

Билет 22. 2) Требование устойчивости невозмущенного состояния объекта управления на примере поплавковой камеры карбюратора.
Поплавковая камера карбюратора Служит для регулировки (управления) уровнем бензина в карбюраторе. Целью является поддержания фиксированного уровня бензина. Впервые подобная идея управления уровнем жидкости была реализована более 2 тысяч лет назад в устройстве водяных часов.
Принцип работы системы достаточно прозрачен: 1) при уменьшении уровня бензина, поплавок, плавающий в бензине, понижается и воздействует на запорную иглу, которая открывает отверстие подачи бензина из бензобака, что и приводит к повышению уровня бензина; 2) при увеличении уровня бензина поплавок поднимается и запорная игла закрывает отверстие подачи из бензобака, что и приводит к уменьшению уровня бензина. Такое поведение поплавка приводит в целом к стабилизации уровня бензина в поплавковой камере. Уровень бензина в поплавковой камере определяет равномерность подачи бензина в камеру сгорания двигателя. Поэтому, если бы регулятора уровня бензина не было, то мы бы почувствовали ощутимые рывки и толчки при поездке на автомобиле. Устройством управления здесь служит поплавок + запорная игла, средством «измерения» уровня — поплавок, исполнительным устройством — запорная игла. Требование: если мы нальем много бензина, то поплавок будет колебаться, но через некоторое время примет нужное положение.
Билет 22. 3) Уровни планирования в организации. Под организацией будем понимать коллектив людей деятельность которых направлена на достижение общих целей. По степени отвлеченности (отдаленности) от основного процесса деятельности будем выделять уровни управления: высший, средний, низший. По функциональному признаку: операционный, управленческий, административный; по масштабу решаемых управленческих задач: стратегический, тактический, оперативный. Каждому уровню управления приписываются соответствующие функции и задачи, реализации и решения, которых, необходимо для "перемещения организации во времени" – её функционирования во времени. Это приводит нас к понятию управленческая пирамида организации. Управление организацией на стратегическом уровне будем называть стратегическим управлением. Если установление целей организации отвечает на вопрос, к чему организация должна стремиться, если план действий по достижению цели отвечает на вопрос, что надо и когда надо делать, чтобы достичь поставленной цели, то стратегия отвечает на вопрос, каким из допустимых способов, как организация будет эти цели достигать. При управлении организацией особую роль играет задача планирования - формирование плана действий по достижению цели организации. План должен содержать: а)перечень работ, которые необходимо выполнить в заданной последовательности, чтобы достичь цели; б)перечень ресурсов работ и сроки их выполнения; в)ожидаемые результаты работ и сроки их выполнения; г)указание, кто именно должен выполнить ту или иную работу плана.
Билет 19. 1) Основное уравнение теории автоматического регулирования. Компенсационное управление. Передаточная функция. Предположим, что мы изучаем систему автоматического регулирования, структурная диаграмма которой приведена ниже:
Пусть нам известны функциональные зависимости, связывающие входные и выходные параметры ОУ и управляемые переменные УУ, причем переменные x, y, z могут мыслиться как количества информации, поступающей и перерабатываемой ОУ и УУ. Пусть цель УУ – поддержание стационарного состояния ОУ в окрестности неподвижной точки (x0, z0, y0), т.е. . “Секрет” автоматического регулятора заключается в конструировании такого механизма, для которого желаемое значение регулируемой величины явилось точкой равновесия в фазовом пространстве и эта точка равновесия была бы аттрактором! Математическим оформлением этого факта служит понятие устойчивости и асимптотической устойчивости соответствующего решения (по Ляпунову).
Замечание:
Конечно, наиболее эффективный случай
управления в нашем примере – это случай
полной компенсации возмущения со стороны
ОС, т.е.
