

Билет 16. 1) Управление в технических системах. Системы с обратной связью. Примеры управляемых систем и процессов.
Основополагающими в технических системах являются решение задачи целеполагания и задачи синтеза (конструирования) такой управляемой системы, с помощью которой эту цель можно достичь. Если мы будем интересоваться техническими управляемыми системами, то список функций управления трансформируется следующим образом: 1)функция целеполагания или целеуказания – формулировка цели или выбор цели, если их несколько, ради которой создается, конструируется, проектируется данная техническая система. Например, регулировка (стабилизация) некоторой характеристики (уровень топлива, скорость вращения), слежение (наблюдение) за состоянием ОУ – система противовоздушной обороны, если отвлечься от наличия людей в этой системе. Если этот пример вызывает настороженность, то можно рассмотреть автоматическую систему слежения за доступом на охраняемый объект; 2)функция мониторинга (контроль) за состоянием ОУ – обобщенное название совокупности функций наблюдения (сложения), описания, оценки состояния (сравнение с эталоном, образцом, идентификация состояния); 3)функция выработки управляющего воздействия; 4)функция реализации управляющего воздействия; функция анализа применения управляющего воздействия. Системы с обратной связью. управление по принципу обратной связи, при котором выбор управляющего воздействия осуществляется исходя из информации о текущем состоянии ОУ относительно цели. В этом случае процесс управления может быть описан как процесс, состоящий из шагов: 1)Получение информации о состоянии ОУ; 2)Анализ состояния ОУ относительно цели; 3)Выбор управляющего воздействия из списка допустимых управляющих воздействий; 4)Применение управляющего воздействия к объекту управления. Для управления по принципу обратной связи характерно наличие так называемого замкнутого контура управления – движение информации с соответствующей трансформацией и изменениями материального носителя от ОУ к СУ и обратно.
Билет 16. 2) Человек как “биологический автомат”. Понятие об иерархических системах управления. Ответ в вопросе 1.
Билет 16. 3) Задачи тактического управления организацией. Под организацией будем понимать коллектив людей деятельность которых направлена на достижение общих целей. По масштабу решаемых управленческих задач выделим уровни управления: стратегический, тактический, оперативный. Управление организацией на стратегическом уровне называется стратегическим управлением. Если установление целей организации отвечает на вопрос, к чему организация должна стремиться, если план действий по достижению цели отвечает на вопрос, что надо и когда надо делать, чтобы достичь поставленной цели, то стратегия отвечает на вопрос, каким из допустимых способов, как организация будет эти цели достигать. При управлении организацией особую роль играет задача планирования - формирование плана действий по достижению цели организации. На основе стратегических планов организации формируется тактические планы. На основании тактических планов формируется задачи для тактического уровня управление: контроль состояния выполнения тактического плана, оценка качества выполнения работ, выявление причин невыполнения плана, согласование и корректировка планов, ресурсное обеспечение работ. Опускаясь по управленческой пирамиде, приходим к нижнему оперативному уровню управления в организации. Для реализации тактических планов составляются оперативные планы. Основе в оперативном уровне управления, это контроль исполнения оперативного плана, корректировка оперативного плана и оперативное распределение ресурсов (трудовых, материальных, финансовых и т.д.) для реализации основного процесса деятельности организации. Задачи, решаемые на соответствующем уровне управления, объединяются, соответственно, в задачи стратегического управления, задачи тактического управления, задачи оперативного управления. Эти задачи отличаются своими масштабами и сроками решения.
Билет
23. 1) Задачи
регулирования (стабилизации) и слежения.
Сходство и отличие. Под
регулированием
будем понимать процесс поддержания или
изменения по заданным условиям некоторой
величины (показателя) с помощью
целенаправленного воздействия —
управления. Показатель
– величина (информация), на знании
которой основывается процесс регулирования.
Критерий
– заданное условие, ограничение,
накладываемое на показатель регулирования
Ω. Наиболее часто употребляемые критерии
имеют вид: равенства:
a)
Ω = const
неравенства:
![]() интегрального
условия:
интегрального
условия:![]() дифференциального
условия:
дифференциального
условия:
![]() .
С задачей
регулирования
тесно связана задача
слежения. В
этом случае задающий сигнал (условие)
испытывает зависимость от времени. К
необходимости регулировки приводит
изменение желаемого режима функционирования
системы из-за внешних воздействий со
стороны ОС или изменения свойств
элементов системы и/или свойств
взаимодействия элементов системы между
собой. Если регулирование происходит
без непосредственного участия человека
то оно называется автоматическим.
При этом функции, которые выполнял
человек субъект управления: наблюдение
за показателями состояния ОУ, измерение
показателей, определение отклонения
показателей от заданного критерия,
выработка регулирующего воздействия,
применение регулирующего воздействия
должны реализовываться специально
созданным для этого устройством
управления – автоматическим
регулятором.
При этом на человека уже возлагаются
другие функции: контроль за работоспособностью
(исправностью) регулятора; принятия
управления «на себя», в случае обнаружения
неисправности регулятора; вызова
наладчика для устранения обнаруженного
неисправленного регулятора; выявление
неисправности; приведение устройства
в работоспособное состояние –ремонт.
.
С задачей
регулирования
тесно связана задача
слежения. В
этом случае задающий сигнал (условие)
испытывает зависимость от времени. К
необходимости регулировки приводит
изменение желаемого режима функционирования
системы из-за внешних воздействий со
стороны ОС или изменения свойств
элементов системы и/или свойств
взаимодействия элементов системы между
собой. Если регулирование происходит
без непосредственного участия человека
то оно называется автоматическим.
При этом функции, которые выполнял
человек субъект управления: наблюдение
за показателями состояния ОУ, измерение
показателей, определение отклонения
показателей от заданного критерия,
выработка регулирующего воздействия,
применение регулирующего воздействия
должны реализовываться специально
созданным для этого устройством
управления – автоматическим
регулятором.
При этом на человека уже возлагаются
другие функции: контроль за работоспособностью
(исправностью) регулятора; принятия
управления «на себя», в случае обнаружения
неисправности регулятора; вызова
наладчика для устранения обнаруженного
неисправленного регулятора; выявление
неисправности; приведение устройства
в работоспособное состояние –ремонт.
Если основная задача управления заключается в том, чтобы выходной сигнал системы «следил» за меняющимся задающим сигналом yi= yi(t) , то такая система управления называется следящей. Если же основная задача управления заключается в том, чтобы выходной сигнал поддерживался равным или приблизительно равным постоянному задающему сигналу (уставке) yi= const, то такая система управления называется регулятором. Примером системы первого типа может служить система управления противовоздушной обороны, а второго – карбюратор, терморегулятор инкубатора и т.п. Для того, чтобы разобраться в следующей системе управления добавим к пружине амортизатор,усилие которого определяется скоростью изменения растяжения. Тогда модель этой системы – модель ОУ примет следующий вид: (4), где fd – шум, а управляющее воздействие fс осуществляется пропорциональным регулятором fс = k (yi - yо) (5). Подобные системы управления, движения которых имеют первый порядок, назовем системами первого порядка.
Билет 23. 2) Принципы управления динамическими системами. Под задачей управления динамическими системами будем понимать следующую задачу: как найти допустимое управляющее воздействие приводящее динамическую систему в заданное состояние. В качестве примера управления динамической системой рассмотрим управление движением материальной точки по прямой линии. Это может служить простейшей моделью движения автомобиля по прямой дороге. Под "заданным состоянием" будем понимать начало координат фазового пространства (пространства состояния динамической системы), в нашем простом случае фазовое пространство характеризуется двумя цифрами. Уравнение движения материальной точки может быть записано с помощью второго закона Ньютона в виде: (1), где m- масса материальной точки, f - результирующая сил, действующих на точку. Эта результирующая, вообще говоря, может зависеть от положения точки x и её скорости dx/dt. Чтобы корректно сформулировать математическую задачу для дифференциального уравнения (1) надо добавить начальные данные x(0)= 0, dx/dt(0)= 1 (2), задающие положение и скорость точки в начальный момент времени. Задачей теории управления в данной ситуации служит выбор силового воздействия, такого, что под действием этого воздействия, точка из начального положения ( 0, 1) за некоторое время T попадет в заданное состояние, а именно – начало координат. В этом случае возможны различные постановки, связанные с управлением. Например, подобрать f так, чтобы переход в начало координат осуществлялся за минимальное время. Подобная задача в теории управления носит название задачи о быстродействии. Мы можем рассмотреть например задачу о максимуме пути, пройденном точкой за заданное время. Если мы введем функцию стоимости, связанную с состоянием динамической системы U(x,t), то может быть сформулирована и задача перевода динамической системы в заданное состояние с минимальным интегралом функции стоимости. (3). Вообще говоря, сформулированные нами задачи не являются независимыми, то есть решение одной задачи может являться и решением другой.
