

|
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный университет аэрокосмического приборостроения» |
|
Военная кафедра при ГУАП |
|||
|
цикл Военно-воздушных сил |
|||
|
|
|
|
|
|
|
|
Утверждаю |
|
|
|
|
Начальник военной кафедры при ГУАП |
|
|
|
|
полковник В. Скуратов |
|
|
|
|
«___»_______________ 20___ г. |
|
|
|
|
|
|
|
Групповое занятие № 30 «Магнитные и гироскопические датчики»
по дисциплине: |
|||
|
Эксплуатация и ремонт авиационного оборудования самолетов и |
|||
|
вертолетов |
|||
|
(наименование учебной дисциплины) |
|||
|
|
|||
|
Военно-учетная специальность: |
«Эксплуатация и ремонт авиационного |
||
|
оборудования самолётов и вертолётов» |
|||
|
|
(наименование ВУС) |
||
|
|
Рассмотрено и одобрено |
|
|
на заседании военной кафедры при ГУАП |
|
|
Протокол № _____ |
|
|
от «____» _____________ 20___ г. |
Санкт-Петербург
2011 г.
Содержание группового занятия Введение
Магнитным компасом называется устройство, с помощью которого определяется направление магнитного меридиана. Магнитный компас, по-видимому, можно считать одним из первых навигационных приборов, применявшихся человеком. Имеются сведения, что еще за 2,5 тысячи лет до н.э., в Китае было известно свойство свободно подвешенного магнита указывать на Север. В Европе компас стали применять только в XI—XII вв.
Вопрос 1. Магнитные и гироскопические датчики курса (гирополукомпасы)
В настоящее время магнитные компасы являются не основными навигационными приборами, однако благодаря одному очень важному достоинству — автономности — до сих пор используются в авиации в качестве резервных курсовых приборов.
Современный магнитный компас — это устройство, не требующее никакого электрического питания, имеет весьма небольшие размеры, масса не превышает 200 г.
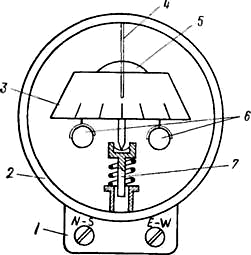
Рис. 1. Кинематическая схема магнитного компаса:1—девиационный прибор;
2—корпус; 3—картушка; 4—индекс; 5—поплавок; 6—магниты; 7—подпятник
Рассмотрим принцип работы авиационного магнитного компаса.
Компас (рис. 1) представляет собой пластмассовый сосуд 2 шарообразной формы, внутри которого находятся два постоянных магнита с одинаково направленными полюсами. Магниты крепятся к поплавку 5, имеющему картушку (шкала) 3, и опираются на подпятник 7, представляющий собой подшипник. Подшипник крепится к корпусу с помощью пружины. Вертикальный неподвижный индекс 4 служит для отсчета показаний по шкале. Корпус прибора заполняется вязкой прозрачной жидкостью, удельный вес которой подбирается таким образом, чтобы вся подвижная система компаса обладала небольшой отрицательной плавучестью и оказывала минимальное давление на подшипник, уменьшая момент трения в нем. Кроме того, жидкость выполняет роль демпфирующей среды.
Устройство 1 предназначено для устранения девиации компаса.
Магнитная система компаса, взаимодействуя с магнитным полем Земли, стремится занять направление, параллельное вектору Т магнитного поля Земли. Поскольку магнитный компас должен определять направление горизонтальной составляющей Н магнитного поля Земли и его картушка не должна иметь наклонов, то «южный» конец картушки делают тяжелее. В результате создается момент, компенсирующий в какой-то степени момент, действующий от вертикальной составляющей магнитного поля Земли Z.
Естественно, что таким способом можно компенсировать действие вертикальной составляющей Z далеко не полностью и, например, для северного полушария Земли. В южных широтах компас с утяжеленным «южным» концом картушки будет иметь тенденцию к наклону. Пусть магниты компаса составляют с направлением горизонтальной составляющей магнитного поля Земли некоторый угол.
Картушка компаса успокаивается дольше, но зато она меньше подвержена колебаниям, поэтому и ошибка при рысканиях самолета должна быть меньше. За счет сильных демпфирующих свойств показания компаса при рыскании самолета будут устойчивее. В то же время при разворотах самолета истинное значение компасного магнитного курса, индицируемое компасом, будет запаздывать по отношению к развороту самолета.
При проектировании магнитного компаса величины р и q, т.е. соотношение между вращающим моментом и моментом демпфирования, выбирают таким образом, чтобы время прихода к установившемуся значению было минимальным и система не обладала большой колебательностью, иначе отсчет показаний компаса будет неудобным.
