

Решение разностных уравнений.
![]() -
разностное уравнение
-
разностное уравнение
n – порядок разностного уравнения
Система разностных уравнений:
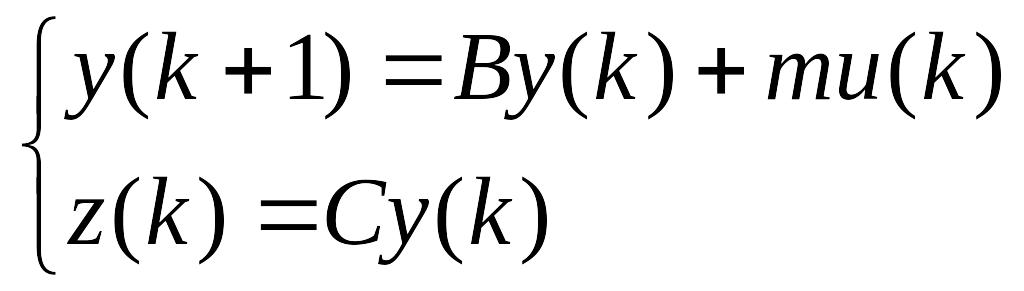
![]()
Способы решения разностных уравнений:
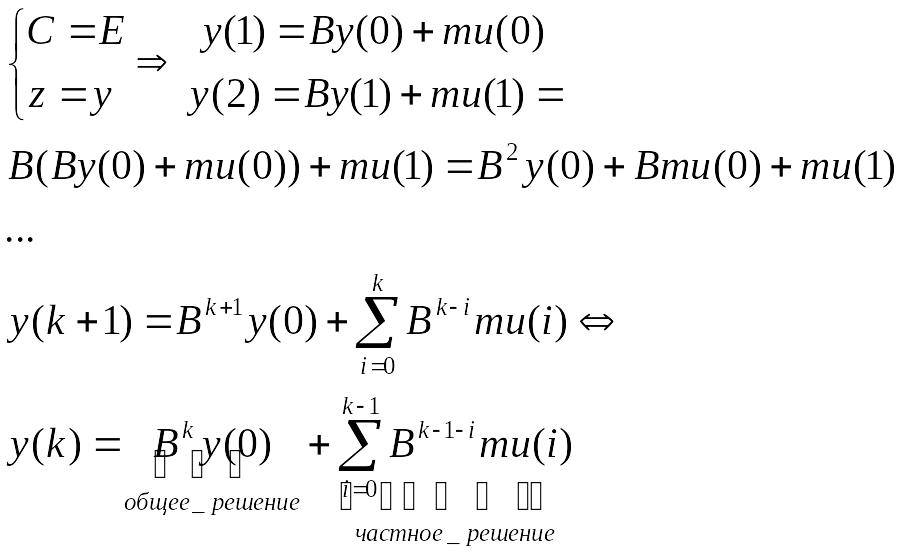
1) Итерационный способ
2) С помощью Z-преобразований
Итерационный способ
С помощью Z-преобразований
Пример
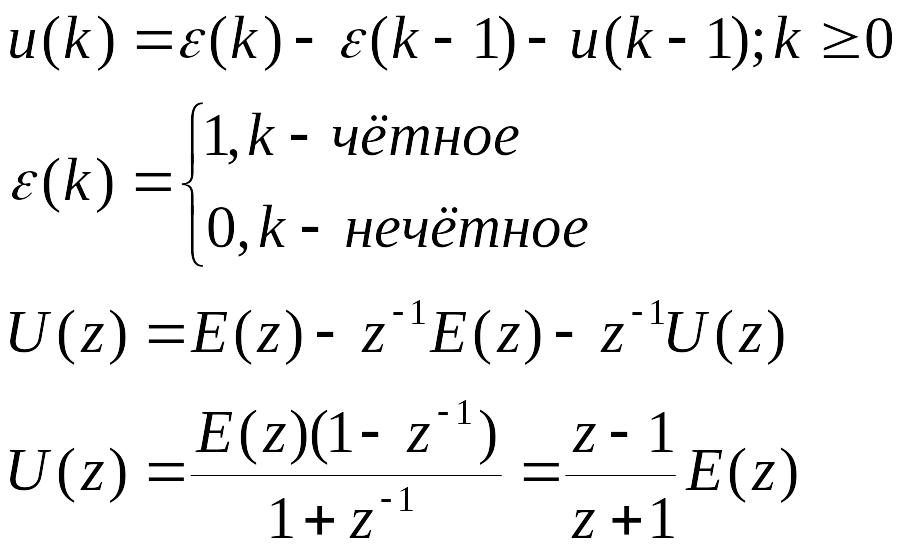
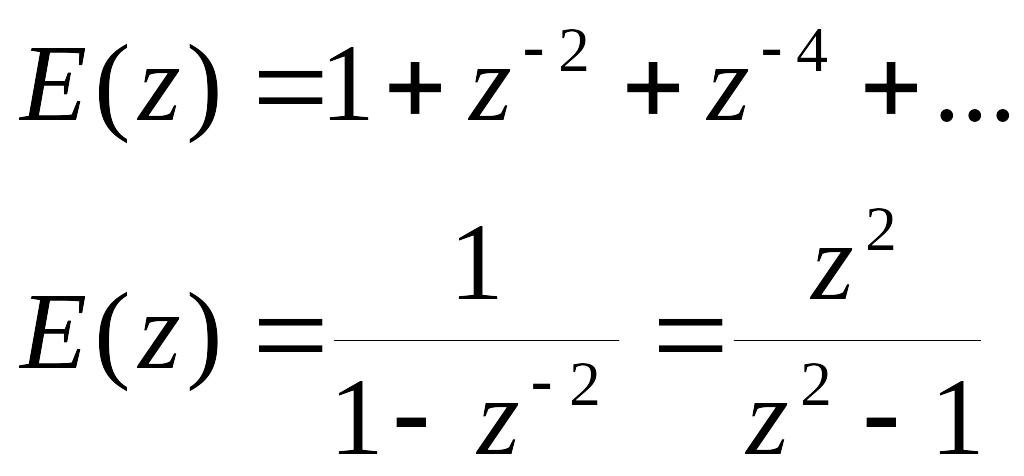
Зададим Z-преобразование для исходной последовательности:
