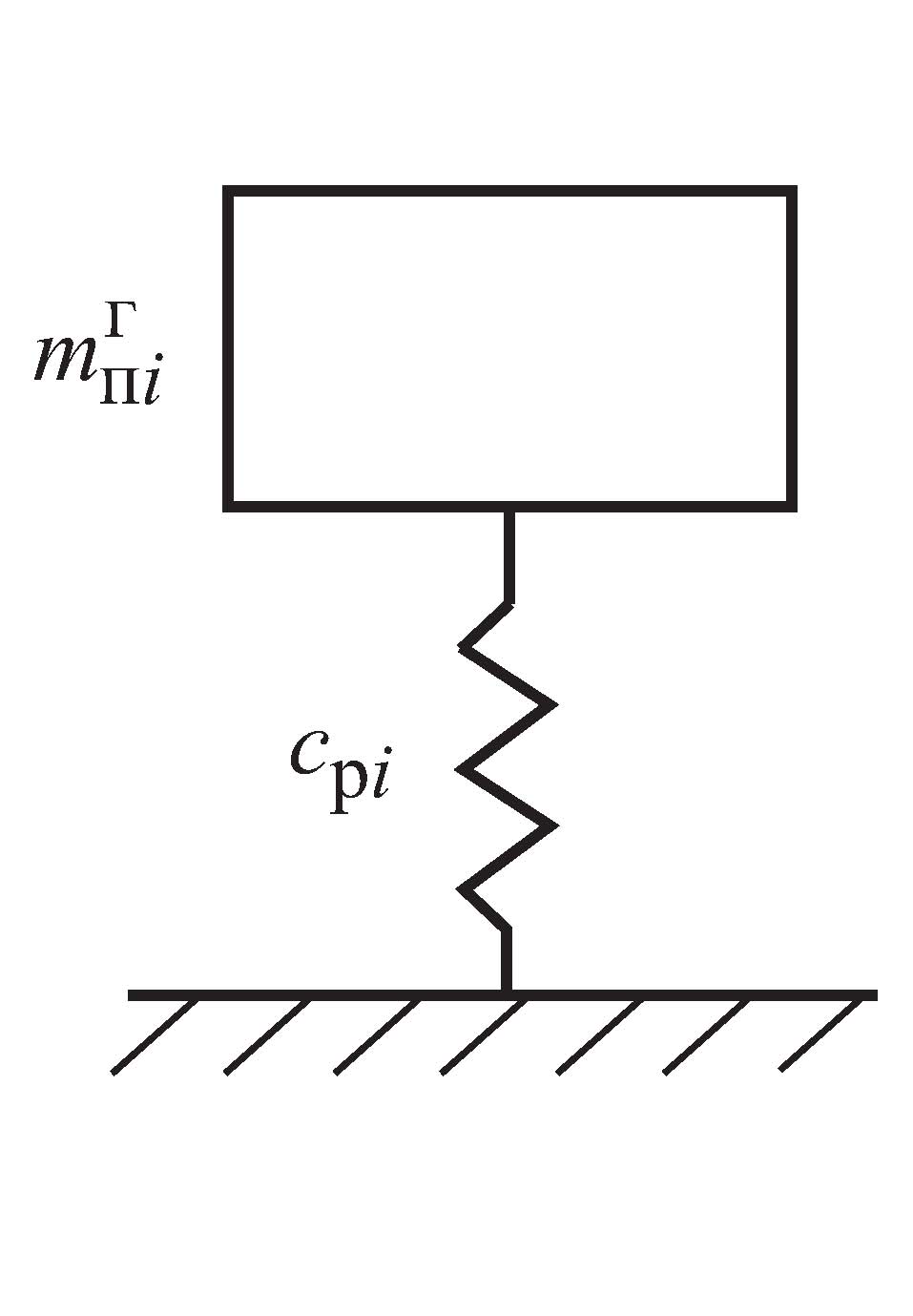
Рисунок 3 – Динамическая модель
парциальной системы для определения
![]()
При этом используется подрессоренная масса автомобиля при полной его нагрузке . Согласно приведенной схеме собственная парциальная частота массы вычисляется по формуле
 ,
(5)
,
(5)
где
![]() – собственная парциальная частота,
рад/с.
– собственная парциальная частота,
рад/с.