Гироиндукционный компас представляет собой курсовую систему, соединяющую в себе два датчика курса; индукционный магнитный датчик и курсовой гироскоп.
В ГИК-1 можно выделить три следящие системы, с помощью которых осуществляются функциональные связи в системе:
1. Следящая система индукционный датчик — коррекционный механизм (ИД-КМ), предназначена для преобразования электрического сигнала, снимаемого с индукционного датчика, в механическую величину.
2. Следящая система коррекционный механизм — гироагрегат (КМ-ГА), предназначена для коррекции гироагрегата от индукционного датчика, фильтрации и сглаживания высокочастотных погрешностей индукционного датчика и для компенсации уходов гироскопа.
3. Следящая система гироагрегат — указатель (ГА-УШ), предназначена для дистанционной передачи курса, вырабатываемого на гироагрегате.
Следящая система «индукционный датчик - коррекционный механизм»
В этой следящей системе индукционный датчик служит для определения магнитного курса. Рассмотрим его работу.
Пусть два пермаллоевых стержня параллельны друг другу, имеют свою первичную обмотку, питающуюся переменным напряжением. Обмотки намотаны таким образом, что магнитные потоки в первом и во втором стержнях в каждый момент равны по величине и противоположны по направлению. Следовательно, в каждый момент времени суммарный магнитный поток от двух первичных обмоток равен нулю, и он не может индуцировать ЭДС во вторичной обмотке, охватывающей оба стержня.
Рассмотрим процессы, происходящие в магнитном зонде, если учесть, что он находится в магнитном поле Земли, причем оба сердечника лежат в горизонтальной плоскости. Если напряжение достаточно велико, то магнитная индукция В в пермаллоевых стержнях при прохождении тока в первичных обмотках в некоторый момент перестанет возрастать, т. е. имеет место насыщение.
Соответственно повышению индукции падает магнитная проницаемость. Когда индукция достигнет экстремума, магнитная проницаемость будет равна нулю, и наоборот, когда ток в первичной обмотке будет равен нулю, магнитная проницаемость достигнет максимума
Горизонтальная составляющая Н магнитного поля Земли сможет проникать в пермаллоевые сердечники только в моменты, когда магнитная проницаемость больше нуля. Следовательно, напряженность магнитного поля Земли меняется во времени. Магнитное поле Земли из постоянного поля превратилось в пульсирующее определенного направления.
Поскольку магнитное поле Земли изменяется в стержнях от нуля до какого то максимального значения, можно представить скорость изменения магнитного потока Земли во времени. Следовательно, переменный (пульсирующий) магнитный поток создаст во вторичной обмотке переменный ток.
Величина выходного напряжения U2 зависит от направления горизонтальной составляющей магнитного поля Земли относительно магнитного зонда. Очевидно, напряжение U2 будет максимальным, если направление горизонтальной составляющей Н совпадает с осью симметрии магнитного зонда, т. е. Казалось бы, что из уравнения можно определить магнитный курс, но, к сожалению, величина горизонтальной составляющей магнитного поля Земли зависит от географической широты места, и напряжение U2 оказывается функцией двух переменных: широты места и направления магнитного поля Земли.
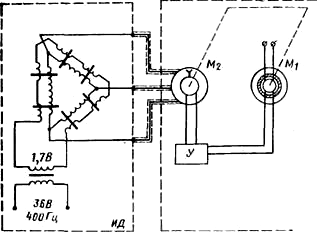
Рис. 2. Электрическая схема получения магнитного курса с помощью
индукционного датчика
Поэтому в курсовых системах, в частности, в ГИК-1, применяют компенсационный способ измерения, не зависящий от величины напряженности магнитного поля Земли и определяющий только его направление. На рис. 2 представлена электрическая схема такого измерителя.
Вместо одного магнитного зонда в схеме используются три расположенные в пространстве относительно друг друга под углом 120°. Вторичные обмотки включены по схеме треугольника, вершины которого соединяются с тремя статорными обмотками сельсина-приемника М.2. Сельсин-приемник расположен в специальном блоке, называемом коррекционным механизмом (КМ). Первичные обмотки магнитного зонда питаются током с напряжением 1,7 В и частотой 400 Гц. Магнитное поле Земли будет наводить в зондах датчика не одинаковые ЭДС, а в соответствии с их пространственной ориентацией. Поэтому потенциалы на статорных обмотках сельсина зависят от направления горизонтальной составляющей магнитного поля Земли. Результирующее магнитное поле, создаваемое статорными обмотками сельсина, будет соответствовать направлению горизонтальной составляющей магнитного поля Земли.
С роторной обмотки сельсина М2 сигнал поступает на усилитель, а с него — на двигатель M1, поворачивающий роторную обмотку в положение, при котором напряжение на ней равно нулю.
Таким образом, рассмотренная схема следящей системы ИД-КМ преобразует сигнал, поступающий с индукционного датчика ИД, в угол поворота ротора двигателя, пропорциональный магнитному курсу.
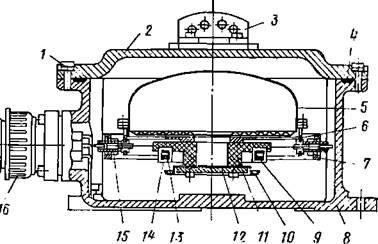
Рис. 3. Конструкция индукционного датчика ИД: 1-винт; 2-крышка;
3-девиационный прибор; 4-прокладка; 5-поплавок; 6-основание; 7-наружное кольцо; 8-корпус; 9-катушка первичной обмотки; 10-чашка; 11-платформа; 12-груз;
13-сердечник; 14- катушка сигнальной (вторичной) обмотки; 15-карданов подвес; 16 -штепсельный разъем
В индукционном датчике (рис. 3) магнитные зонды с жестко связанным с ними поплавком 5 помещаются в кардановом подвесе 15 корпуса прибора 8, заполненного жидкостью (лигроин и масло МВП). Жидкость, поплавок и карданов подвес обеспечивают примерную горизонтальность магнитных зондов при кренах самолета, уменьшая ошибки от вертикальной составляющей магнитного поля Земли.
Для компенсации полукруговой девиации служит девиационный прибор 3, расположенный на крышке 2 датчика.
Следует отметить, что индукционный датчик — более совершенный магнитный измеритель, чем КИ-13, поскольку он обладает большей чувствительностью, в нем отсутствуют ошибки от увлечения и застоя, а вместе с коррекционным механизмом имеется возможность устранения четвертной магнитной девиации. Коррекционный механизм преобразует электрический сигнал индукционного датчика в угол поворота вала двигателя, связывает индукционный датчик с курсовым гироскопом, устраняет четвертную девиацию с одновременной компенсацией погрешностей индукционного датчика и следящей системы ИД-КМ.
Компенсация четвертной девиации и инструментальных погрешностей осуществляется в коррекционном механизме специальным электромеханическим коррекционным устройством лекального типа, называемым лекальным корректором
Следящая система «коррекционный механизм - гироагрегат»
Система служит для выработки гиромагнитного курса, который отличается от магнитного своей стабильностью благодаря фильтрации и сглаживанию высокочастотных помех индукционного датчика. Гиромагнитный курс иногда называют «осредненным» магнитным курсом.
Следящую систему (рис. 4) образуют два потенциометра: потенциометр-датчик ПД, расположенный в гироагрегате и жестко связанный с внешней осью карданова подвеса гироскопа, и потенциометр-приемник ПП, находящийся в коррекционном механизме
Следящая система «гироагрегат - указатель»
Таких следящих систем может быть несколько в зависимости от комплектации.
Следящая система ГА-УГР-1 предназначена для передачи гиромагнитного курса от гироагрегата на указатель типа УГР-1. Указатель, кроме гиромагнитного курса, может индицировать курсовые углы и магнитные пеленги радиостанции при совместной работе ГИК-1 с автоматическим радиокомпасом.

Рис. 4. Электромеханическая схема следящей системы ГА-УГР-1: ПД—потенциометр-датчик; ПП—потенциометр-приемник; М1—двигатель; Мг— сельсин-приемник АРК; Ш—шкальное устройство
Следящая система ГА-УГР-1 представлена на рис. 4. Как видно из схемы (рис. 4), это обычная трехпроводная потенциометрическая следящая система, скорость отработки которой выбирается таким образом, чтобы обеспечить качественное слежение за разворотами самолета по курсу. Двигатель M1 следящей системы связан с подвижной шкалой (рис. 9.13), положение которой относительно неподвижного индекса определяет отсчет гиромагнитного курса. В указателе УГР-1 имеется сельсин-приемник М2 от следящей системы АРК-УГР-1, работающей в индикаторном режиме. С ротором сельсина-приемника связана стрелка 1, которая показывает по неподвижной шкале курсовой угол радиостанции, а по подвижной шкале — магнитный пеленг радиостанции. Для удобства пользования прибором в УГР-1 имеется курсозадатчик, который может поворачиваться с помощью кремальеры.
Вывод: