

Асинхронный пуск синхронной машины (не то!!!)
Пуск синхронного двигателя: одним из главных недостатков синхронного двигателя является сложность его пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Для осуществления асинхронного пуска в полюсных наконечниках ротора вкладывается дополнительно короткозамкнутая обмотка, т.к во время пуска в обмотке возбуждения двигателя наводится большая ЭДС, то по соображениям безопасности короткозамкнутая обмотка замыкается рубильником LM на разрядное сопротивление. При включении трехфазной цепи в обмотку статора трехфазного двигателя возникает вращающееся магнитное поле, которое пересекает короткозамкнутую обмотку и индуктирует в ней токи. Эти токи взаимодействуя с вращающимся полем статора приводят ротор во вращение, при достижении ротором максимальной скорости вращения (асинхронной при номинальном скольжении – 95-97% от синхронной скорости) рубильник переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Мощность и электромагнитный момент синхронной машины.
Электромагнитный момент неявнополюсной синхронной машины определяется выражением:
Рэм=(m1*E0*u1/xc) * sinѲ, где Ѳ – угол между осью поля статора и осью полюсов
При работе без нагрузки векторы этих МДС вращаясь с одинаковой синхронной частотой совпадают по направлению, то есть Ѳ=0, при этом Мэм=0, Рэм=0, но с появлением нагрузки ток статора уже не равен нулю, I1>0, то есть с возникновением электромагнитного момента вектора этих МДС ротора продолжают вращаться с прежней скоростью, смещаясь при этом относительно вектора МДС статора на угол Ѳ в направлении вращения, при этом Рэм > 0
Мэм=Рэм/w1
Мэм= (m1*E0*u1*sinѲ)/w1 xc
Рабочие характеристики синхронного двигателя
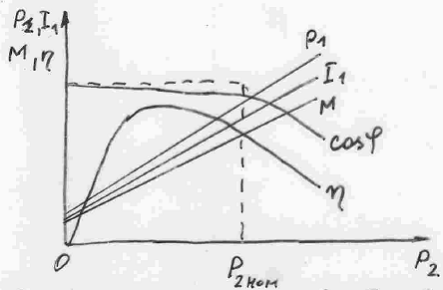
Скорость ротора n2, скольжение s, ток статора I1, потребляемая мощность, КПД двигателя, коэффициент мощности cos и момента от мощности(полезной) на валу.
При этом неизменными являются параметры сети, при которых происходит построение характеристик (U=const, f=const)
А)Скоростная характеристика
n2=f(P2)
При неизменной частоте, скорость при изменении нагрузки на валу в пределах допустимой остается постоянной.
Б)cosγ=f(P2)
При постоянном токе возбуждения увеличение нагрузки на валу вызывает уменьшение cosγ, что объясняется увеличением реактивного падения напряжения при возрастании потребляемого из сети тока
В) P1=f(P2) – потребляемая от полезной
П
τуст
отребляемая мощность P1 растет быстрее чем полезная мощность Р2 так как при увеличении нагрузки на валу сказывается увеличение электрических потерь двигателя, которые пропорциональны квадрату тока.Г) КПД от нагрузки: η=f(P2)
КПД с увеличением нагрузки резко увеличивается, достигая максимума тогда, когда независящие от нагрузки механические потери и потери в стали становятся равными, зависящим от нагрузки потерям в меди отмотках
Д) Момента на валу Mэм=f(P2)
Так как характеристики снимаются при условии постоянства частоты источника питания, следовательно угловая скорость w2 будет постоянной при значениях нагрузки в пределах допустимой. Так как момент прямо пропорционален полезной мощности и обратно пропорционален угловой скорости, то зависимость будет иметь вид прямой, выходящей из начала координат.
Е) Зависимость тока статора от мощности I1=f(P2)
При увеличении нагрузки при постоянном токе возбуждения происходит уменьшение cosφ