Для определения
![]() необходимо выбрать
,
принимая во внимание рекомендуемый
диапазон частот, обеспечивающий
комфортные условия для работы человека.
Для легковых автомобилей диапазон
комфортных частот находится в пределах
необходимо выбрать
,
принимая во внимание рекомендуемый
диапазон частот, обеспечивающий
комфортные условия для работы человека.
Для легковых автомобилей диапазон
комфортных частот находится в пределах
![]() Гц, а для грузовых –
Гц, а для грузовых –
![]() Гц. Для передней подвески рекомендуется
принимать значение
Гц. Для передней подвески рекомендуется
принимать значение
![]() меньше, чем для задней
меньше, чем для задней
![]() ,
в 1,05–1,15 раза. Круговая частота
связана с циклической частотой
,
в 1,05–1,15 раза. Круговая частота
связана с циклической частотой
![]() соотношением
соотношением
![]() .
(6)
.
(6)
В результате получаем выражение для определения коэффициента жесткости упругого элемента подвески:
![]() .
(7)
.
(7)
Значение характеризует суммарную жесткость левой и правой рессор i-го моста и измеряется в Н/м.
Подвеску заднего моста грузового автомобиля обычно выполняют с двумя рессорами – основной и дополнительной. Суммарный коэффициент жесткости этих рессор
![]() ,
(8)
,
(8)
где
![]() – коэффициент жесткости основной
рессоры, Н/м;
– коэффициент жесткости основной
рессоры, Н/м;
![]() – коэффициент
жесткости дополнительной рессоры, Н/м.
– коэффициент
жесткости дополнительной рессоры, Н/м.
Вначале определяют
![]() для полной массы
для полной массы
![]() :
:
![]() .
(9)
.
(9)
Значение
выбирают из интервала 1,2–1,8 Гц. В первом
приближении можно принять
![]() Гц. Затем определяют
для снаряженного автомобиля:
Гц. Затем определяют
для снаряженного автомобиля:
![]() .
(10)
.
(10)
Рекомендуется
принимать
![]() Гц. Значение
вычисляется по формуле
Гц. Значение
вычисляется по формуле
![]() .
(11)
.
(11)
При моделировании колебаний автомобиля полной массы принимают параметр рессоры , а для снаряженного автомобиля – .
Коэффициент
жесткости шины
![]() можно вычислить по формуле
можно вычислить по формуле
![]() ,
(12)
,
(12)
где
![]() – номинальная нагрузка на шину, Н;
– номинальная нагрузка на шину, Н;
![]() – свободный радиус
шины, м;
– свободный радиус
шины, м;
![]() – статический
радиус, м;
– статический
радиус, м;
![]() – статическая
деформация шины при нагрузке
,
м.
– статическая
деформация шины при нагрузке
,
м.
Исходные параметры
шины принимают из [4]. Значения коэффициентов
жесткости
![]() упругих элементов динамической модели
на рисунке 1 вычисляют с учетом количества
шин на каждом мосту автомобиля:
упругих элементов динамической модели
на рисунке 1 вычисляют с учетом количества
шин на каждом мосту автомобиля:
![]() ,
(13)
,
(13)
где
![]() – количество шин на i-ом
мосту.
– количество шин на i-ом
мосту.
При определении
коэффициентов демпфирования (сопротивления)
диссипативных элементов
![]() и
и
![]() используются парциальные системы,
приведенные на рисунке 4. Значения
вычисляют отдельно для автомобиля
полной массы
используются парциальные системы,
приведенные на рисунке 4. Значения
вычисляют отдельно для автомобиля
полной массы
![]() и снаряженного автомобиля
и снаряженного автомобиля
![]() .
.

Рисунок 4 – Динамические модели
парциальных систем для определения
![]()
Значения и определяются по формулам:
![]() ;
(14)
;
(14)
![]() ;
(15)
;
(15)
![]() ,
(16)
,
(16)
где
![]() ,
,
![]() – относительные коэффициенты затухания
колебаний, обусловленные соответственно
диссипативными элементами подвески и
шин;
– относительные коэффициенты затухания
колебаний, обусловленные соответственно
диссипативными элементами подвески и
шин;
![]() ,
,
![]() ,
,
![]() – собственные парциальные частоты
систем, рад/с;
– собственные парциальные частоты
систем, рад/с;
![]() ,
,
![]() – приведенная масса парциальной системы,
согласно рисунку 3, а,
кг.