![]() ,
но он, естественно, в реальности
труднореализуем,
хотя бы потому, что он требует умения
«предсказывать будущее», так как в
реальности реакция запаздывает по
отношению к воздействию на ОУ, а мы
рассматриваем стационарную модель и
время не принимаем во внимание. Если
совсем уж упростить ситуацию, то в
качестве функциональных моделей (связь
вход – выход) можно рассмотреть линейную
пропорциональную связь, для которой
,
но он, естественно, в реальности
труднореализуем,
хотя бы потому, что он требует умения
«предсказывать будущее», так как в
реальности реакция запаздывает по
отношению к воздействию на ОУ, а мы
рассматриваем стационарную модель и
время не принимаем во внимание. Если
совсем уж упростить ситуацию, то в
качестве функциональных моделей (связь
вход – выход) можно рассмотреть линейную
пропорциональную связь, для которой
![]() и
тогда будем иметь
и
тогда будем иметь
![]() .
Теперь выбор «системы» управления (СУ)
заключается в подборе величины d,
чтобы
.
Теперь выбор «системы» управления (СУ)
заключается в подборе величины d,
чтобы
![]() принимал как можно меньшее значение.
Компенсационное управление может
принимать разнообразные формы. Например,
повышая требования, предъявляемые к
студентам на экзаменах, можно повышать
одновременно им и размер стипендии.
Примером компенсационного управления
может служить и разнообразные системы
страхования, широко используемые в
обществе.
принимал как можно меньшее значение.
Компенсационное управление может
принимать разнообразные формы. Например,
повышая требования, предъявляемые к
студентам на экзаменах, можно повышать
одновременно им и размер стипендии.
Примером компенсационного управления
может служить и разнообразные системы
страхования, широко используемые в
обществе.
Мы рассмотрели эффект наличия обратной связи в общем случае и пришли к соотношению, связывающему небольшое воздействие со стороны ОС на ОУ с реакцией ОУ: . Уже это соотношение, называемое «уравнением в вариациях» несет в себе некоторую информацию, позволяющую «создавать» системы управления с заданными свойствами («синтез» систем управления). Более подробно исследовать обратную связь начнем с изучения простейших механических систем, так как это самые простые системы из всех находящихся в нашем распоряжении. Полученные результаты могут быть перенесены также и в другие предметные области с помощью системной аналогии. Рассмотрим систему, функциональная схема которой приведена на рисунке. Пружина жесткостью К прикреплена к опоре вверху и может двигаться только в вертикальном направлении, что обеспечивается специальной конструкцией – кулисами без трения.
К нижнему концу
пружины может быть приложена сила f,
которая растягивает пружину. Это
растяжение (равно как и сжатие) может
регистрироваться (измеряться) с помощью
указателя
![]() ,
прикрепленного к пружине, и измерительной
шкалы, жестко связанной с вертикальной
стеной. Если на пружину не действует
никакая сила (f
= 0), то пружина находится в ненагруженной
состоянии, и
соответствует нулю шкалы (
=
0). Вообще говоря, силы, наблюдаемые в
ОС, могут зависеть и от t
– времени, что приведет к зависимости
удлинение пружины
,
прикрепленного к пружине, и измерительной
шкалы, жестко связанной с вертикальной
стеной. Если на пружину не действует
никакая сила (f
= 0), то пружина находится в ненагруженной
состоянии, и
соответствует нулю шкалы (
=
0). Вообще говоря, силы, наблюдаемые в
ОС, могут зависеть и от t
– времени, что приведет к зависимости
удлинение пружины
![]() .
Далее мы будем пользоваться обозначениями
f
и y,
а не
.
Далее мы будем пользоваться обозначениями
f
и y,
а не
![]() и
и![]() ,
но при этом не следует забывать эту
зависимость от времени. В терминах,
принятых для систем, f
– это входное
воздействие
(вход, стимул,
причина, возмущение, вынуждающая сила),
а y
– ее выходная
величина
(выход,
состояние, следствие, ответ, эффект,
реакция и
т.д.). Наша задача состоит в том, чтобы
определить закон поведения (функционирования,
эволюции) системы, связывающий обе эти
величины между собой. Эта задача решается
легко, если вспомнить закон Гука, в
соответствии с которым сила f
прямо пропорциональна растяжению y:
,
но при этом не следует забывать эту
зависимость от времени. В терминах,
принятых для систем, f
– это входное
воздействие
(вход, стимул,
причина, возмущение, вынуждающая сила),
а y
– ее выходная
величина
(выход,
состояние, следствие, ответ, эффект,
реакция и
т.д.). Наша задача состоит в том, чтобы
определить закон поведения (функционирования,
эволюции) системы, связывающий обе эти
величины между собой. Эта задача решается
легко, если вспомнить закон Гука, в
соответствии с которым сила f
прямо пропорциональна растяжению y:
![]() (1).
Коэффициент пропорциональности
называется жесткостью пружины и
определяется свойствами материала, из
которого пружина состоит. В частности,
если нагрузки на пружину очень большие,
то вместо закона Гука следует использовать
соотношение
(1).
Коэффициент пропорциональности
называется жесткостью пружины и
определяется свойствами материала, из
которого пружина состоит. В частности,
если нагрузки на пружину очень большие,
то вместо закона Гука следует использовать
соотношение
![]() вытекающее из закона упруго–пластического
течения или
вытекающее из закона упруго–пластического
течения или
![]() если деформации пружины принимать
абсолютно–пластическими. Разрешим
уравнение (1) относительно выходной
величины:
если деформации пружины принимать
абсолютно–пластическими. Разрешим
уравнение (1) относительно выходной
величины:
![]() (2) в соответствии с причинно–следственной
связью: f
- причина, y
- следствие. Это уравнение принято
назавать уравнением “Вход -
Выход”.Соотношение (2) может служить
примером модели с пропорциональной
зависимостью между входом и выходом.
Это соотношение простое алгебраическое
уравнение, при решении которого не
возникает никаких проблем. Оно просто
утверждает, что любому заданному значению
входа f
будет соответствовать единственное
значение выхода y,
вычисляемое по (2). Назовем множитель
передаточной
функцией
системы, которую будем определять как
величину выхода (y)
к величине входа (f).
(2) в соответствии с причинно–следственной
связью: f
- причина, y
- следствие. Это уравнение принято
назавать уравнением “Вход -
Выход”.Соотношение (2) может служить
примером модели с пропорциональной
зависимостью между входом и выходом.
Это соотношение простое алгебраическое
уравнение, при решении которого не
возникает никаких проблем. Оно просто
утверждает, что любому заданному значению
входа f
будет соответствовать единственное
значение выхода y,
вычисляемое по (2). Назовем множитель
передаточной
функцией
системы, которую будем определять как
величину выхода (y)
к величине входа (f).
Билет 19. 2) Принцип максимума Понтрягина. Общее описание. Под задачей управления динамическими системами будем понимать следующую задачу: как найти допустимое управляющее воздействие приводящее динамическую систему в заданное состояние. Рассмотрим динамическую систему с законом движения где x=(x1,x2,x3…) – фазовый вектор, однозначно определяющий состояние динамической системы, y- вектор внешних (входных) задающих и/или возмущающих воздействий, - фазовый вектор, задающий начальное состояние системы, t- время. Под оптимальным управлением будем понимать такое управление, которое удовлетворяет заданному критерию качества. . Выбор соответствующего оптимального управления дает теория оптимального управления, в частности принцип максимума Понтрягина. Согласно принципу максимума Понтрягина, алгоритм нахождения оптимального управления заключается в следующем: 1. Для каждого уравнения движения вводится двойственная переменная . 2. Строится функция Гамильтона-Понтрягина 3. Составляются уравнения и краевые условия при t=T для сопряженных переменных 4. При фиксированных x, ψ, t, значения управляющих параметров u*(t) определяются условием . 5. Из значений u(t), удовлетворяющих при каждом t предыдущему соотношению формируется управляющая траектория. Принцип максимума является необходимым условием оптимальности. С его помощью можно сузить множество процессов x(t),u(t), претендующих на роль оптимальных.