Под оптимальным управлением будем понимать такое управление, которое удовлетворяет заданному критерию качества. Выбор соответствующего оптимального управления дает теория оптимального управления, в частности принцип максимума Понтрягина, найденный Понтрягиным с коллегами. Согласно принципу максимума Понтрягина, алгоритм нахождения оптимального управления заключается в следующем: 1. Для каждого уравнения движения вводится двойственная переменная . 2. Стоится функция Гамильтона-Понтрягина . 3. Составляются уравнения и краевые условия при t=T для сопряженных переменных . 4. При фиксированных x, ψ, t, значения управляющих параметров u*(t) определяются условием 5. Из значений u(t), удовлетворяющих при каждом t предыдущему соотношению формируется управляющая траектория. Принцип максимума является необходимым условием оптимальности. С его помощью можно сузить множество процессов x(t),u(t), претендующих на роль оптимальных.
Билет 23. 3) Модели принятия решений в организациях. Основной механизм управления в организациях это принятие управленческого решения и его последующая реализация. Под управленческим решением будем понимать: 1)выбор альтернативы, осуществленный руководителем в рамках его должностных полномочий, компетенции и направленный на достижение целей организации; 2)директивный акт целенаправленного воздействия на ОУ, основанный на анализе данных, характеризующих конкретную управленческую ситуацию, определение цели действий и содержащих программу достижения цели. В процессе функционирования в организации принимается большое количество самых разнообразных управленческих решений, обладающих различными характеристиками. Исследование процесса принятия решения на уровне организации выявило четыре типа подходов: на основе теории управления, модель Карнеги, модель инкрементального процесса принятия решения, модель мусорного ящика. Подход на основе теории управления: используется тогда, когда проблема поддается анализу и может быть построена соответствующая математическая модель. Такой подход характерен для однокритериальных проблем. Модель Карнеги: К решениям на уровне организации подключаются многие менеджеры и окончательный выбор альтернативы управленческого решения делается в коалиции. При этом, в условиях неопределенности и недостатка информации, принимается то решение, которое всех устраивает а не то, которое может считаться эффективным. Модель инкрементального процесса принятия решения: если время и ситуация позволяет, то процесс выработки УР достаточно длителен и содержит фазу осознания наличия проблемы, фазу идентификации проблемы, фазу разработки, фазу выбора. Принятие УР это динамический процесс, содержащий много циклов пока проблема будет решена. Модель мусорного ящика: для организаций в которых характерна т.н. организованная анархия из-за неопределенности, порождаемой проблематичностью предпочтений, нечеткой и плохо понимаемой технологией принятия решения, текучестью кадров. Организованная анархия свойственна тем организациям, для которых характерны частые изменения и небюрократическая коллегиальная обстановка. Суть этой модели в том, что в организации существуют потоки проблем, потенциальных решений, участников принятия решений, благоприятные возможности для выбора. Проблемы решаются, если эти четыре потока должным образом прореагируют друг с другом.
Билет 17. 1) Задачи слежения и регулировки (стабилизации). Типы регуляторов. Под регулированием будем понимать процесс поддержания или изменения по заданным условиям некоторой величины (показателя) с помощью целенаправленного воздействия — управления. Показатель – величина (информация), на знании которой основывается процесс регулирования. Критерий – заданное условие, ограничение, накладываемое на показатель регулирования Ω. С задачей регулирования тесно связана задача слежения. В этом случае задающий сигнал (условие) испытывает зависимость от времени. К необходимости регулировки приводит изменение желаемого режима функционирования системы из-за внешних воздействий со стороны ОС или изменения свойств элементов системы и/или свойств взаимодействия элементов системы между собой. Если регулирование происходит без непосредственного участия человека то оно называется автоматическим. Если основная задача управления заключается в том, чтобы выходной сигнал системы «следил» за меняющимся задающим сигналом yi= yi(t) , то такая система управления называется следящей. Если же основная задача управления заключается в том, чтобы выходной сигнал поддерживался равным или приблизительно равным постоянному задающему сигналу (уставке) yi= const, то такая система управления называется регулятором. Примером системы первого типа может служить система управления противовоздушной обороны, а второго – карбюратор, терморегулятор инкубатора и т.п. Для того, чтобы разобраться в следующей системе управления добавим к пружине амортизатор,усилие которого определяется скоростью изменения растяжения Тогда модель этой системы – модель ОУ примет следующий вид: (4) где fd – шум, а управляющее воздействие fс осуществляется пропорциональным регулятором fс = k (yi - yо) (5)
Подобные системы
управления, движения которых имеют
первый порядок, назовем системами
первого порядка.
![]() (8).Соотношение(8)
назовем управлением
движения системы с обратной связью.
Это управление позволит нам проанализировать,
какие свойства приобрела система при
наличии обратной связи.
(8).Соотношение(8)
назовем управлением
движения системы с обратной связью.
