Идентификация динамических математических моделей.
Динамическая
модель:
![]() ,
где
,
где
b,M – скалярные величины (заданы),
y – вектор состояния,
u – управление.
Запишем непрерывную модель в дискретной форме:
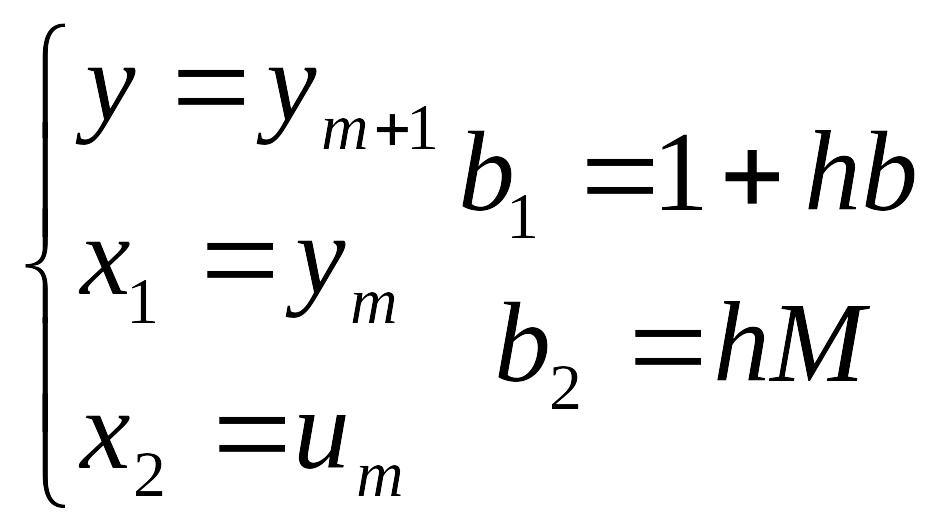
ym+1=ym+L(bym+Mum)
ym+1=(1+hb)ym+Mhum
![]() (ДМ
в какой-то момент времени).
(ДМ
в какой-то момент времени).
Задаваясь um, фиксируя ym и ym+1 в момент времени tm+1 и получим вектор входных и выходных переменных:
![]() и
тем самым заполнить матрице плана.
и
тем самым заполнить матрице плана.
Можно зафиксировать значения в другой момент времени. Сравнивая результаты, можно сказать, стационарна модель или нет.
ДМ:
;![]()
Количество выходов определяется размерностью y.
![]() (r=1)
(r=1)
![]()
![]()
![]()
Организуя измерения в два момента времени можно заполнить матрицу и т. д. Таким образом, ДМ сводится к аналогичной статической модели.
Последовательный (итерационный) метод наименьших квадратов при идентификации математических моделей.
y=bo+bx
y,x – скаляры;
bo – свободное слагаемое;
bo – мат ожидание y, то есть:
![]() ;
;
![]()
![]() ;
;
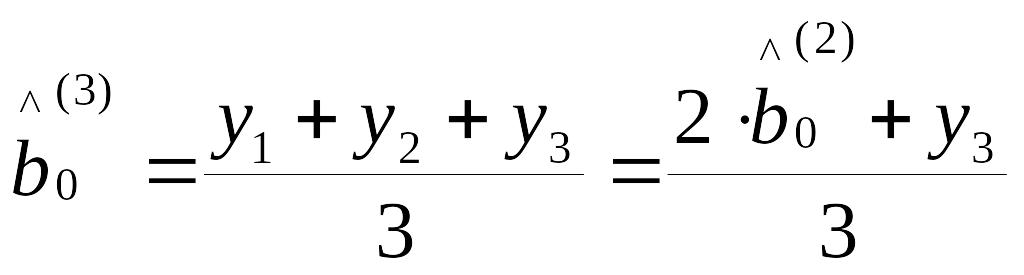
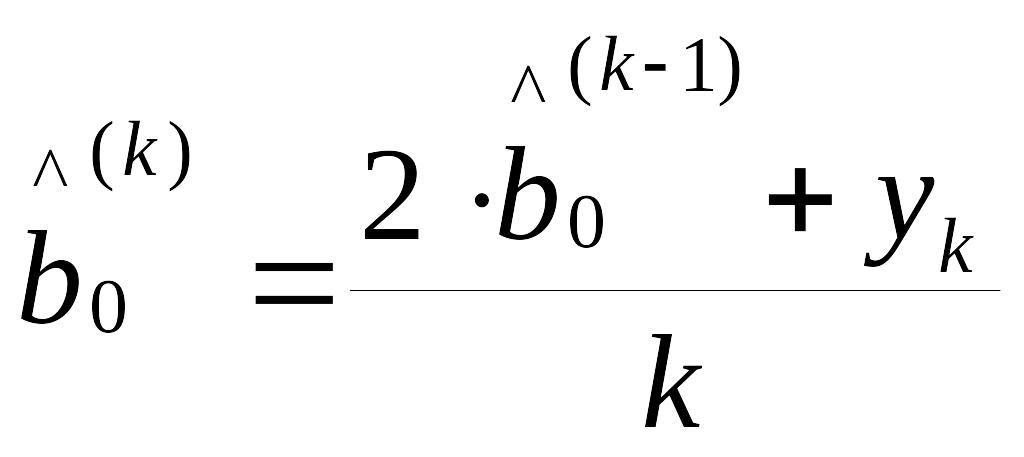
Итерационная
формула вычисления
![]() :
:
![]() -
оценка при K-измерении.