Билет 19. 3) Автоматизация управления. Преимущества механизма в контуре управления. Степень участия человека (величина противоположная степени автоматизации) в системах управления может изменяться в широких пределах от систем, в которых все управленческие функции выполняются человеком, до систем, в которых все эти функции реализуются автоматически. С одной стороны, современные средства автоматики не всегда могут заменить человека в системе управления. С другой стороны, существуют ситуации и объекты, управлять которыми человек не в состоянии по своим физическим возможностям. Преимущество человека в ситуациях: 1.Обнаружение сигналов в условиях сильного «шума». 2.Опознавание объектов при изменяющихся условиях восприятия 3.Действия в условиях неожиданных событий. 4.Способность к индукции – делать общие заключения, исходя из отдельных фактов. 5.Способность к самообучению на опыте. 6.Оригинальность мышления – способность находить новые, различные решения проблем. 7.Гибкость в действиях. 8.Приобретение новых навыков через одни лишь процедурные указания. 9.Способность работать в условиях перегрузок, сосредоточиться на главном, игнорируя второстепенные цели. Преимущество автоматики в ситуациях: 1.Время реакции системы управления – микросекунды (у человека ~ 20 миллисекунд); 2.Безошибочная повторяемость – человек в подобной ситуации заведомо склонен к ошибкам; 3.Накопление большого объема данных и ее обработка; 4.Дедуктивное рассуждение – определение принадлежности элемента к некоторому классу; 5.Контроль – способность человека контролировать редко возникающее явление – очень мала! 6.Широкий диапазон чувствительности – радиоволны, инфракрасные и ультрафиолетовые лучи, радиоактивное излучение и т.п.
Билет
21. 1) Переходные
и стационарные процессы в системе
автоматического регулирования. 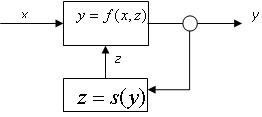 Если
регулирование происходит без
непосредственного участия человека то
оно называется автоматическим.
Предположим, что мы изучаем систему
автоматического регулирования,
структурная диаграмма которой приведена
ниже:
Если
регулирование происходит без
непосредственного участия человека то
оно называется автоматическим.
Предположим, что мы изучаем систему
автоматического регулирования,
структурная диаграмма которой приведена
ниже:
П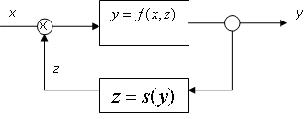 усть
нам известны функциональные зависимости,
связывающие входные и выходные параметры
ОУ и управляемые переменные УУ, причем
переменные x,
y,
z
могут мыслиться как количества информации,
поступающей и перерабатываемой ОУ и
УУ.
.
Пусть цель УУ – поддержание стационарного
состояния ОУ в окрестности неподвижной
точки (x0,
z0,
y0),
т.е.
.
“Секрет” автоматического регулятора
заключается в конструировании такого
механизма, для которого желаемое значение
регулируемой величины явилось точкой
равновесия в фазовом пространстве. Если
сигнал (воздействие, стимул) на ОУ со
стороны ОС изменятся и будет составлять
не x0,
а
усть
нам известны функциональные зависимости,
связывающие входные и выходные параметры
ОУ и управляемые переменные УУ, причем
переменные x,
y,
z
могут мыслиться как количества информации,
поступающей и перерабатываемой ОУ и
УУ.
.
Пусть цель УУ – поддержание стационарного
состояния ОУ в окрестности неподвижной
точки (x0,
z0,
y0),
т.е.
.
“Секрет” автоматического регулятора
заключается в конструировании такого
механизма, для которого желаемое значение
регулируемой величины явилось точкой
равновесия в фазовом пространстве. Если
сигнал (воздействие, стимул) на ОУ со
стороны ОС изменятся и будет составлять
не x0,
а
![]() ,
то УУ должно компенсировать это
воздействие величиной ,
,
то УУ должно компенсировать это
воздействие величиной ,![]() так что величина
так что величина
![]() должна
быть как можно меньше! Так как То
Поэтому в линейном приближении можно
записать, где Е
– единичная матрица. Если же в этой
системе управление «выключено», то было
бы справедливо следующее соотношение
должна
быть как можно меньше! Так как То
Поэтому в линейном приближении можно
записать, где Е
– единичная матрица. Если же в этой
системе управление «выключено», то было
бы справедливо следующее соотношение
![]() .
Наличие обратной связи в регулируемой
системе приводит к тому, что реакция
системы
.
Наличие обратной связи в регулируемой
системе приводит к тому, что реакция
системы
![]() на
возмущение
на
возмущение
![]() оказывается
«умноженной» на величину — оператор,
обратный к (
оказывается
«умноженной» на величину — оператор,
обратный к (![]() ),
при этом величина
(в
соответствующей норме) тем меньше, чем
меньше
),
при этом величина
(в
соответствующей норме) тем меньше, чем
меньше
![]() .
Упростим ситуацию, и управление будем
осуществлять в режиме
компенсации,
т.е. управляющее воздействие будем
присовокуплять с сигналом х на входе
ОУ.
.
Упростим ситуацию, и управление будем
осуществлять в режиме
компенсации,
т.е. управляющее воздействие будем
присовокуплять с сигналом х на входе
ОУ.
Тогда
З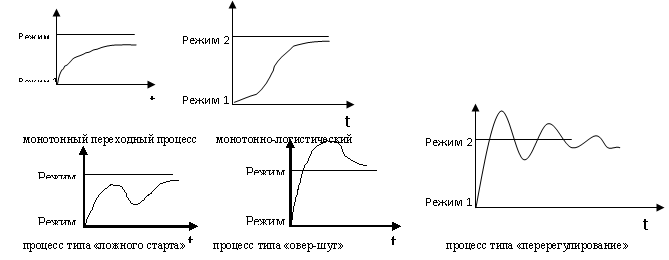 амечание:
Конечно,
наиболее эффективный случай управления
в нашем примере – это случай полной
компенсации возмущения со стороны ОС,
т.е.
,
но он, естественно, в реальности
труднореализуем, хотя бы потому, что он
требует умения «предсказывать будущее»,
так как в реальности реакция запаздывает
по отношению к воздействию на ОУ, а мы
рассматриваем стационарную модель и
время не принимаем во внимание. Возвращаясь
к основному уравнению теории регулирования
δ = (E – FzSy)-1Fx δx, связывающему возмущение
движения управляемой системы δy с
возмущением δx со стороны ОС обнаруживаем,
что уравнение в вариациях не воспроизводит
динамику процесса регулирования. Поэтому
понятие устойчивости к нему неприменимо
и необходимо функциональную зависимость
выхода и входа системы (ОУ и УУ) исследовать
как процесс, развивающийся во времени,
то есть рассматривать ОУ и УУ как
динамические. В связи с этим нас будут
интересовать так называемые переходные
процессы в системах регулировки,
возникающие при изменении режимов
работы регуляторов. Принимая исходный
режим и отождествляя его с нулевым
состоянием можно получить следующие
графики изменения показателя со временем
с соответствующими названиями переходных
процессов:
амечание:
Конечно,
наиболее эффективный случай управления
в нашем примере – это случай полной
компенсации возмущения со стороны ОС,
т.е.
,
но он, естественно, в реальности
труднореализуем, хотя бы потому, что он
требует умения «предсказывать будущее»,
так как в реальности реакция запаздывает
по отношению к воздействию на ОУ, а мы
рассматриваем стационарную модель и
время не принимаем во внимание. Возвращаясь
к основному уравнению теории регулирования
δ = (E – FzSy)-1Fx δx, связывающему возмущение
движения управляемой системы δy с
возмущением δx со стороны ОС обнаруживаем,
что уравнение в вариациях не воспроизводит
динамику процесса регулирования. Поэтому
понятие устойчивости к нему неприменимо
и необходимо функциональную зависимость
выхода и входа системы (ОУ и УУ) исследовать
как процесс, развивающийся во времени,
то есть рассматривать ОУ и УУ как
динамические. В связи с этим нас будут
интересовать так называемые переходные
процессы в системах регулировки,
возникающие при изменении режимов
работы регуляторов. Принимая исходный
режим и отождествляя его с нулевым
состоянием можно получить следующие
графики изменения показателя со временем
с соответствующими названиями переходных
процессов:
Рассматривая регулятор как управляемую систему, описываемую линейной динамической системой второго порядка, можно привести соответствующие условия на её коэффициенты, приводящие к тому или иному переходному процессу.
