

Вопрос № 4. Назначение, конструкция и работа астрономического компаса
Астрокомпасами называются приборы для определения истинного или ортодромического курса путем пеленгации небесных светил с учетом вращения Земли и координат местоположения летательного аппарата. Пеленгация светил позволяет определить направление небесного меридиана и, используя взаимосвязь его положения с координатами точки наблюдения и временем, вычислить искомые навигационные параметры. С помощью астрокомпасов можно измерять курс в любых районах земного шара, на любых скоростях и высотах. Однако автономность ограничена условиями видимости небесных светил. По методам измерений астрокомпасы разделяются на горизонтальные и экваториальные в зависимости от выбора навигационной системы координат.
В горизонтальной системе координат (рис. 4) положение светила С определяется относительно истинного горизонта и небесного меридиана высотой h и азимутом A соответственно.

Рис. 4. Горизонтальная система координат
Высотой светила h называют угол, отсчитываемый по дуге вертикала светила от плоскости истинного горизонта до светила.
Азимутом светила называется двугранный угол между плоскостью начального меридиана ZSZ' и плоскостью вертикала светила ZCZ', измеренный в плоскости местного горизонта. Азимут и высота светила вследствие кажущегося вращения небесной сферы непрерывно изменяются и являются функциями времени. В экваториальной системе координат (рис. 5) положение светила С определяется относительно небесного экватора и круга склонения светила углом t и склонением δ.
Рис. 5. Экваториальная система координат
Часовым углом называется угол, отсчитываемый но дуге небесного экватора от точки юга А до точки пересечения круга склонения светила с экватором.
Склонением светила называется угол между направлением на светило и плоскостью небесного экватора.
При построении обеих систем координат небо условно представляют в виде сфера произвольного радиуса, центром которой является наблюдатель. Вертикаль места наблюдения, продолженная до пересечения с небесной сферой, дает точки Z - зенит и Z' - надир, а ось вращения Земли - северный Pn и южный Ps полюсы мира.
Плоскость, проходящая через вертикаль ZZ' и светило С, дает на сфере вертикал светила ZCZ'. Плоскость, проходящая через ось мира Pn-Ps и светило С, дает на сфере круг склонения, светила. Небесный меридиан образуется путем пересечения сферы плоскостью, проходящей через точки Pn, Ps и Z.
Принцип устройства астрокомпасов рассмотрим на примере дистанционного астрокомпаса ДАК-ДБ, работающего в горизонтальной системе координат.
Определение курса летательного аппарата в этом компасе производится по формуле

где, КУ - курсовой угол светила, определяемый как угол между плоскостью пеленгации и продольной осью самолета в проекции на горизонтальную плоскость.
Курсовой угол измеряется с помощью пеленгаторной системы, а азимут рассчитывается по формуле

где, λ и φ - долгота и широта места измерения соответственно;
tГ - гринвичский часовой угол.
Реализация зависимости (8.3) осуществляется путем моделирования небесной сферы с помощью пространственного механизма - сферанта. Структурная схема астрокомпаса представлена на pиc. 8.11.
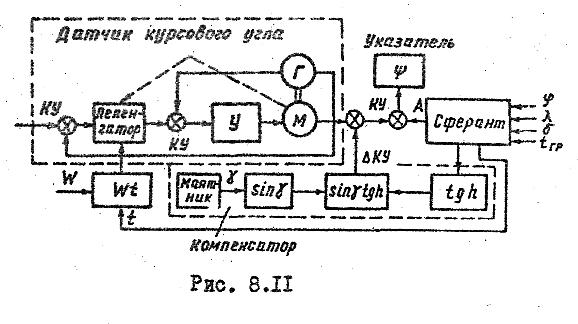
Рис. 6. Структурная схема астрокомпаса
Основными элементами компаса являются: датчик курсового угла светила, вычислитель азимута (сферант) и компенсатор методической погрешности.
Датчик курсового угла включает в себя пеленгатор с фотоэлементами и следящую систему, состоящую из двигатель-генератора и усилителя и обеспечивающую автоматическое удержание пеленгатора в плоскости вертикала светила. Сферант обеспечивает определение азимута светила по азимутальному лимбу при введении в него информации λ, φ, δ и tГР. Ввод информации осуществляется вручную и контролируется по соответствующим шкалам. Снятие сигнала курса производится с дифференциального сельсина сферанта, обеспечивающего алгебраическое сложение сигналов курсового угла и азимута. Компенсатор методической погрешности обеспечивает уменьшение погрешности в определении курса, зависящей от крена самолета γ и высоты светила h.
Примером экваториальных астрокомпасов могут служить компасы ДАК-Б и АК-53П.
Погрешности обоих типов астрокомпасов не превосходит ± 2° для нормальных условий измерений, оговоренных в инструкциях по эксплуатации.
Вывод: астрономические системы навигации (АСН) предназначены для определения координат местоположения самолета позиционным методом по двум линиям положения - линиям равных высот небесных светил. АСН являются ограниченно автономными системами, поскольку их работа определяется видимостью светил, а также требует наличия информации о их местоположении на небесной сфере. Важным достоинством АСН является высокая точность навигационных измерений, не зависящая от длительности, высоты и скорости полета. Выполнение навигационных измерений возможно в любых географических районах Земли.