Выразим выходной сигнал:
![]()
После деления многочлена z2 на z2+2z+1 получим:
![]()
=>
![]()
Обратное z – преобразование.
1)

2) Использование таблиц Z-преобразований
р![]() азлагается
на простые дроби, для которых в таблице
есть
азлагается
на простые дроби, для которых в таблице
есть
Z-преобразование
{1} |
|
{k} |
|
{ak} |
|
{kak} |
|
{sin(ak)} |
|
Пример
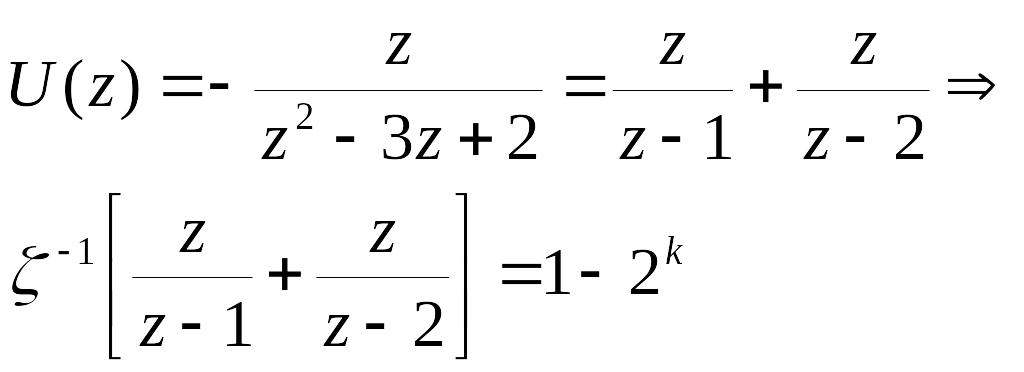
![]() ,
где
k=0,1,2…
,
где
k=0,1,2…
Модели дискретных систем в пространстве состояний. Схемы моделирования.
Импульсные системы управления. Квантователь и экстраполятор нулевого порядка.
Преобразование со звездочкой и его свойства.
Передаточные функции разомкнутых импульсных систем.
 ,где
Gоб
– передаточная ф–ция объекта управления
,где
Gоб
– передаточная ф–ция объекта управления
![]() – передаточная
функция в классической теории
автоматического управления
– передаточная
функция в классической теории
автоматического управления
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]()
![]()
Утверждение:![]() ;
;
![]() ;
;
![]() ;
;
![]()
Доказательство:
Согласно
определению
![]() ;
;![]() -
частота квантования;
-
частота квантования;
i – мнимая единица
Периодическая
функция с периодом
![]()
![]()
Б)
![]()
![]() ;
;
![]() ;
;
![]()
![]()
![]()
В)![]()
![]()
![]()
![]()
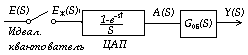
Разомкнутые системы, содержащие цифровые регуляторы
Схема
моделирования:
![]()
D(Z);
![]() ;
ЦР – решение разностных уравнений
;
ЦР – решение разностных уравнений
![]()
![]()
![]()
![]()
Передаточные функции замкнутых импульсных систем.
Замкнутые импульсные системы. Основополагающим является принцип обратной связи.
![]()
Составим передаточную функцию замкнутой системы.
![]()
![]()
![]()
Выразим
ошибку
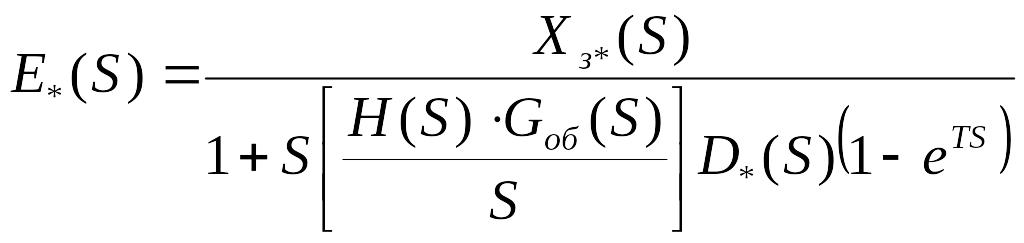
![]()
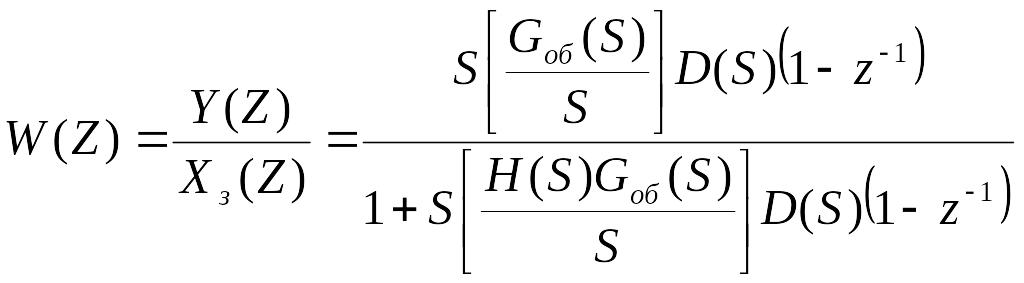
 -
передаточная функция общей замкнутой
системы
-
передаточная функция общей замкнутой
системы
Переход от непрерывных к дискретным динамическим системам в пространстве состояний.
Устойчивость линейных дискретных систем. Связь S- плоскости с Z- плоскостью.
Критерий устойчивости Джури.
Метод корневого годографа для непрерывных и дискретных систем управления.
Н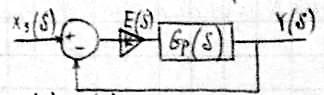 епрерывные
системы управления.
епрерывные
системы управления.
![]()
![]() k
- коэффициент усиления
k
- коэффициент усиления
Пусть
![]() , тогда
, тогда
![]() =>
=>
![]() ,
,
![]()
Необходимо выбрать k исходя из качества системы:
устойчивость
вид переходного процесса
установившиеся ошибки

Опр: под корневым годографом понимается траектория корней характеристического уравнения на комплексной плоскости для данной системы уравнений.
Свойства корневого годографа:
1) Количество ветвей корневого годографа совпадает с порядком n системы уравнений.
2) Траектории корней на плоскости S симметричны относительно оси абсцисс.
3)
Если k=0
P(S)=0
=> определяются полюса передаточной
функции разомкнутой системы
![]()
если
![]()
Переписывают характеристическое уравнение:
![]()
![]() =>
получаем нули перед ф-и разомкнутой
системы
=>
получаем нули перед ф-и разомкнутой
системы
Траектории
корней начинаются в полюсах разомкнутой
системы и заканчиваются в нулях
разомкнутой системы при
![]()
4)
Если
![]() - количество полюсов
,
а
- количество полюсов
,
а
![]() -
количество нулей
и
>
, то
-
количество нулей
и
>
, то
![]() ветвей
корневого годографа уходят в бесконечность.
ветвей
корневого годографа уходят в бесконечность.
Пример:

![]()
Характер. Полином для замкнутой системы:
![]()
![]()
![]() =>
=>
![]()
![]()
![]() =>
=>
![]()
Решим квадратное уравнение:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Если
![]() ,
то происходит отрыв от оси абсцисс:
,
то происходит отрыв от оси абсцисс:
![]()
Если
![]() ,
,![]()
Если
![]() ,
то имеем колебательный переходный
процесс.
,
то имеем колебательный переходный
процесс.
Если
![]() или
или
![]() ,
то апериодический переходный процесс.
,
то апериодический переходный процесс.
Условие устойчивости:
![]()
![]()
![]()
![]() -
система устойчива
-
система устойчива
Каждый
корень порождает частные решения:
![]() и
и
![]()
Их
линейная комбинация дает целое решение:
Если
![]() ,
то
,
то
![]()
Рассмотрим дискретную систему:
Э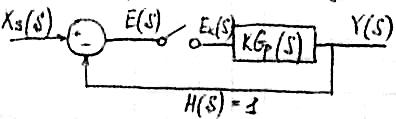 кстраполятор
0-ого порядка преобразует дискретный
сигнал в непрерывный.
кстраполятор
0-ого порядка преобразует дискретный
сигнал в непрерывный.
![]() ,
,
![]() -
передаточная функция объекта
-
передаточная функция объекта
![]()
![]()
![]()
Все свойства корневого годографа для дискретной системы полностью сохраняются. Однако вид КГ другой. Область устойчивости – единичный круг.
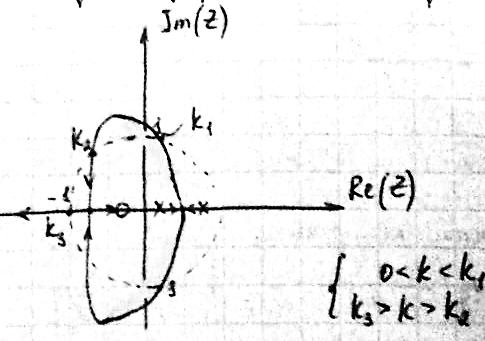 – Система
устойчива.
– Система
устойчива.