Билет 21. 2) Уравнение замкнутой управляемой системы на примере поплавковой камеры карбюратора. А Поплавковая камера карбюратора Служит для регулировки (управления) уровнем бензина в карбюраторе. Целью является поддержания фиксированного уровня бензина. Впервые подобная идея управления уровнем жидкости была реализована более 2 тысяч лет назад в устройстве водяных часов.
Принцип работы системы достаточно прозрачен: 1) при уменьшении уровня бензина, поплавок, плавающий в бензине, понижается и воздействует на запорную иглу, которая открывает отверстие подачи бензина из бензобака, что и приводит к повышению уровня бензина; 2) при увеличении уровня бензина поплавок поднимается и запорная игла закрывает отверстие подачи из бензобака, что и приводит к уменьшению уровня бензина. Такое поведение поплавка приводит в целом к стабилизации уровня бензина в поплавковой камере. Уровень бензина в поплавковой камере определяет равномерность подачи бензина в камеру сгорания двигателя. Поэтому, если бы регулятора уровня бензина не было, то мы бы почувствовали ощутимые рывки и толчки при поездке на автомобиле. Устройством управления здесь служит поплавок + запорная игла, средством «измерения» уровня — поплавок, исполнительным устройством — запорная игла.
Билет 21. 3) Миссия и цели организации. Под организацией будем понимать коллектив людей деятельность которых направлена на достижение общих целей. Люди создают организации для того, чтобы с их помощью решать свои проблемы. Это значит, что процессы, происходящие в организации, имеют целевую направленность, а значит должны быть управляемыми. Даже люди входят в члены организации для того, чтобы за счет этого достигать для себя определенный результат. Это тоже придает организации определенную целевую направленность. Наконец, люди, не входящие в состав коллектива организации, могут взаимодействовать с организацией, преследуя свой личные цели, если организация предоставит им соответствующие сервисы – решение интересующих людей проблем. Все это говорит о том, что целевое начало в деятельности организации должно быть ярко выражено. Конечно, имеет место, и некоторое исключение из правил – секретные службы, криминальные сообщества. Но и там целевое начало, безусловно, присутствует в их деятельности. Будем под миссией организации понимать наиболее общие цели, выражающие философию, предназначение и смысл существования организации. Миссия организации может пониматься и несколько уже - как сформулированное утверждение о том, для чего и по какой причине существует организация, отличие данной организации от ей подобных. Знание каждым членом коллектива миссии организации способствует созданию корпоративного духа организации, что, по мнению А.Файоля, способствует управлению, целенаправленному функционированию организации. Миссия организации задает общие ориентиры, то конкретное конечное состояние, к которому в каждый момент времени стремится организация, фиксируется в виде её целей. Будем понимать под целями организации – конкретное состояние отдельных характеристик организации, достижение которых является для нее желательным и на достижении которых направлена её деятельность. В зависимости от периода времени, требуемого для их достижения, цели делятся на долгосрочные и краткосрочные. В крупной организации с несколькими структурными подразделениями складывается иерархия целей, представляющая собой декомпозицию целей более высокого уровня в цели более низкого уровня. Специфика иерархического построения целей обусловлена тем, что цели более высокого уровня носят более широкий характер и имеют долгосрочный временной интервал достижения, цели низкого уровня это элементы декомпозиции целей высокого уровня. К целям предъявляются следующие требования: достижимость; гибкость; измеримость; конкретность; совместимость; приемлемость. Формулировку целей организации будем связывать с решением задачи целеполагания, решаемой на соответствующем уровне управления организацией.