

3.5.2 Указания по выполнению задания д-5
[Один из общих принципов механики, называемый принципом Даламбера – Лагранжа, формулируется так: движение механической системы с идеальными связями под действием приложенных к ней активных сил происходит так, что в каждый момент времени сумма элементарных работ этих активных сил и сил инерции на любом возможном перемещении системы из рассматриваемого положения равна нулю.
Уравнение, дающее математическое выражение принципа Даламбера –Лагранжа, называется общим уравнением динамики:
![]() . (3.46)
. (3.46)
Преимущество общего уравнения динамики состоит в том, что в его формулировке отсутствуют силы реакций идеальных связей. Если не все связи идеальные, следует к активным силам добавить силы реакций, соответствующие неидеальным связям, например силы трения.
При решении задач с помощью общего уравнения динамики для выбранной механической системы с одной степенью свободы рекомендуется придерживаться следующей последовательности:
1) показать на рисунке активные силы и силы реакций, соответствующие неидеальным связям;
2) приложить к телам системы силы инерции;
3) дать возможное перемещение одной из точек системы и выразить возможные перемещения точек приложения всех сил через это перемещение;
4) вычислить сумму возможных работ всех сил, указанных в первых двух пунктах, и составить общее уравнение динамики;
5) найти искомую величину, решив составленное уравнение.
3.5.3 Примеры выполнения задания д-5
Пример Д-5.1. Используя общее уравнение динамики, решить задачу для схемы, показанной на рис. 3.126.
Дано: Р1 = 6Р, Р2 = 4Р, Р3 = 2Р, Р4 = 2Р, Р5 = P, F = 16Р.
Найти: а1 – ускорение груза 1.
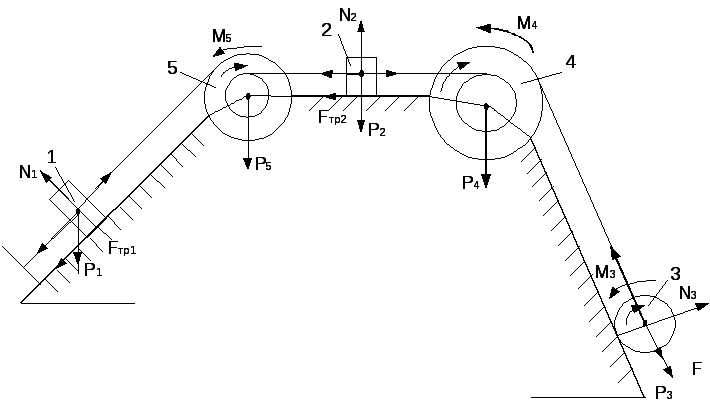
Рис. 3.126. Расчетная схема к примеру Д-5.1
Решение: применим для решения задачи общее уравнение динамики. Связи для грузов 1 и 2 неидеальные, так как надо учитывать трение.
1.
Показываем на рисунке активные силы
![]() и силу
и силу
![]() .
Для грузов 1
и 2
показываем реакции шероховатых
поверхностей
.
Для грузов 1
и 2
показываем реакции шероховатых
поверхностей
![]() и
и![]() ,
,![]() (неидеальные связи). Задавшись направлением
ускорения груза
(неидеальные связи). Задавшись направлением
ускорения груза![]() ,
показываем
силы инерции поступательно движущихся
грузов 1 и
2
–
,
показываем
силы инерции поступательно движущихся
грузов 1 и
2
–
![]() ,
пары сил инерции
для вращающихся шкивов 4
и 5
–
,
пары сил инерции
для вращающихся шкивов 4
и 5
–
![]() ,
а также главный
вектор
,
а также главный
вектор
![]() и главный момент
и главный момент![]() сил инерции тела3,
совершающего плоскопараллельное
движение, величины которых равны:
сил инерции тела3,
совершающего плоскопараллельное
движение, величины которых равны:
![]()
![]()
Так как массы шкивов 4 и 5 распределены по их внешним ободам, а тело 3 – однородный цилиндр, то
![]()
Силы
трения для тел 1
и 2
определяются через нормальные реакции,
т.е.
![]() ,
а
,
а![]() и
и![]() равны величинам составляющих сил
тяжести, перпендикулярным к плоскостям
движения:
равны величинам составляющих сил
тяжести, перпендикулярным к плоскостям
движения:![]() ,
,![]() .
Поэтому
.
Поэтому![]() .
.
2. Сообщая системе возможное перемещение и составляя уравнение работ на данном перемещении (3.43), будем иметь:

Все
перемещения выразим через возможное
перемещение груза 1,
т.е. через
![]() .
.
Воспользуемся тем, что в случае стационарных связей возможные перемещения связаны аналогично скоростям и ускорениям:
 (3.45)
(3.45)
Для тела 3 учтено, что оно совершает мгновенно вращательное движение вокруг МЦС, который находится в точке соприкосновения с плоскостью движения. Подставив (3.45) в уравнение (3.44) с учетом выражений для моментов и сил инерции, получим:
 (3.46)
(3.46)
Входящие
в это выражение ускорения выразим через
искомое ускорение
![]() :
:
![]()
![]() ;
;
![]()
Соотношения
между ускорениями такие же, как и между
скоростями этих же точек или тел.
Учитывая, что
в выражении
(3.46)
![]() приравниваем
к нулю выражение в скобках. После
преобразования будем иметь:
приравниваем
к нулю выражение в скобках. После
преобразования будем иметь:

Подставляя исходные данные задачи, получим:
![]() или
или
![]()
![]() .
.
Ответ:
![]()
![]() .
.
Приложения А
Образец оформления титульного Титульный листа
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Орловский государственный технический Университет