-
оценка при K-измерении.
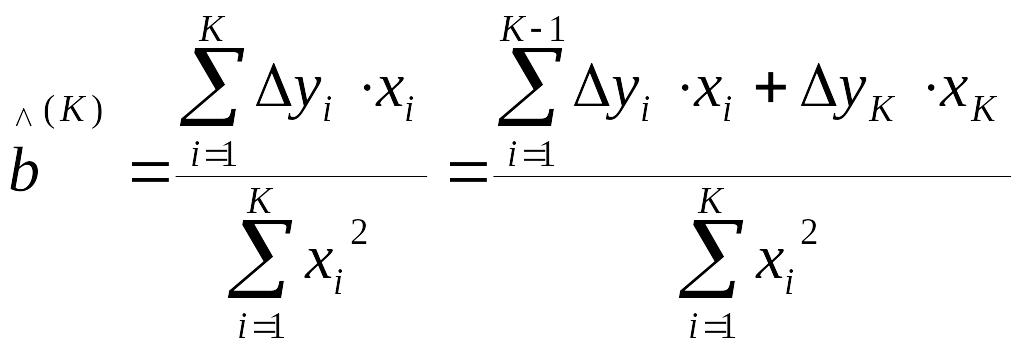
![]() =>
b(K)
=>
b(K)
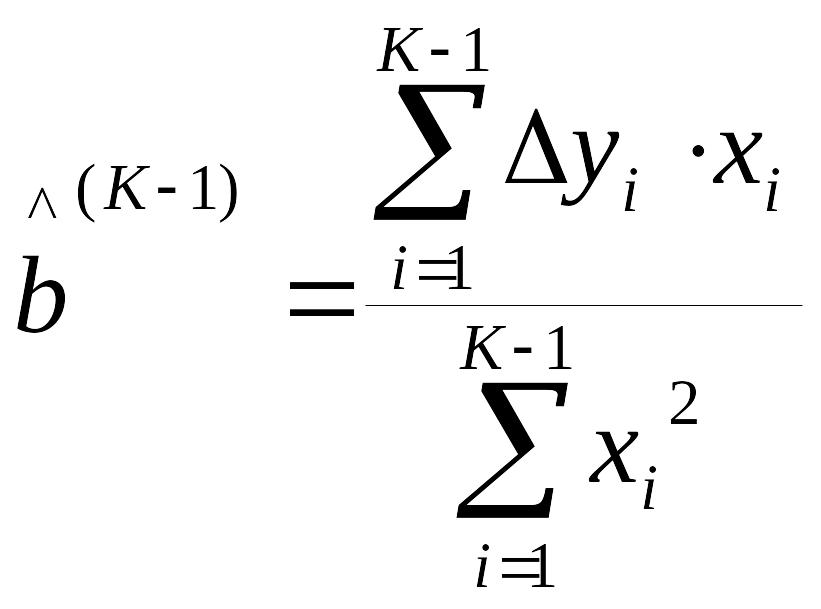
 запишем
по аналогии
запишем
по аналогии
 =>
=>
 подставим
подставим
Общий случай
СЛАУ МНК для k-измерений
![]() (1)*
(1)*
![]() (2)*
(2)*
![]()
![]()
(1)*
=>
![]() (3)*
(3)*
(2)*
=>
![]() (4)*
(4)*
Рассмотрим уравнение (3)*:
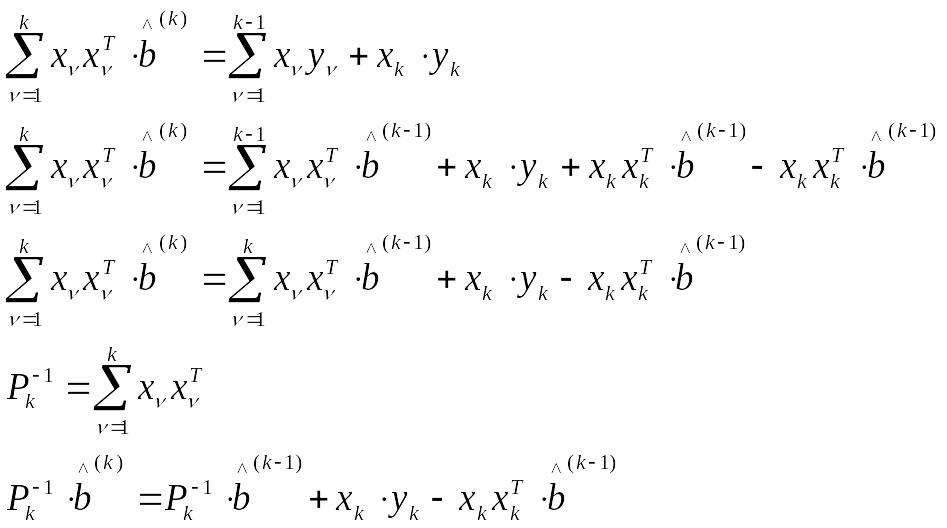
![]() (1)
(1)
 (1)
(1)
![]()
![]() :
:
![]()
![]() :
:
![]() (2)
(2)
![]() :
:
![]()
Справа
![]() :
:
![]()
![]()

Начальные
условия:
![]() ,
,![]() ,
,
![]()
![]()
Дискретные системы управления. Z – преобразование для линейных дискретных систем.

ЦСУ – цифровая система управления. (t)=

T – промежуток квантования; (KT) = (t) при KT=t; K – целое число; K=0,1,2…; ЦР – цифровой регулятор; u(t) – непрерывный сигнал; ОУ – объект управления.