– приведенная масса парциальной системы,
согласно рисунку 3, а,
кг.
Значения , , , , вычисляются по формулам:
 ;
(17)
;
(17)
 ;
(18)
;
(18)
 ;
(19)
;
(19)
 ;
(20)
;
(20)
![]() .
(21)
.
(21)
Для легковых
автомобилей принимают
![]() ,
для грузовых –
,
для грузовых –
![]() .
У автомобильных шин
.
У автомобильных шин
![]() .
.
При исследовании колебаний подрессоренных и неподрессоренных масс автомобиля достаточно использовать динамическую модель подвески, представленную на рисунке 1. Если же необходимо исследовать условия работы водителя или комфортность пассажиров, тогда ее необходимо дополнить моделью, приведенной на рисунке 2. В результате получим динамическую модель с пятью степенями свободы.
При моделировании
виброзащитной системы человека (см.
рисунок 2) принимают следующие значения
ее параметров: масса
![]() кг; коэффициент жесткости сиденья
легковых автомобилей
кг; коэффициент жесткости сиденья
легковых автомобилей
![]() Н/м, грузовых –
Н/м, грузовых –
![]() Н/м; относительный коэффициент затухания
Н/м; относительный коэффициент затухания
![]() .
Так как подрессоренная масса автомобиля
значительно больше массы
.
Так как подрессоренная масса автомобиля
значительно больше массы
![]() ,
то она не оказывает существенного
влияния на демпфирование колебаний
массы
.
Поэтому коэффициент демпфирования ее
колебаний можно определять по приближенной
формуле (без учета подрессоренной массы
автомобиля):
,
то она не оказывает существенного
влияния на демпфирование колебаний
массы
.
Поэтому коэффициент демпфирования ее
колебаний можно определять по приближенной
формуле (без учета подрессоренной массы
автомобиля):
![]() ,
(22)
,
(22)
где
![]() – парциальная частота колебаний массы
:
– парциальная частота колебаний массы
:
![]() .
(23)
.
(23)
Колебания массы
связаны с колебаниями подрессоренных
масс
![]() и
и
![]() .
Эта связь осуществляется посредством
безынерционного рычага
,
представляющего собой трансформаторный
элемент, преобразующий координаты
.
Эта связь осуществляется посредством
безынерционного рычага
,
представляющего собой трансформаторный
элемент, преобразующий координаты
![]() и
и
![]() точек A
и B
подрессоренных масс в вертикальное
перемещение точки E,
определяемое координатой
точек A
и B
подрессоренных масс в вертикальное
перемещение точки E,
определяемое координатой
![]() .
Соотношение между координатами
,
и
устанавливается выражением:
.
Соотношение между координатами
,
и
устанавливается выражением:
![]() ,
(24)
,
(24)
где
![]() – продольная координата точки E
в системе координат xyz
(см. рисунок 1).
– продольная координата точки E
в системе координат xyz
(см. рисунок 1).
Значение координаты подставляется в выражение (24) со своим знаком.
Продифференцируем выражение (24) по времени:
![]() ,
(24)
,
(24)
где
![]() ,
,
![]() ,
,
![]() – скорости точек E,
A,
B
соответственно.
– скорости точек E,
A,
B
соответственно.
Из этого выражения
можно определить передаточные числа
трансформаторных элементов
![]() и
и
![]() ,
преобразующих фазовые координаты
и
(скорости подрессоренных масс) в
координату
(скорость точки E):
,
преобразующих фазовые координаты
и
(скорости подрессоренных масс) в
координату
(скорость точки E):
![]() ;
(25)
;
(25)
![]() .
(26)
.
(26)
Согласно выражениям
(25) и (26) при расположении массы
над передним колесом автомобиля, когда
![]() ,
получаем
,
получаем
![]() ;
;
![]() .
Это означает, что в этом случае на
колебания массы
будет оказывать влияние только координата
подрессоренной массы
.
При этом следует принять вместо
некоторое достаточно большое значение
,
например,
.
Это означает, что в этом случае на
колебания массы
будет оказывать влияние только координата
подрессоренной массы
.
При этом следует принять вместо
некоторое достаточно большое значение
,
например,
![]() .
.