Это управление позволит нам проанализировать,
какие свойства приобрела система при
наличии обратной связи.
Рассматривая сначала П-регулятор (13), можно сделать следующие выводы, что введение П-регулятора
1) не изменяет порядок управления движения;
2) увеличивает
собственную частоту системы
![]() ;
;
3) уменьшает
коэффициент затухания
![]() (16)
(16)
Эффект увеличения
собственной частоты является желательным,
поскольку он увеличивает быстродействие
системы. Однако уменьшение коэффициента
затухания
![]() может привести к возникновению (усилению)
нежелательных колебаний. Установившаяся
погрешность характерная как для задачи
слежения, так и задачи регулировки
уменьшается при увеличении kp.
Таким образом, если мы ограничиваемся
только П-регулятором для ОУ описываемого
системой второго порядка, мы приходим
к противоречивым требованиям, которым
надо удовлетворить при выборе наилучшего
коэффициента усиления регулятора. Это
требует выбора определенного компромиссного
значения kp.
Однако совмещая П-регулятор с другими
видами управления можно добиться лучших
результатов. Анализ управления (15)
описываемого ПД управления, замечаем
что коэффициент затухания теперь
выглядит так:
может привести к возникновению (усилению)
нежелательных колебаний. Установившаяся
погрешность характерная как для задачи
слежения, так и задачи регулировки
уменьшается при увеличении kp.
Таким образом, если мы ограничиваемся
только П-регулятором для ОУ описываемого
системой второго порядка, мы приходим
к противоречивым требованиям, которым
надо удовлетворить при выборе наилучшего
коэффициента усиления регулятора. Это
требует выбора определенного компромиссного
значения kp.
Однако совмещая П-регулятор с другими
видами управления можно добиться лучших
результатов. Анализ управления (15)
описываемого ПД управления, замечаем
что коэффициент затухания теперь
выглядит так:
![]() (17). Теперь с одной стороны мы можем
выбрать коэффициент П-регулятора kp
достаточно большим, чтобы уменьшить
установившуюся погрешность регулировки
и с другой – за счет выбора коэффициента
Д-регулятора kr
сохранить нужное значение коэффициента
затухания. Вообще говоря, Д-регулятор,
увеличивая коэффициент затухания
системы, увеличивает устойчивость
системы. Отметим, однако, что и Д-регулятор
не устраняет установившуюся погрешность
полностью, для чего нам надо было бы
взять kr
>> 1. В заключении рассмотрим еще один
тип управления, который устраняет эту
установившуюся погрешность. Этот тип
управления называется интегральным.
При таком управлении сигналу ошибки
пропорциональна скорость изменения
управляющего сигнала (а не сам сигнал!)
(18). Из (18) ясно, что управляющее воздействие
yc
регулятора будет изменяться до тех пор,
пока ошибка отличается от нуля.
Происхождение термина «интегральный»
становится ясным, если проинтегрировать
(18) по времени, что дает:
(19) или управляющее воздействие
определяется как пропорциональное
интегралу сигнала ошибки во времени.
Интегральный регулятор как бы «запоминает»
поведение ошибки во времени, и эта
память, сохраняемая регулятором и после
того, как сигнал ошибки стал равен нулю,
позволяет поддерживать корректирующее
воздействие, необходимое для компенсации
сигнала ошибки. В этом состоит коренное
отличие И-регулятора от П и Д-регуляторов.
(17). Теперь с одной стороны мы можем
выбрать коэффициент П-регулятора kp
достаточно большим, чтобы уменьшить
установившуюся погрешность регулировки
и с другой – за счет выбора коэффициента
Д-регулятора kr
сохранить нужное значение коэффициента
затухания. Вообще говоря, Д-регулятор,
увеличивая коэффициент затухания
системы, увеличивает устойчивость
системы. Отметим, однако, что и Д-регулятор
не устраняет установившуюся погрешность
полностью, для чего нам надо было бы
взять kr
>> 1. В заключении рассмотрим еще один
тип управления, который устраняет эту
установившуюся погрешность. Этот тип
управления называется интегральным.
При таком управлении сигналу ошибки
пропорциональна скорость изменения
управляющего сигнала (а не сам сигнал!)
(18). Из (18) ясно, что управляющее воздействие
yc
регулятора будет изменяться до тех пор,
пока ошибка отличается от нуля.
Происхождение термина «интегральный»
становится ясным, если проинтегрировать
(18) по времени, что дает:
(19) или управляющее воздействие
определяется как пропорциональное
интегралу сигнала ошибки во времени.
Интегральный регулятор как бы «запоминает»
поведение ошибки во времени, и эта
память, сохраняемая регулятором и после
того, как сигнал ошибки стал равен нулю,
позволяет поддерживать корректирующее
воздействие, необходимое для компенсации
сигнала ошибки. В этом состоит коренное
отличие И-регулятора от П и Д-регуляторов.
Билет 17. 2) Автоматизация управления. Преимущества человека перед автоматом в контуре управления. Степень участия человека (величина противоположная степени автоматизации) в системах управления может изменяться в широких пределах от систем, в которых все управленческие функции выполняются человеком, до систем, в которых все эти функции реализуются автоматически. С одной стороны, современные средства автоматики не всегда могут заменить человека в системе управления. С другой стороны, существуют ситуации и объекты, управлять которыми человек не в состоянии по своим физическим возможностям. Преимущество человека в ситуациях: 1.Обнаружение сигналов в условиях сильного «шума». 2.Опознавание объектов при изменяющихся условиях восприятия 3.Действия в условиях неожиданных событий. 4.Способность к индукции – делать общие заключения, исходя из отдельных фактов. 5.Способность к самообучению на опыте. 6.Оригинальность мышления – способность находить новые, различные решения проблем. 7.Гибкость в действиях. 8.Приобретение новых навыков через одни лишь процедурные указания. 9.Способность работать в условиях перегрузок, сосредоточиться на главном, игнорируя второстепенные цели. Преимущество автоматики в ситуациях: 1.Время реакции системы управления – микросекунды (у человека ~ 20 миллисекунд); 2.Безошибочная повторяемость – человек в подобной ситуации заведомо склонен к ошибкам; 3.Накопление большого объема данных и ее обработка; 4.Дедуктивное рассуждение – определение принадлежности элемента к некоторому классу; 5.Контроль – способность человека контролировать редко возникающее явление – очень мала! 6.Широкий диапазон чувствительности – радиоволны, инфракрасные и ультрафиолетовые лучи, радиоактивное излучение и т.п.
Билет 17. 3) Задачи оперативного управления организацией. Под организацией будем понимать коллектив людей (больше одного) деятельность которых направлена на достижение общих целей. По масштабу решаемых управленческих задач выделим уровни управления: стратегический, тактический, оперативный. Управление организацией на стратегическом уровне называется стратегическим управлением. Если установление целей организации отвечает на вопрос, к чему организация должна стремиться, если план действий по достижению цели отвечает на вопрос, что надо и когда надо делать, чтобы достичь поставленной цели, то стратегия отвечает на вопрос, каким из допустимых способов, как организация будет эти цели достигать. При управлении организацией особую роль играет задача планирования - формирование плана действий по достижению цели организации. На основе стратегических планов организации формируется тактические планы. На основании тактических планов формируется задачи для тактического уровня управление: контроль состояния выполнения тактического плана, оценка качества выполнения работ, выявление причин невыполнения плана, согласование и корректировка планов, ресурсное обеспечение работ. Опускаясь по управленческой пирамиде, приходим к нижнему оперативному уровню управления в организации. Для реализации тактических планов составляются оперативные планы. Основе в оперативном уровне управления, это контроль исполнения оперативного плана, корректировка оперативного плана и оперативное распределение ресурсов (трудовых, материальных, финансовых и т.д.) для реализации основного процесса деятельности организации. Задачи, решаемые на соответствующем уровне управления, объединяются, соответственно, в задачи стратегического управления, задачи тактического управления, задачи оперативного управления. Эти задачи отличаются своими масштабами и сроками решения.
Билет 20. 1) SCADA и DCS технологии как основа автоматизации систем управления технологическими процессами.Если регулирование происходит без непосредственного участия человека то оно называется автоматическим. В настоящее время при автоматизации регулирования производственных процессов широко используются компьютерные технологии. Задачи автоматического регулирования представляют «нижнюю» группу задач в иерархии управления производством и они решаются с помощью систем типа SCADA (Supervisory Control and Data Acquisition) или DCS (Distributed Control Systems). Оба указанных типа систем относятся в отечественной классификации к классу Автоматизированных Систем Управления Технологическими Процессами (АСУТП). Системы типа SCADA и DCS относятся к классу MMI (Man-Machine Interface) или HMI (Human-Machine Interface) и обеспечивают «человеко-машинный интерфейс» в смысле обеспечения двухсторонней связи «оператор – технологическое оборудование». Далее под классом MMI (HMI) систем будем понимать такие системы, которые реализуют функции отображения, представления технологической информации и позволяют оператору оказывать на него (технологический процесс) влияние. С точки зрения общих принципов управления принципиальной разницы между системами SCADA и DCS нет. Однако углубленный анализ специализированной литературы приводят к тому, что системы типа SCADA тяготеют к серверной архитектуре. Сервер осуществляет сбор информации от контроллеров, её обработку и передачу им управляющих воздействий. Этот же сервер – узел управления может быть рабочим местом оператора. К классу DCS можно отнести однородные системы, распределенные не только территориально, но и композиционно в смысле равноправных разнофункциональных узлов. Замена оператора автоматическим регулятором имеет свои плюсы и минусы. В частности, устранение человека из контура управления уменьшает влияние «человеческого фактора» - свойства человека ошибаться (неверно выбирать управляющее воздействие) в обстановке, совершенно к этому не располагающей или систематически сознательно нарушать предписание требований безопасности.
Билет 20. 2 ) Модель объекта управления: уравнение “вход- выход”. Модель устройства управления. Модель поплавковой камеры карбюратора. Если в нашем распоряжении имеется модель ОУ, адекватно описывающей поведение ОУ при воздействии со стороны ОС и реакции на УВ, то возможно управление при наличии модели. Структурная схема управляемой системы в этом случае примет вид:
Подобный принцип управления характерен для ряда непрерывных производств (химических, и т.д.) или для управления социосистемами, где в качестве модели выделяется группа лиц и только их состояние отслеживается для организации управления (например, система рейтингов на телевидении, социологические опросы населения).
В![]() соответствии с причинно–следственной
связью: f
- причина, y
- следствие. Это уравнение принято
назавать уравнением “Вход - Выход”.
Назовем множитель
соответствии с причинно–следственной
связью: f
- причина, y
- следствие. Это уравнение принято
назавать уравнением “Вход - Выход”.
Назовем множитель
![]() передаточной
функцией
системы, которую будем определять как
величину выхода (y)
к величине входа (f).
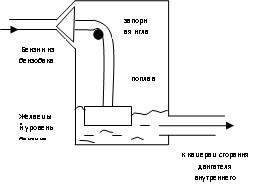
Поплавковая
камера карбюратора
Служит для регулировки уровнем бензина
в карбюраторе. Целью является поддержания
фиксированного уровня бензина. Впервые
подобная идея управления уровнем
жидкости была реализована более 2 тысяч
лет назад в устройстве водяных часов.
передаточной
функцией
системы, которую будем определять как
величину выхода (y)
к величине входа (f).
Поплавковая
камера карбюратора
Служит для регулировки уровнем бензина
в карбюраторе. Целью является поддержания
фиксированного уровня бензина. Впервые
подобная идея управления уровнем
жидкости была реализована более 2 тысяч
лет назад в устройстве водяных часов.
Принцип работы системы достаточно прозрачен: 1) при уменьшении уровня бензина, поплавок, плавающий в бензине, понижается и воздействует на запорную иглу, которая открывает отверстие подачи бензина из бензобака, что и приводит к повышению уровня бензина; 2) при увеличении уровня бензина поплавок поднимается и запорная игла закрывает отверстие подачи из бензобака, что и приводит к уменьшению уровня бензина. Такое поведение поплавка приводит в целом к стабилизации уровня бензина в поплавковой камере. Уровень бензина в поплавковой камере определяет равномерность подачи бензина в камеру сгорания двигателя. Если бы регулятора уровня бензина не было, то мы бы почувствовали ощутимые рывки и толчки при поездке на автомобиле. Устройством управления служит поплавок + запорная игла, средством «измерения» уровня — поплавок, исполнительным устройством — запорная игла.
Билет 20. 3) Уровни управления в организации. Под организацией будем понимать коллектив людей деятельность которых направлена на достижение общих целей. По степени отвлеченности от основного процесса деятельности будем выделять уровни управления организацией: высший, средний, низший. По функциональному признаку: операционный, управленческий, административный; по масштабу решаемых управленческих задач: стратегический, тактический, оперативный. Каждому уровню управления приписываются соответствующие функции и задачи, реализации и решения, которых, необходимо для "перемещения организации во времени" – её функционирования во времени. Это приводит нас к понятию управленческая пирамида организации.
Билет 18. 1) Постановка задачи управления в стохастическом случае. Обозначим через y(t) – состояние системы в момент времени t. Если переменные состояния – действительные числа и их всего n, то . Отображение описывает эволюцию, движение, поведение системы. Будем предполагать, что эволюция системы описывается некоторой моделью. Здесь возможны самые разнообразные ситуации. Модели могут быть детерминированными, со случайными факторами, с запаздыванием и т.п. Функция в свою очередь может быть непрерывной – разрывной, регулярной (дифференцируемой) – нерегулярной (недифференцируемой) и т. д. Если при моделировании мы решили учитывать и случайные факторы, то изменение состояния системы будет уже случайной величиной. В этом случае естественно предположить, что к правой части (2) добавляются случайные поправки. При отсутствии информации о характеристиках случайных процессов (средние, дисперсия, закон распределения) проще всего предположить, что эта случайная поправка распределена по нормальному закону со средним значением равным нулю и дисперсией, зависящей, в общем, и от y(t). Тогда, если две поправки, соответствующие двум не пересекающим интервалам времени независимы, в общем случае можно принять модель (4) где - матрица, а распределено по нормальному закону со средним О и дисперсией (E – единичная матрица). Соотношение (4) представляет эволюцию системы в виде суммы двух процессов: детерминированного и случайного. Последний может представляться как описание воздействия на систему со стороны окружающей среды. Важным моментом представления (4) является требование того, что для непересекающихся интервалов времени и были независимы. Это означает, что мы требуем, чтобы случайный процесс был Марковским, независимым от прошлого. Будущее системы будет определяться только его настоящим, так как мы решили процесс запаздывания не рассматривать. В этом случае достаточно предположить, что w(t) есть так называемый n-мерный Винеровский процесс и (5). Тогда требуемое свойство независимости от прошлого выполняется. Если , то в общем случае (4) можно записать в виде равенства дифференциалов (6) а не в форме производных (1), ибо винеровский процесс, будучи непрерывным и имеющим ограниченную вариацию, не является дифференцируемым. Примером винеровского процесса является, например процесс броуновского движения частиц. Он находит широкое применение при анализе будущих изменений цен активов в финансовых задачах. Именно по этой причине он здесь и упоминается. Уравнение (6) называется стохастическим дифференциальным уравнением в смысле Ито.
Билет 18. 3) Организация задачи мониторинга объекта управления. Этапы. Задача мониторинга производительности заключается в: сборе и обработке различных показателей производительности; 2)Моделирование и анализ изменений в существующей конфигурации; 3)Эффективный поиск узких мест; 4)Управление и обоснование затрат. Для реализации задачи мониторинга ОУ требуется знание о временных масштабах процессов, происходящих в ОУ. Эта информация необходима для установления периодичности наблюдения за ОУ. Иногда мы обладаем информацией о состоянии ОУ лишь в некоторые моменты времени или имеем неполную информацию. В этом случае принято говорить о частичной наблюдаемости ОУ, в отличие от полной. Например, рассматривая Университет как ОУ с точки зрения обучения студентов, убеждаемся, что он обладает частичной наблюдаемостью – лишь после проведения экзаменационных сессий. В течение семестра учебная часть, как элемент СУ, может судить об успеваемости студентов косвенным образом, отслеживая (наблюдая) текущую посещаемость занятий.
Билет 18. 2) Регулятор. Типы регуляторов. Примеры регуляторов. Под регулированием будем понимать процесс поддержания или изменения по заданным условиям некоторой величины (показателя) с помощью целенаправленного воздействия — управления. Показатель – величина (информация), на знании которой основывается процесс регулирования. Критерий – заданное условие, ограничение, накладываемое на показатель регулирования Ω. С задачей регулирования тесно связана задача слежения. В этом случае задающий сигнал (условие) испытывает зависимость от времени. К необходимости регулировки приводит изменение желаемого режима функционирования системы из-за внешних воздействий со стороны ОС или изменения свойств элементов системы и/или свойств взаимодействия элементов системы между собой. Если регулирование происходит без непосредственного участия человека то оно называется автоматическим. (Задача о грузе на пружине). Если основная задача управления заключается в том, чтобы выходной сигнал системы «следил» за меняющимся задающим сигналом yi= yi(t) , то такая система управления называется следящей. Если же основная задача управления заключается в том, чтобы выходной сигнал поддерживался равным или приблизительно равным постоянному задающему сигналу (уставке) yi= const, то такая система управления называется регулятором.
Добавим к пружине
амортизатор,усилие которого определяется
скоростью изменения растяжения. Тогда
модель этой системы – модель ОУ примет
следующий вид:
![]() (4) где fd
– шум, а управляющее воздействие fс
осуществляется пропорциональным
регулятором fс
= k
(yi
- yо)
— (5)
(4) где fd
– шум, а управляющее воздействие fс
осуществляется пропорциональным
регулятором fс
= k
(yi
- yо)
— (5)
Подобные системы управления, движения которых имеют первый порядок, назовем системами первого порядка.
Регулятор, задаваемый
соотношением (5) на-ся пропорц. или
П-регулятором.
В нашем случае, когда ОУ описывается
системой второго порядка возможно
использование не только П-регулятора,
но и Д-регулятора (дифференциального),
в котором управляющее воздействие
определяется пропорционально скорости
изменения ошибки![]() .
И-регулятор.При
таком управлении сигналу ошибки
пропорциональна скорость изменения
управляющего сигнала (а не сам сигнал!).
.
И-регулятор.При
таком управлении сигналу ошибки
пропорциональна скорость изменения
управляющего сигнала (а не сам сигнал!).
![]() (18)Из
(18) ясно, что управляющее воздействие
yc
регулятора будет изменяться до тех пор,
пока ошибка отличается от нуля.
Происхождение термина «интегральный»
становится ясным, если проинтегрировать
(18) по времени, что дает :
(18)Из
(18) ясно, что управляющее воздействие
yc
регулятора будет изменяться до тех пор,
пока ошибка отличается от нуля.
Происхождение термина «интегральный»
становится ясным, если проинтегрировать
(18) по времени, что дает :![]() (19) или
управляющее воздействие определяется
как пропорциональное интегралу сигнала
ошибки во времени. Интегральный регулятор
как бы «запоминает» поведение ошибки
во времени, и эта память, сохраняемая
регулятором и после того, как сигнал
ошибки стал равен нулю, позволяет
поддерживать корректирующее воздействие,
необходимое для компенсации сигнала
ошибки. В этом состоит коренное отличие
И-регулятора от П и Д-регуляторов.
Примеры: интегральный: динамика поведения
шарика в лунке (процесс
overshoot)(перерегулирование),
попл.камера карб (если нальем много
бензина, то поплавок будет колебаться
но через некоторое время примет нужное
положение). Вообще автоматич регуляторы
применяются везде: в компах, в лифтах и
т.д.
(19) или
управляющее воздействие определяется
как пропорциональное интегралу сигнала
ошибки во времени. Интегральный регулятор
как бы «запоминает» поведение ошибки
во времени, и эта память, сохраняемая
регулятором и после того, как сигнал
ошибки стал равен нулю, позволяет
поддерживать корректирующее воздействие,
необходимое для компенсации сигнала
ошибки. В этом состоит коренное отличие
И-регулятора от П и Д-регуляторов.
Примеры: интегральный: динамика поведения
шарика в лунке (процесс
overshoot)(перерегулирование),
попл.камера карб (если нальем много
бензина, то поплавок будет колебаться
но через некоторое время примет нужное
положение). Вообще автоматич регуляторы
применяются везде: в компах, в лифтах и
т.д.
Билет 22. 1) Функции оператора в человеко-машинных системах управления. При автоматизировании управления и производства человек часто остается в производственной системе, однако меняет при этом свои функции. В частности из субъекта управления он становится человеком-оператором данной автоматизированной производственной системы. Естественно, необходимо не только создавать для человека условия труда на основе выяснения его психофизиологических возможностей и иных эргономических требований, но и обеспечивать высокую эффективность процесса, так как это требование увеличения эффективности остается главными не зависит от того, присутствует ли в системе человек или нет. Степень участия человека в системах управления может изменяться в широких пределах от систем, в которых все управленческие функции выполняются человеком, до систем, в которых все эти функции реализуются автоматически. С одной стороны, современные средства автоматики не всегда могут заменить человека в системе управления. С другой стороны, существуют ситуации и объекты, управлять которыми человек не в состоянии по своим физическим возможностям. Перечислим условия, в которых автоматическое управление является необходимым: 1)Система управления может находиться в среде, опасной для жизни и здоровья человека. 2)Физические, физиологические и психологические возможности человека (мускульные усилия, реакция, восприятие информации, скорость переработки, работоспособность, утомляемость) для управления объектом или процессом недостаточны. Можно привести несколько случаев, когда необходимость автоматики может быть обоснована экономически: 1)Нехватка трудовых ресурсов, например, в неосвоенных или отдаленных северных районах. 2)Участие человека в управлении объектом может потребовать от него весьма высокой квалификации. 3)При управлении объектом в критических и аварийных ситуациях. Специалист, прекрасно справляющийся со своими обязанностями в обычных условиях функционирования системы, может в аварийных ситуациях оказаться неспособным к принятию правильных решений по управлению под влиянием различных психологических и физиологических факторов. Следует принять во внимание и действие пресловутого «человеческого фактора»: выражающегося в неадекватном поведении человека в ситуации, объективно не располагающей его к этому.
Преимущество человека в ситуациях |
Преимущество автоматики в ситуациях |
|
|