ЛДС описывается разностными уравнениями:
![]()
![]() -
разностное уравнение
-
разностное уравнение
Выбираются следующие параметры:
T – промежуток квантования.
bm, am
Z-преобразование
{} – последовательность.
Z[(K)] = (0)+(1)z-1+(2)z-2+…
Коэффициенты – значения переменной в дискретные моменты времени.
Пример 1
Z[1(K)]=1+z-1+z-2+… q=z-1, a0=1
![]() ,
при
,
при
![]()
![]()
Пример 2
(K)=e-KT

Свойства z – преобразования.
![]()
1.
![]()
2.
![]()
3. Свойство сдвига
а)
![]()
Доказательство:
![]()
б)
![]()
Доказательство:
![]()
Пример
u(K)=a1(K)+a2(K-1)-b1u(K-1)
U(z)=a1E(z)+a2z-1E(z)-b1z-1U(z)
U(z)(1+ b1z-1)=E(Z)( a1+ a2z-1)
![]() -
передаточная функция
-
передаточная функция
4. начальное значение
![]()
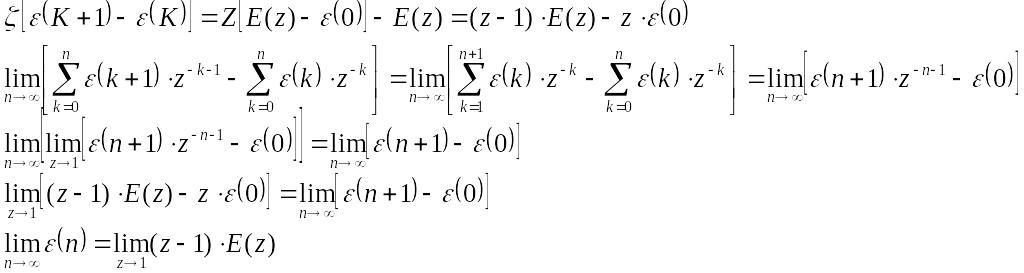
5. конечное значение
![]()
![]() -
неопределённость должна раскрываться.
-
неопределённость должна раскрываться.
Доказательство: